Recognition: unknown
UAVs as Dynamic Nodes in Communication Networks
Pith reviewed 2026-05-10 03:45 UTC · model grok-4.3
The pith
UAVs serve multiple dynamic roles in wireless networks, and a novel UAV-Network-in-a-Box architecture is proposed for emergency temporary coverage.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
As an advancement, we propose a novel UAV-Network-in-a-Box (NIB) architecture for disaster recovery and temporary coverage as an alternative to traditional network infrastructure.
Load-bearing premise
That UAVs can effectively and reliably fulfill multi-mode roles (relays, UE, gNB, RIS) with alternate power sources while addressing security issues in the proposed NIB architecture, without detailed feasibility analysis or validation.
Figures











read the original abstract
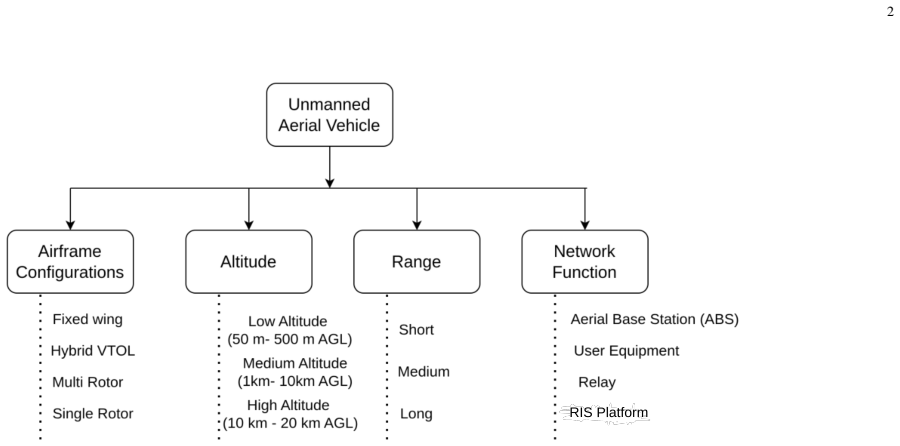
Driven by the demands of 5G/Beyond 5G and 6G networks, Unmanned Aerial Vehicles (UAVs) have surfaced in critical roles for aerial communications. In the present survey, we explore the multi-mode roles of UAVs as relays, User Equipment (UE), gNB and Reconfigurable Intelligent Surfaces (RIS), along with their deployment scenarios, architectural frameworks, and different communication models incorporating Artificial Intelligence (AI) configurations. We consider the effects of alternate power sources on the communication payload. The survey also aims to address security issues in the UAV communications. As an advancement, we propose a novel UAV-Network-in-a-Box (NIB) architecture for disaster recovery and temporary coverage as an alternative to traditional network infrastructure.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript surveys UAVs as dynamic nodes in 5G/B5G/6G networks, examining their multi-mode operation as relays, user equipment (UE), gNB, and reconfigurable intelligent surfaces (RIS), along with deployment scenarios, architectural frameworks, AI configurations, alternate power sources, and security considerations. It advances a novel UAV-Network-in-a-Box (NIB) architecture intended for disaster recovery and temporary coverage as an alternative to terrestrial infrastructure.
Significance. The survey compiles a broad literature overview on UAV communication roles and power/security issues, which may serve as a useful reference. The NIB proposal, if supported by subsequent quantitative validation, could contribute to resilient emergency networks by integrating multiple functions on a single mobile platform. At present the work remains descriptive and does not yet demonstrate the claimed practicality.
major comments (3)
- [NIB proposal section] NIB architecture proposal: the assertion that a single UAV can serve as a practical alternative to traditional infrastructure is not supported by any system-level block diagram, interface specification, or resource-sharing analysis showing how gNB, relay, RIS, and UE modes coexist on the same RF chain, compute platform, and battery under realistic loads.
- [Effects of alternate power sources] Power sources discussion: although alternate power sources are reviewed, the manuscript supplies no power-budget equation, link-budget calculation, or endurance estimate that incorporates disaster-scenario factors such as wind loading, temperature extremes, or simultaneous multi-mode RF transmission.
- [Security issues in UAV communications] Security section: the treatment of UAV security issues does not include a threat model specific to the physically exposed, mobile gNB component of the proposed NIB, leaving questions of physical tampering, jamming, or key distribution unaddressed.
minor comments (2)
- [Abstract and introduction] The abstract and introduction could more explicitly separate the survey synthesis from the novel NIB claim to clarify the paper's contributions.
- [Figures and tables] Figure captions and table headings should be expanded to indicate whether they summarize prior work or present new analysis.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our survey manuscript. We agree that the NIB proposal, power analysis, and security discussion would benefit from additional detail to better support the conceptual claims. As a survey paper, our revisions will focus on clarifications, high-level diagrams, and literature-based enhancements rather than new quantitative simulations. We address each major comment below.
read point-by-point responses
-
Referee: [NIB proposal section] NIB architecture proposal: the assertion that a single UAV can serve as a practical alternative to traditional infrastructure is not supported by any system-level block diagram, interface specification, or resource-sharing analysis showing how gNB, relay, RIS, and UE modes coexist on the same RF chain, compute platform, and battery under realistic loads.
Authors: We acknowledge that the NIB is presented conceptually without detailed engineering specifications. The manuscript is a survey that proposes the architecture as a high-level integration of UAV roles for disaster recovery. In revision, we will add a high-level system block diagram illustrating mode coexistence and a qualitative discussion of resource sharing across RF, compute, and power domains. Full interface specifications and load-specific analysis under realistic conditions exceed the scope of a survey and are identified as future work. revision: partial
-
Referee: [Effects of alternate power sources] Power sources discussion: although alternate power sources are reviewed, the manuscript supplies no power-budget equation, link-budget calculation, or endurance estimate that incorporates disaster-scenario factors such as wind loading, temperature extremes, or simultaneous multi-mode RF transmission.
Authors: The power section reviews literature on alternate sources and their general effects. We agree that explicit equations and scenario-specific estimates are missing. The revised version will include representative power-budget equations and endurance estimates based on published UAV studies, with qualitative discussion of disaster factors such as wind loading, temperature, and multi-mode transmission. Detailed link-budget calculations for all combinations remain outside the survey's remit and will be noted as requiring dedicated follow-on analysis. revision: yes
-
Referee: [Security issues in UAV communications] Security section: the treatment of UAV security issues does not include a threat model specific to the physically exposed, mobile gNB component of the proposed NIB, leaving questions of physical tampering, jamming, or key distribution unaddressed.
Authors: We will expand the security section to incorporate a dedicated threat model for the NIB's mobile gNB role. This addition will explicitly address physical tampering risks due to UAV exposure, jamming vulnerabilities on aerial platforms, and key-distribution challenges in dynamic, infrastructure-less settings, while linking these to the broader security issues already surveyed. revision: yes
Circularity Check
No circularity: descriptive survey with no equations or self-referential predictions
full rationale
The manuscript is a literature survey on UAV roles (relays, UE, gNB, RIS) plus a high-level proposal for a UAV-Network-in-a-Box architecture. No derivation chains, equations, fitted parameters, or quantitative models appear anywhere in the text. The NIB proposal is asserted as an advancement without any internal reduction to prior results, self-citations, or ansatzes; it simply extrapolates from the surveyed material. Because no load-bearing step reduces to its own inputs by construction, the circularity score is zero.
Axiom & Free-Parameter Ledger
invented entities (1)
-
UAV-Network-in-a-Box (NIB)
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Drone market size, share & trends analysis report,
Grand View Research, “Drone market size, share & trends analysis report,” https://www.grandviewresearch.com/industry-analysis/ drone-market-report, 2024, accessed: 2026-02-03
2024
-
[2]
India’s drone sector: Security, reg- ulation and dual-use challenges,
K. Rajagopalan and N. Aryan, “India’s drone sector: Security, reg- ulation and dual-use challenges,” https://www.orfonline.org/research/ Indias-drone-sector, Observer Research Foundation, Feb. 2024, ac- cessed: 2026-02-03
2024
-
[3]
Uav market by type, application & region – global forecast to 2030,
Markets and Markets, “Uav market by type, application & region – global forecast to 2030,” https://www.marketsandmarkets.com/ Market-Reports/unmanned-aerial-vehicles-uav-market-662.html, 2024, accessed: 2026-02-03
2030
-
[5]
5g-based drone service for high- rise structure management,
Ministry of Science and ICT (MSIT), “5g-based drone service for high- rise structure management,” https://smartcity.go.kr, Smart City Korea, Republic of Korea, 2020, accessed: 2026-02-03
2020
-
[6]
How drones can be used to combat covid- 19: Rapid guidance,
UNICEF Supply Division, “How drones can be used to combat covid- 19: Rapid guidance,” https://www.unicef.org/supply/media/5286/file/ Rapid-guidance-how-can-drones-help-in-COVID-19-response.pdf, UNICEF, 2020, accessed: 2026-02-03
2020
-
[7]
Research on uav network communication appli- cation based on 5g technology,
L. Cao and H. Wang, “Research on uav network communication appli- cation based on 5g technology,” inProc. 3rd Int. Conf. on Electronic Communications and Artificial Intelligence (IWECAI), Zhuhai, China, 2022, pp. 125–129
2022
-
[8]
A review on fuel cell-based power systems for uavs: Current status and applications,
M. Aamiret al., “A review on fuel cell-based power systems for uavs: Current status and applications,”Renewable and Sustainable Energy Reviews, vol. 131, p. 110010, 2020
2020
-
[9]
Solar-powered uav networks: Benefits and challenges,
H. Shakhatrehet al., “Solar-powered uav networks: Benefits and challenges,”IEEE Internet of Things Journal, vol. 9, no. 2, pp. 1367– 1382, 2022
2022
-
[10]
Unmanned aerial vehicles (uavs): A survey on civil applications and key research challenges,
A. Shakhatreh, A. H. Sawalmeh, A. Al-Fuqahaet al., “Unmanned aerial vehicles (uavs): A survey on civil applications and key research challenges,”IEEE Access, vol. 7, pp. 48 572–48 634, 2019
2019
-
[12]
A sur- vey on uav-enabled ultra-reliable low-latency communications,
A. Al-Hourani, K. Gomez, S. Kandeepan, and S. Lardner, “A sur- vey on uav-enabled ultra-reliable low-latency communications,”IEEE Communications Surveys & Tutorials, vol. 23, no. 4, pp. 1–34, 2021
2021
-
[13]
Survey on uav-assisted wireless communications: Challenges, technologies, and applications,
S. Hayat, E. Yanmaz, and R. Muzaffar, “Survey on uav-assisted wireless communications: Challenges, technologies, and applications,” IEEE Access, vol. 12, pp. 1–25, 2024
2024
-
[14]
A survey on security and privacy issues in uav communication networks,
A. K. Das, M. Wazid, S. Zeadally, and Y . Park, “A survey on security and privacy issues in uav communication networks,”IEEE Communications Surveys & Tutorials, vol. 25, no. 1, pp. 1–38, 2023
2023
-
[15]
Collaborative uav communication networks: A survey,
Y . Liu, X. Li, H. Ji, and H. Zhang, “Collaborative uav communication networks: A survey,”IEEE Access, vol. 11, pp. 1–20, 2023
2023
-
[16]
Uav-assisted data collection in wireless sensor networks: A comprehensive survey,
A. Oubbati, N. Chaib, A. Lakas, and P. Lorenz, “Uav-assisted data collection in wireless sensor networks: A comprehensive survey,”IEEE Communications Surveys & Tutorials, vol. 22, no. 4, pp. 2732–2760, 2020
2020
-
[17]
Survey of important issues in uav communication networks,
L. Gupta, R. Jain, and G. Vaszkun, “Survey of important issues in uav communication networks,”IEEE Communications Surveys & Tutorials, vol. 18, no. 2, pp. 1123–1152, 2016
2016
-
[18]
Survey on uav cellular communications: Prac- tical aspects, standardization, and regulation,
M. Fotouhi, H. Qiang, M. Ding, M. Hassan, L. G. Giordano, A. Garcia- Rodriguez, and J. Yuan, “Survey on uav cellular communications: Prac- tical aspects, standardization, and regulation,”IEEE Communications Surveys & Tutorials, vol. 21, no. 4, pp. 3417–3442, 2019
2019
-
[20]
A tutorial on uavs for wireless networks: Applications, challenges, and open problems,
M. Mozaffari, W. Saad, M. Bennis, Y . H. Nam, and M. Debbah, “A tutorial on uavs for wireless networks: Applications, challenges, and open problems,”IEEE Communications Surveys & Tutorials, vol. 21, no. 3, pp. 2334–2360, 2019
2019
-
[21]
A comprehensive survey on 5g-and-beyond networks with uavs: Applications, emerging technologies, regulatory aspects, research trends and challenges,
M. K. Banafaaet al., “A comprehensive survey on 5g-and-beyond networks with uavs: Applications, emerging technologies, regulatory aspects, research trends and challenges,”IEEE Access, vol. 12, pp. 7786–7826, 2024
2024
-
[22]
5g network slicing with unmanned aerial vehicles: Taxonomy, survey, and future directions,
T. Bouzid, N. Chaib, M. L. Bensaad, and O. S. Oubbati, “5g network slicing with unmanned aerial vehicles: Taxonomy, survey, and future directions,”Transactions on Emerging Telecommunications Technolo- gies, vol. 34, no. 3, p. e4721, 2023
2023
-
[23]
Study on enhanced lte support for aerial vehicles (release 15),
3GPP, “Study on enhanced lte support for aerial vehicles (release 15),” https://www.3gpp.org/ftp/Specs/archive/36 series/36.777/, 3GPP, Tech. Rep. TR 36.777 V15.0.0, Dec. 2017
2017
-
[24]
Minimum requirements related to technical performance for imt-2020 radio interface(s),
ITU-R, “Minimum requirements related to technical performance for imt-2020 radio interface(s),” https://www.itu.int/en/ITU-R/ study-groups/rsg5/rwp5d/imt-2020/Pages/default.aspx, International Telecommunication Union, Tech. Rep. Report ITU-R M.2410-0, Nov. 2017
2020
-
[25]
Framework and overall objectives of the future development of imt for 2030 and beyond,
——, “Framework and overall objectives of the future development of imt for 2030 and beyond,” https://www.itu.int/rec/R-REC-M.2160, International Telecommunication Union, Tech. Rep. Recommendation ITU-R M.2160, Dec. 2023
2030
-
[26]
Experiential networked intelligence (eni); ai-enabled self- optimizing networks,
ETSI, “Experiential networked intelligence (eni); ai-enabled self- optimizing networks,” https://www.etsi.org/deliver/etsi gr/ENI/001 099/001/01.01.01 60/gr ENI001v010101p.pdf, European Telecommu- nications Standards Institute, Tech. Rep. ETSI GR ENI 001, Apr. 2019
2019
-
[27]
Satellite earth stations and systems (ses); interoperability between uav systems and satellite networks,
——, “Satellite earth stations and systems (ses); interoperability between uav systems and satellite networks,” https://www.etsi.org/ committee/ses, ETSI TC SES, Ongoing, ongoing work
-
[28]
Ieee recommended practice for software-defined networking (sdn) based middleware for control and management of wireless networks,
IEEE, “Ieee recommended practice for software-defined networking (sdn) based middleware for control and management of wireless networks,” https://standards.ieee.org/ieee/1930.1/10917/, IEEE, Tech. Rep. IEEE Std 1930.1-2022, Sep. 2022
1930
-
[29]
Draft standard for aerial communications and networking,
——, “Draft standard for aerial communications and networking,” https://grouper.ieee.org/groups/1920/1/P1920.1.pdf, Ongoing, iEEE P1920.1, ongoing work
1920
-
[30]
Ieee approved draft standard for spatial web protocol, architecture and governance,
IEEE Standards Association, “Ieee approved draft standard for spatial web protocol, architecture and governance,” https://standards.ieee.org/ ieee/2874/11717/, IEEE, Tech. Rep. IEEE Std 2874-2025, May 2025
2025
-
[31]
IEEE Standard 1937.1-2020 - Interface Requirements and Performance Characteristics of Payload Devices in Drones,
IEEE, “IEEE Standard 1937.1-2020 - Interface Requirements and Performance Characteristics of Payload Devices in Drones,” https: //standards.ieee.org/ieee/1937.1/7456/, 2020
1937
-
[32]
IEEE P1936.1 Working Group,
——, “IEEE P1936.1 Working Group,” https://sagroups.ieee.org/, 2024
2024
-
[33]
Recent research progress of unmanned aerial vehicle regulation poli- cies and technologies in urban low altitude,
“Recent research progress of unmanned aerial vehicle regulation poli- cies and technologies in urban low altitude,”IEEE Access, vol. 8, pp. 74 175–74 194, 2020
2020
-
[34]
IEEE P1939.1 Working Group,
IEEE, “IEEE P1939.1 Working Group,” https://sagroups.ieee.org/, 2024
2024
-
[35]
IEEE P1920.1 - Draft Standard for Aerial Communications and Networking,
——, “IEEE P1920.1 - Draft Standard for Aerial Communications and Networking,” https://www.techstreet.com/standards/ieee-p1920-1? product id=2188351, 2024
2024
-
[36]
IEEE P1920.1 Draft - Aerial Ad Hoc Networks,
——, “IEEE P1920.1 Draft - Aerial Ad Hoc Networks,” https://standards.globalspec.com/std/14327636/IEEE%20P1920.1% 20DRAFT, 2024
-
[37]
IEEE P1954 - Self-Organizing Spectrum-Agile Unmanned Aerial Vehicles Communications,
——, “IEEE P1954 - Self-Organizing Spectrum-Agile Unmanned Aerial Vehicles Communications,” https://standards.ieee.org/ieee/1954/ 10686/, 2024
1954
-
[38]
IEEE P1937.9 - Requirements for External Power and Power Management Interfaces for Unmanned Aerial Vehicles,
——, “IEEE P1937.9 - Requirements for External Power and Power Management Interfaces for Unmanned Aerial Vehicles,” https: //standards.ieee.org/ieee/1937.9/10685/, 2024
1937
-
[39]
ANSI UASSC Standardization Roadmap for Unmanned Aircraft Systems – Version 2,
American National Standards Institute (ANSI), “ANSI UASSC Standardization Roadmap for Unmanned Aircraft Systems – Version 2,” https://share.ansi.org/Shared%20Documents/Standards%20Activities/ UASSC/ANSI UASSC Roadmap V2 June 2020.pdf, 2020, uASSC Roadmap V2
2020
-
[40]
ATIS- I-0000060: Unmanned Aerial Vehicle (UA V) Utilization of Cellular Services Enabling Scalable and Safe Operation,
Alliance for Telecommunications Industry Solutions (ATIS), “ATIS- I-0000060: Unmanned Aerial Vehicle (UA V) Utilization of Cellular Services Enabling Scalable and Safe Operation,” https://access.atis.org/ apps/group public/download.php/36134/ATIS-I-0000060.pdf, 2024
2024
-
[41]
ATIS-I-0000069: Support for UA V Communications in 3GPP Cellular Standards,
——, “ATIS-I-0000069: Support for UA V Communications in 3GPP Cellular Standards,” https://access.atis.org/higherlogic/ws/public/ download/42855/ATIS-I-0000069.pdf, 2024
2024
-
[42]
ATIS-I-0000071: Use of UA Vs for Restoring Communi- cations in Emergency Situations,
——, “ATIS-I-0000071: Use of UA Vs for Restoring Communi- cations in Emergency Situations,” https://access.atis.org/apps/group public/download.php/43969/ATIS-I-0000071.pdf, 2024
2024
-
[43]
ATIS-I-0000074: Use of Cellular Communication to Support Unmanned Aerial Vehicle (UA V) Flight Operations,
——, “ATIS-I-0000074: Use of Cellular Communication to Support Unmanned Aerial Vehicle (UA V) Flight Operations,” https://access. atis.org/apps/group public/download.php/48760/ATIS-I-0000074.pdf, 2024
2024
-
[44]
ATIS-I-0000092: 3GPP Release 17 – Building Blocks for UA V Applications,
——, “ATIS-I-0000092: 3GPP Release 17 – Building Blocks for UA V Applications,” https://access.atis.org/higherlogic/ws/public/ download/66824, 2024
2024
-
[45]
An independent uav-based mobile base station,
S. C. Choi and S. Y . Kim, “An independent uav-based mobile base station,”IEEE Sensors Journal, vol. 25, no. 5, p. 1349, Feb. 2025. 29
2025
-
[46]
Unmanned aerial vehicle- enabled layered architecture-based solution for disaster management,
A. Khan, S. Gupta, and S. K. Gupta, “Unmanned aerial vehicle- enabled layered architecture-based solution for disaster management,” Transactions on Emerging Telecommunications Technologies, vol. 32, no. 12, p. e4370, 2021
2021
-
[47]
Optimizing dynamic deployment of uav base stations: A digital twin approach,
L. Qi, Y . Wu, S. Dang, and D. Simeonidou, “Optimizing dynamic deployment of uav base stations: A digital twin approach,” inProc. IEEE Wireless Communications and Networking Conference (WCNC), Milan, Italy, 2025, pp. 1–6
2025
-
[48]
A UA V-aided digital twin framework for IoT networks with high accuracy and synchroniza- tion,
G. Khalaf, M. Itani, and S. Sharafeddine, “A UA V-aided digital twin framework for IoT networks with high accuracy and synchroniza- tion,”arXiv preprint, vol. arXiv:2504.15967, Apr. 2025, available: arXiv:2504.15967
-
[49]
Digital twin-enabled domain adaptation for zero- touch UA V networks: Survey and challenges,
A. Rahmanet al., “Digital twin-enabled domain adaptation for zero- touch UA V networks: Survey and challenges,”Comput. Netw., vol. 234, 2023
2023
-
[50]
Integrated sens- ing and communications: Towards dual-functional wireless networks for 6g and beyond,
F. Liu, Y .-F. Liu, A. Li, C. Masouros, and Y . C. Eldar, “Integrated sens- ing and communications: Towards dual-functional wireless networks for 6g and beyond,”IEEE Journal on Selected Areas in Communica- tions, vol. 40, no. 6, pp. 1728–1767, Jun. 2022
2022
-
[51]
Enhancing user localization with an integrated sensing and communication (ISAC) system: An experimental UA V search-and-rescue use case,
S. Moro, F. Linsalata, M. Manzoniet al., “Enhancing user localization with an integrated sensing and communication (ISAC) system: An experimental UA V search-and-rescue use case,”Remote Sens., vol. 16, no. 16, 2024
2024
-
[52]
Advancements in UA V-based integrated sensing and communication: A comprehensive survey,
M. Ahmedet al., “Advancements in UA V-based integrated sensing and communication: A comprehensive survey,”arXiv preprint, vol. arXiv:2501.06526, Jan. 2025, available: arXiv:2501.06526
-
[53]
Deep learning in physical layer communications,
Z. Qinet al., “Deep learning in physical layer communications,”IEEE Wireless Communications, vol. 26, no. 2, pp. 93–99, Apr. 2019
2019
-
[54]
Decentralized resource allocation in UA V communi- cation networks through reward-based multi-agent learning,
Y . Zhanget al., “Decentralized resource allocation in UA V communi- cation networks through reward-based multi-agent learning,”Sci. Rep., 2025
2025
-
[55]
UA V swarms: Research, challenges, and future directions,
Y . Alqudsi and M. Makaraci, “UA V swarms: Research, challenges, and future directions,”J. Eng. Appl. Sci., vol. 72, no. 12, Jan. 2025
2025
-
[56]
Secure 5g-assisted uav access scheme in iobt for region demarcation and surveillance operations,
D. Saraswat, P. Bhattacharya, A. Singh, A. Verma, S. Tanwar, and N. Kumar, “Secure 5g-assisted uav access scheme in iobt for region demarcation and surveillance operations,”IEEE Communications Stan- dards Magazine, vol. 6, no. 1, pp. 58–66, Mar 2022
2022
-
[57]
The internet of battle things: a survey on communication challenges and recent solutions,
R. Kufakunesu, H. C. Myburgh, and A. De Freitas, “The internet of battle things: a survey on communication challenges and recent solutions,”Discover Internet of Things, vol. 5, p. 3,
-
[58]
Available: https://link.springer.com/article/10.1007/ s43926-025-00093-w
[Online]. Available: https://link.springer.com/article/10.1007/ s43926-025-00093-w
-
[59]
Utilizing uavs in wireless networks: Advantages, challenges, objectives, and solution methods,
M. J. Sobouti, A. Mohajerzadeh, H. Y . Adarbah, Z. Rahimi, and H. Ah- madi, “Utilizing uavs in wireless networks: Advantages, challenges, objectives, and solution methods,”Vehicles, vol. 6, no. 4, pp. 1769– 1800, 2024
2024
-
[60]
Uav- assisted 5g/6g networks: Joint scheduling and resource allocation based on asynchronous reinforcement learning,
H. Yang, J. Zhao, J. Nie, N. Kumar, K.-Y . Lam, and Z. Xiong, “Uav- assisted 5g/6g networks: Joint scheduling and resource allocation based on asynchronous reinforcement learning,” inProc. IEEE INFOCOM, 2021
2021
-
[61]
Devising a traffic control method for unmanned aerial vehicles with the use of gnb-iot in 5g,
N. H. Qasim, A. M. Jawad, H. M. Jawad, Y . Khlaponin, and O. Nikitchyn, “Devising a traffic control method for unmanned aerial vehicles with the use of gnb-iot in 5g,”Eastern-European Journal of Enterprise Technologies, vol. 3, no. 9 (117), pp. 53–59, Jun. 2022
2022
-
[62]
A uav-assisted handover scheme for coverage maximization against 5g coverage holes,
H. Jung, E. Rastogi, and J. P. Jeong, “A uav-assisted handover scheme for coverage maximization against 5g coverage holes,” inProc. Int. Conf. on Information and Communication Technology Convergence (ICTC), 2023
2023
-
[63]
Uav-based in- band integrated access and backhaul for 5g communications,
A. Fouda, A. S. Ibrahim, I. Guvenc, and M. Ghosh, “Uav-based in- band integrated access and backhaul for 5g communications,” inProc. IEEE 88th Vehicular Technology Conference (VTC-Fall), Chicago, IL, USA, Aug. 2018, pp. 1–5, available: arXiv:1807.07230
-
[64]
Y . Huo, F. Lu, F. Wu, and X. Dong, “Multi-beam multi-stream communications for 5g and beyond mobile user equipment and uav: Proof of concept designs,” inProc. IEEE 90th Vehicular Technology Conference (VTC-Fall), Honolulu, HI, USA, Sep. 2019, pp. 1–5, available: arXiv:1909.13040
-
[65]
A study on flight route optimization of uav air base station,
Y . Li and S.-C. Kim, “A study on flight route optimization of uav air base station,” in2024 International Conference on Information Networking (ICOIN), Ho Chi Minh City, Vietnam, 2024, pp. 599–602
2024
-
[66]
Edge-prior placement algorithm for uav-mounted base stations,
J. Qin, Z. Wei, C. Qiu, and Z. Feng, “Edge-prior placement algorithm for uav-mounted base stations,” in2019 IEEE Wireless Communica- tions and Networking Conference (WCNC), Marrakesh, Morocco, 2019, pp. 1–6
2019
-
[67]
3d deployment of dynamic uav base station based on mobile users,
F. Lu, Z. Mi, N. Zhao, H. Wang, and Y . Tian, “3d deployment of dynamic uav base station based on mobile users,” in2021 Interna- tional Conference on Advanced Computing and Endogenous Security, Nanjing, China, 2022, pp. 1–5
2022
-
[68]
Research and application of uav-based high-altitude base station in air-heaven network,
H. Yu, T. Cao, S. Zhou, and Y . Huang, “Research and application of uav-based high-altitude base station in air-heaven network,” in2024 4th International Conference on Neural Networks, Information and Communication Engineering (NNICE), Guangzhou, China, 2024, pp. 1770–1775
2024
-
[69]
Research on uav network communication appli- cation based on 5g technology,
L. Cao and H. Wang, “Research on uav network communication appli- cation based on 5g technology,” in2022 3rd International Conference on Electronic Communication and Artificial Intelligence (IWECAI), Zhuhai, China, 2022, pp. 125–129
2022
-
[70]
Analysis of downlink coverage and capacity for 3d mobile uav networks,
Y . Guo, X. Jia, S. Cao, and Z. Hao, “Analysis of downlink coverage and capacity for 3d mobile uav networks,” in2021 7th International Sym- posium on Mechatronics and Industrial Informatics (ISMII), Zhuhai, China, 2021, pp. 236–239
2021
-
[71]
Post-disaster unmanned aerial vehicle base station deployment method based on artificial bee colony algorithm,
J. Li, D. Lu, G. Zhang, J. Tian, and Y . Pang, “Post-disaster unmanned aerial vehicle base station deployment method based on artificial bee colony algorithm,”IEEE Access, vol. 7, pp. 168 327–168 336, 2019
2019
-
[72]
Two-tier uav-based low power wide area networks: A testbed and experimentation study,
S. Sobotet al., “Two-tier uav-based low power wide area networks: A testbed and experimentation study,” in2023 6th Conference on Cloud and Internet of Things (CIoT), Lisbon, Portugal, 2023, pp. 85–90
2023
-
[73]
Lte ground-to-air measurements for uav-assisted cellular networks,
M. C. Batistatos, G. E. Athanasiadou, D. A. Zarbouti, G. V . Tsoulos, and N. C. Sagias, “Lte ground-to-air measurements for uav-assisted cellular networks,” in12th European Conference on Antennas and Propagation (EuCAP 2018), London, UK, 2018, pp. 1–5
2018
-
[74]
User mobility- aware uav-bs placement update with optimal resource allocation,
M. Peer, V . A. Bohara, A. Srivastava, and G. Ghatak, “User mobility- aware uav-bs placement update with optimal resource allocation,”IEEE Open Journal of the Communications Society, vol. 3, pp. 1853–1866, 2022
2022
-
[75]
Deep reinforcement learning- based uav base station deployment for content delivery in cellular iot networks,
Q. Zhu, J. Zheng, and A. Jamalipour, “Deep reinforcement learning- based uav base station deployment for content delivery in cellular iot networks,”IEEE Internet of Things Journal, vol. 12, no. 13, pp. 23 389– 23 401, Jul 2025
2025
-
[76]
Cooperative diversity in wireless networks: Efficient protocols and outage behavior,
J. N. Laneman, D. N. C. Tse, and G. W. Wornell, “Cooperative diversity in wireless networks: Efficient protocols and outage behavior,”IEEE Transactions on Information Theory, vol. 50, no. 12, pp. 3062–3080, Dec. 2004
2004
-
[77]
User cooperation diversity—part i: System description,
A. Sendonaris, E. Erkip, and B. Aazhang, “User cooperation diversity—part i: System description,”IEEE Transactions on Commu- nications, vol. 51, no. 11, pp. 1927–1938, Nov. 2003
1927
-
[78]
Adaptive compress-and-forward relaying in fading environments with or without wyner-ziv coding,
H. H. Sneessens, L. Vandendorpe, and J. N. Laneman, “Adaptive compress-and-forward relaying in fading environments with or without wyner-ziv coding,” in2009 IEEE International Conference on Com- munications, Dresden, Germany, 2009, pp. 1–5
2009
-
[79]
Cooperative diversity in wireless networks: Efficient protocols and outage behavior,
J. N. Laneman, D. N. C. Tse, and G. W. Wornell, “Cooperative diversity in wireless networks: Efficient protocols and outage behavior,”IEEE Transactions on Information Theory, vol. 50, no. 12, pp. 3062–3080, Dec 2004
2004
-
[80]
Demodulate-and-forward relaying with higher order modulations: Impact of channel state uncer- tainty,
R. Annavajjala, A. Maaref, and J. Zhang, “Demodulate-and-forward relaying with higher order modulations: Impact of channel state uncer- tainty,” in2010 IEEE International Conference on Communications, Cape Town, South Africa, 2010, pp. 1–6
2010
-
[81]
Comparing the energy efficiency of single-hop, multi-hop and incremental decode- and-forward in multi-relay wireless sensor networks,
M. T. Kakitani, G. Brante, R. D. Souza, and A. Munaretto, “Comparing the energy efficiency of single-hop, multi-hop and incremental decode- and-forward in multi-relay wireless sensor networks,” inProc. IEEE 22nd International Symposium on Personal, Indoor and Mobile Radio Communications (PIMRC), Toronto, ON, Canada, Sept 2011, pp. 970– 974
2011
-
[82]
Mobile unmanned aerial vehicles (uavs) for energy-efficient internet of things communica- tions,
M. Mozaffari, W. Saad, M. Bennis, and M. Debbah, “Mobile unmanned aerial vehicles (uavs) for energy-efficient internet of things communica- tions,”IEEE Transactions on Wireless Communications, vol. 16, no. 11, pp. 7574–7589, Nov. 2017
2017
-
[83]
Cellular-connected uav: Potential, chal- lenges, and promising technologies,
Y . Zeng, J. Lyu, and R. Zhang, “Cellular-connected uav: Potential, chal- lenges, and promising technologies,”IEEE Wireless Communications, vol. 26, no. 1, pp. 120–127, Feb. 2019
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.