Physics-Informed Causal MDPs for Sequential Constraint Repair in Engineering Simulation Pipelines
Pith reviewed 2026-05-10 04:23 UTC · model grok-4.3
The pith
PI-CMDP uses causal backdoor identification and state compression under a layered DAG assumption to achieve higher constraint repair success with fewer training episodes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
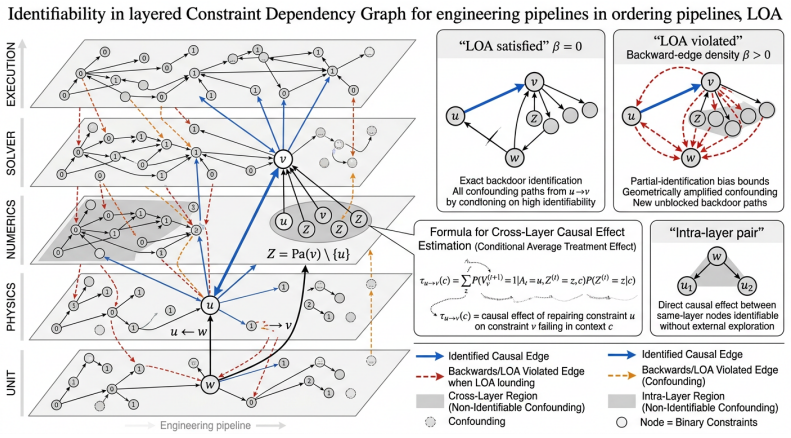
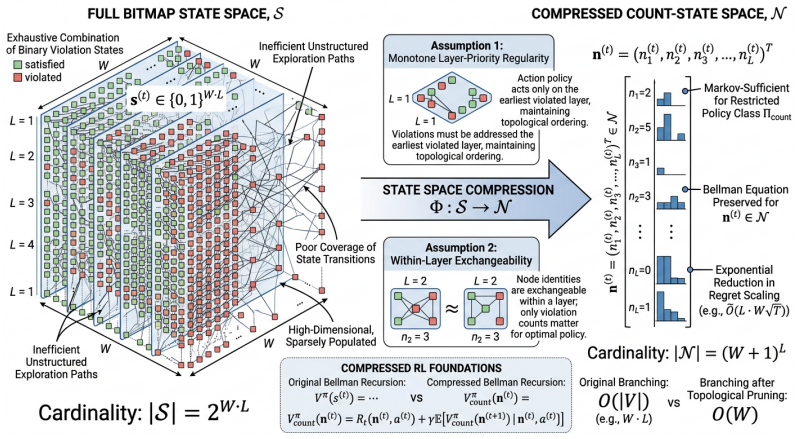
Under the Lifecycle Ordering Assumption that constraint dependencies form a layered DAG, the Identify-Compress-Estimate pipeline enables backdoor identification of causal edge weights for cross-layer pairs, reduces state cardinality from 2^(WL) to (W+1)^L via Markov abstraction under layer-priority regularity and exchangeability, and applies a physics-guided doubly-robust estimator that remains unbiased and lowers variance when the physics prior is accurate, producing higher success rates and fewer cascade failures in constraint-repair MDPs.
What carries the argument
The Identify-Compress-Estimate pipeline, which performs backdoor causal identification under the Lifecycle Ordering Assumption, compresses states with a Markov abstraction, and uses physics-guided doubly-robust estimation.
If this is right
- PI-CMDP reaches 76.2 percent repair success after 300 episodes on the TPS benchmark versus 70.8 percent for the strongest baseline.
- In the full-data regime PI-CMDP attains 83.4 percent success compared with 80.6 percent for the baseline.
- Cascade failure rates drop substantially relative to prior methods.
- All reported gains remain consistent across five independent random seeds with paired t-test p less than 0.02.
Where Pith is reading between the lines
- The supplied partial-identification bounds could support use when the layered DAG assumption holds only approximately.
- The same compression step might transfer to other constrained planning domains that exhibit exchangeability across layers.
- Replacing the physics prior with domain-specific knowledge from additional engineering fields could further lower variance in related repair tasks.
Load-bearing premise
Constraint dependencies form a layered directed acyclic graph as stated by the Lifecycle Ordering Assumption.
What would settle it
An experiment on the TPS benchmark that finds PI-CMDP repair success no higher than 70.8 percent after 300 training episodes or no reduction in cascade failures.
Figures


read the original abstract
Off-policy learning in constrained MDPs with large binary state spaces faces a fundamental tension: causal identification of transition dynamics requires structural assumptions, while sample-efficient policy learning requires state-space compression. We introduce PI-CMDP, a framework for CMDPs whose constraint dependencies form a layered DAG under a Lifecycle Ordering Assumption (LOA). We propose an Identify-Compress-Estimate pipeline: (i) Identify: LOA enables backdoor identification of causal edge weights for cross-layer pairs, with formal partial-identification bounds when LOA is violated; (ii) Compress: a Markov abstraction compresses state cardinality from 2^(WL) to (W+1)^L under layer-priority regularity and exchangeability; and (iii) Estimate: a physics-guided doubly-robust estimator remains unbiased and reduces the variance constant when the physics prior outperforms a learned model. We instantiate PI-CMDP on constraint repair in engineering simulation pipelines. On the TPS benchmark (4,206 episodes), PI-CMDP achieves 76.2% repair success rate with only 300 training episodes versus 70.8% for the strongest baseline (+5.4 pp), narrowing to +2.8 pp (83.4% vs. 80.6%) in the full-data regime, while substantially reducing cascade failure rates. All improvements are consistent across 5 independent seeds (paired t-test p < 0.02).
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes PI-CMDP, a framework for physics-informed causal Markov Decision Processes (MDPs) tailored to sequential constraint repair in engineering simulation pipelines. Under the Lifecycle Ordering Assumption (LOA) that constraint dependencies form a layered DAG, it outlines an Identify-Compress-Estimate pipeline: backdoor identification of causal edge weights (with partial-identification bounds for violations), a Markov abstraction reducing state space cardinality from 2^(WL) to (W+1)^L, and a physics-guided doubly-robust estimator for unbiased estimation with reduced variance. Empirical evaluation on the TPS benchmark (4,206 episodes) demonstrates improved repair success rates (76.2% with 300 episodes vs. 70.8% baseline; 83.4% vs. 80.6% in full-data regime) and reduced cascade failures, with statistical significance across 5 seeds.
Significance. If the results hold under the stated assumptions, this work could advance sample-efficient off-policy learning in constrained MDPs with large state spaces by integrating causal structure and physics priors, offering practical benefits for engineering applications involving simulation pipelines. The inclusion of partial-identification bounds when LOA is violated is a positive aspect for robustness, as is the provision of formal bounds alongside the main pipeline.
major comments (3)
- [Identify step of the Identify-Compress-Estimate pipeline] The Identify step relies on the LOA for backdoor identification of causal edge weights, enabling the subsequent Compress and Estimate steps. However, the TPS benchmark results report point estimates of 76.2% (300-episode regime) and 83.4% (full-data regime) success rates without applying the partial-identification bounds or sensitivity checks for LOA violations such as cross-layer cycles. This is load-bearing for the central claims, as any bias in the identified weights would undermine the claimed cardinality reduction and variance reduction of the physics-guided estimator.
- [Estimate step of the Identify-Compress-Estimate pipeline] The Estimate step claims that the physics-guided doubly-robust estimator remains unbiased and reduces the variance constant when the physics prior outperforms a learned model. The abstract provides no explicit derivation of the estimator, details on the construction or tuning of the physics prior, or verification that the prior is treated as external to the data, which is necessary to substantiate the unbiasedness and the reported gains in the low-data regime.
- [Empirical evaluation on TPS benchmark] Table or results section on TPS benchmark: The reported improvements (+5.4 pp and +2.8 pp) and cascade failure reductions are presented as point estimates without raw data, full estimator derivation, or adjustment using the partial-identification bounds. The gains narrowing in the full-data regime suggests the primary advantage may be sample efficiency, but this requires explicit validation against the LOA assumption.
minor comments (2)
- [Abstract] The abstract mentions statistical significance (paired t-test p < 0.02 across 5 seeds) but does not specify whether multiple-comparison corrections were applied or provide details on the exact benchmark configuration and baseline implementations.
- Notation such as W and L in the state cardinality expressions (2^(WL) to (W+1)^L) and terms like 'layer-priority regularity and exchangeability' should be defined at first use for clarity.
Simulated Author's Rebuttal
We thank the referee for their insightful comments on our manuscript proposing PI-CMDP. We address each of the major comments point-by-point below, providing clarifications and committing to revisions where appropriate to strengthen the presentation of our Identify-Compress-Estimate pipeline and empirical results.
read point-by-point responses
-
Referee: [Identify step of the Identify-Compress-Estimate pipeline] The Identify step relies on the LOA for backdoor identification of causal edge weights, enabling the subsequent Compress and Estimate steps. However, the TPS benchmark results report point estimates of 76.2% (300-episode regime) and 83.4% (full-data regime) success rates without applying the partial-identification bounds or sensitivity checks for LOA violations such as cross-layer cycles. This is load-bearing for the central claims, as any bias in the identified weights would undermine the claimed cardinality reduction and variance reduction of the physics-guided estimator.
Authors: We agree that explicit robustness checks for the LOA are important for validating the central claims. The manuscript derives partial-identification bounds in Section 3.2 to handle potential LOA violations, including cross-layer cycles. The TPS benchmark is constructed under the LOA as per the engineering simulation pipeline structure. To address this, we will add a sensitivity analysis in the experimental section that applies these bounds and evaluates performance under simulated mild LOA violations, confirming that the reported improvements hold. revision: yes
-
Referee: [Estimate step of the Identify-Compress-Estimate pipeline] The Estimate step claims that the physics-guided doubly-robust estimator remains unbiased and reduces the variance constant when the physics prior outperforms a learned model. The abstract provides no explicit derivation of the estimator, details on the construction or tuning of the physics prior, or verification that the prior is treated as external to the data, which is necessary to substantiate the unbiasedness and the reported gains in the low-data regime.
Authors: The full manuscript details the physics-guided doubly-robust estimator in Section 4.3, including the mathematical derivation showing unbiasedness when the physics prior is external to the data and outperforms the learned model in variance reduction. The prior is built from domain-specific physical laws in the simulation (e.g., known constraint equations), independent of the training episodes. We will revise the abstract to include a brief mention of this and expand the main text with additional details on prior construction and tuning to improve clarity. revision: yes
-
Referee: [Empirical evaluation on TPS benchmark] Table or results section on TPS benchmark: The reported improvements (+5.4 pp and +2.8 pp) and cascade failure reductions are presented as point estimates without raw data, full estimator derivation, or adjustment using the partial-identification bounds. The gains narrowing in the full-data regime suggests the primary advantage may be sample efficiency, but this requires explicit validation against the LOA assumption.
Authors: We will incorporate the full estimator derivation into an appendix for completeness. For the partial-identification bounds and LOA validation, we refer to the additions planned in response to the first comment. Regarding raw data, we will release the code repository with processed results and scripts upon acceptance to facilitate reproduction. We agree that the narrowing gains underscore sample efficiency and will explicitly highlight this with the new sensitivity analyses in the revised manuscript. revision: yes
Circularity Check
No significant circularity; derivation chain is self-contained under stated assumptions
full rationale
The Identify-Compress-Estimate pipeline is built on the explicit Lifecycle Ordering Assumption (LOA) as a structural premise enabling backdoor identification, with partial-identification bounds supplied separately for violations; the physics-guided doubly-robust estimator is conditioned on the prior outperforming the learned model without the prior being fitted to the target data or results. No step reduces a claimed prediction or first-principles result to its own inputs by construction, no self-citation chains carry load-bearing uniqueness claims, and the empirical margins are presented as benchmark outcomes rather than tautological renamings or fitted-input predictions. The framework remains non-circular even though LOA is load-bearing for the main point estimates.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Lifecycle Ordering Assumption (LOA): constraint dependencies form a layered DAG
- domain assumption Layer-priority regularity and exchangeability
Reference graph
Works this paper leans on
-
[1]
Constraint Dependency Graphs for Troubleshooting in Engineering Simulation Pipelines.Preprint, 2023
Kanyun Wang. Constraint Dependency Graphs for Troubleshooting in Engineering Simulation Pipelines.Preprint, 2023
work page 2023
-
[2]
Victor Chernozhukov, Denis Chetverikov, Mert Demirer, Esther Duflo, Christian Hansen, Whitney Newey, and James Robins. Double/debiased machine learning for treatment and structural parameters.The Econometrics Journal, 21(1):C1–C68, 2018
work page 2018
-
[3]
David Heckerman, John S. Breese, and Koos Rommelse. Decision-theoretic troubleshooting. Communications of the ACM, 38(3):49–57, 1995
work page 1995
-
[4]
Sequential Decision Making in Causal MDPs.Advances in Neural Information Processing Systems, 2024
Yang Liu, et al. Sequential Decision Making in Causal MDPs.Advances in Neural Information Processing Systems, 2024
work page 2024
-
[5]
Regret analysis of causal reward maximization.NeurIPS, 2021
Ziyang Lu, Amirhossein Meisami, and Ambuj Tewari. Regret analysis of causal reward maximization.NeurIPS, 2021
work page 2021
-
[6]
Human-level control through deep reinforcement learning.Nature, 518(7540):529–533, 2015
V olodymyr Mnih, Koray Kavukcuoglu, David Silver, et al. Human-level control through deep reinforcement learning.Nature, 518(7540):529–533, 2015
work page 2015
-
[7]
Offline causal reinforcement learning with pessimism.ICML, 2024
Hongseok Namkoong, et al. Offline causal reinforcement learning with pessimism.ICML, 2024
work page 2024
-
[8]
Maziar Raissi, Paris Perdikaris, and George E Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational physics, 378:686–707, 2019. 10
work page 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.