Recognition: unknown
Peeling Rotten Potatoes for a Faster Approximation of Convex Cover
Pith reviewed 2026-05-10 03:42 UTC · model grok-4.3
The pith
Discretizing the convex cover problem into set cover lets a greedy algorithm find large convex pieces quickly via maximum paths in visibility DAGs, keeping the O(log n) approximation but with much lower running time.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
By discretizing the input polygon into regions and modeling convex-piece selection as a set-cover problem, the greedy algorithm can be implemented efficiently. The key subproblem of selecting the convex polygon covering the maximum number of uncovered regions is solved by constructing DAGs that represent visibility polygons and finding maximum weighted paths in them, with constraints to control complexity. This approach maintains the O(log n) approximation factor of the set cover greedy while reducing the running time from O(n^29 log n) to something substantially better.
What carries the argument
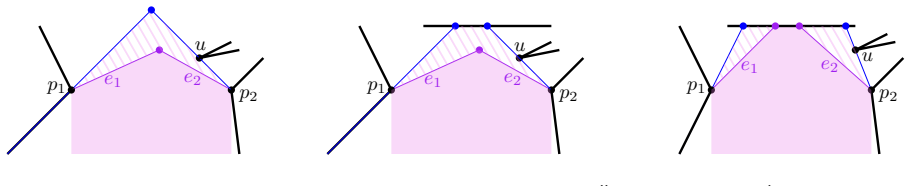
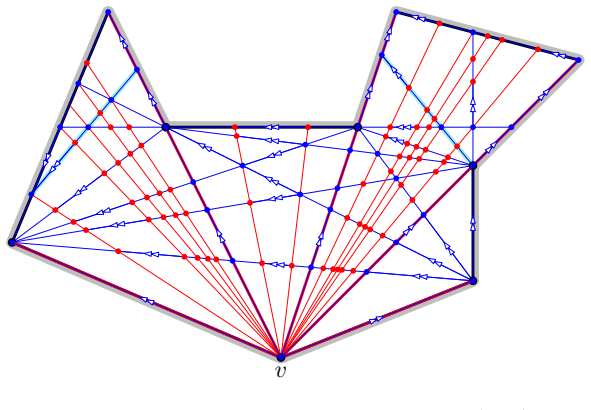
The rotten potato peeling problem solved by maximum weighted paths in constrained DAGs built from visibility polygons.
If this is right
- The O(log n) approximation for minimum convex cover runs in substantially less than O(n^29 log n) time.
- The same DAG-path technique for the rotten potato peeling variant may be reusable in other geometric covering problems.
- Discretization into regions allows the greedy selection step to remain efficient without sacrificing the proven approximation ratio.
Where Pith is reading between the lines
- If the DAG construction remains polynomial for realistic polygon sizes, the method could become practical for computational-geometry libraries.
- Similar visibility-to-DAG reductions might improve approximation algorithms for related problems such as minimum convex decomposition or art-gallery variants.
- The constrained DAG approach could generalize to other visibility-constrained optimization tasks in motion planning or sensor coverage.
Load-bearing premise
The discretization into regions and the constrained DAG construction for visibility polygons preserve both the O(log n) approximation factor and correctness of the greedy set-cover step without introducing hidden exponential factors or missing optimal convex pieces.
What would settle it
A concrete polygon where the maximum-weight path found in the constructed DAG selects a convex piece that covers strictly fewer regions than some other valid convex piece inside P would cover.
Figures

read the original abstract
The minimum convex cover problem seeks to cover a polygon $P$ with the fewest convex polygons that lie within $P$. This problem is $\exists\mathbb R$-complete, and the best previously known algorithm, due to Eidenbenz and Widmayer (2001), achieves an $O(\log n)$-approximation in $O(n^{29} \log n)$ time, where $n$ is the complexity of $P$. In this work we present a novel approach that preserves the $O(\log n)$ approximation guarantee while significantly reducing the running time. By discretizing the problem and formulating it as a set cover problem, we focus on efficiently finding a convex polygon that covers the largest number of uncovered regions, in each iteration of the greedy algorithm. This core subproblem, which we call the rotten potato peeling problem, is a variant of the classic potato peeling problem. We solve it by finding maximum weighted paths in Directed Acyclic Graphs (DAGs) that correspond to visibility polygons, with the DAG construction carefully constrained to manage complexity. Our approach yields a substantial improvement in the overall running time and introduces techniques that may be of independent interest for other geometric covering problems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims an improved O(log n)-approximation algorithm for the minimum convex cover problem on a polygon P of complexity n. It discretizes P into regions, reduces the problem to a set-cover instance, and solves each greedy iteration's core subproblem (the 'rotten potato peeling problem,' a variant of potato peeling) by computing a maximum-weight path in a carefully constrained DAG whose paths correspond to visibility polygons; this is asserted to yield a substantial reduction in running time relative to the prior O(n^{29} log n) bound of Eidenbenz and Widmayer while preserving the approximation ratio.
Significance. If the discretization produces a faithful set-cover instance and the constrained DAG exactly solves the maximum-coverage convex subproblem without excluding superior candidates, the result would be a meaningful practical advance in computational geometry, rendering O(log n)-approximate convex covers feasible for larger polygons and supplying a reusable technique for visibility-based covering problems.
major comments (2)
- [Abstract and rotten potato peeling section] Abstract (and the section describing the rotten potato peeling problem): the claim that maximum-weight paths in the constrained DAG solve the subproblem exactly (i.e., identify a convex polygon covering the largest number of uncovered regions) is load-bearing for both correctness and the O(log n) guarantee. No argument is supplied that every candidate convex polygon is represented by some path or that excluded polygons cannot cover more regions than retained paths; if any superior convex piece is omitted, the greedy selection becomes suboptimal for the discretized instance and the standard set-cover analysis fails to transfer.
- [Abstract and complexity analysis] Abstract (and the complexity discussion): the manuscript asserts a 'substantial improvement in the overall running time' but supplies neither an explicit complexity bound for the DAG construction nor an analysis showing that the discretization and path enumeration introduce no hidden exponential factors. This information is required to substantiate the claimed speedup and to confirm that the algorithm remains polynomial.
minor comments (1)
- [Abstract] The abstract would benefit from stating the new running-time bound explicitly rather than describing it only as a 'substantial improvement.'
Simulated Author's Rebuttal
We thank the referee for the thorough review and for identifying two critical points that require clarification and expansion in the manuscript. We address each major comment below and will incorporate the necessary additions and proofs in the revised version.
read point-by-point responses
-
Referee: [Abstract and rotten potato peeling section] Abstract (and the section describing the rotten potato peeling problem): the claim that maximum-weight paths in the constrained DAG solve the subproblem exactly (i.e., identify a convex polygon covering the largest number of uncovered regions) is load-bearing for both correctness and the O(log n) guarantee. No argument is supplied that every candidate convex polygon is represented by some path or that excluded polygons cannot cover more regions than retained paths; if any superior convex piece is omitted, the greedy selection becomes suboptimal for the discretized instance and the standard set-cover analysis fails to transfer.
Authors: We agree that the manuscript must supply a formal argument showing that the constrained DAG captures every feasible convex polygon (or at least that its maximum-weight path yields the optimal coverage for the discretized regions). The current text asserts that paths correspond to visibility polygons but does not contain an explicit lemma proving completeness or optimality. In the revision we will insert a new lemma (with proof) in the rotten-potato-peeling section establishing that (i) every convex polygon inside P that covers a subset of the regions corresponds to at least one path in the DAG and (ii) no convex polygon outside the DAG can cover strictly more regions than the maximum-weight path. This will restore the exactness of the greedy step and preserve the O(log n) set-cover guarantee. revision: yes
-
Referee: [Abstract and complexity analysis] Abstract (and the complexity discussion): the manuscript asserts a 'substantial improvement in the overall running time' but supplies neither an explicit complexity bound for the DAG construction nor an analysis showing that the discretization and path enumeration introduce no hidden exponential factors. This information is required to substantiate the claimed speedup and to confirm that the algorithm remains polynomial.
Authors: We acknowledge that the present version provides neither an explicit big-O bound for the DAG construction nor a complete accounting of the discretization size and path-finding cost. The abstract claims a substantial improvement over the prior O(n^{29} log n) algorithm, yet without the supporting analysis it is impossible to verify polynomiality or the absence of exponential blow-up. In the revision we will add a dedicated complexity subsection that (a) bounds the number of regions produced by the discretization, (b) shows the visibility DAG has polynomial size (with a concrete exponent), and (c) proves that a maximum-weight path can be computed in polynomial time via dynamic programming. The resulting overall running time will be stated explicitly and shown to be polynomial and asymptotically faster than the Eidenbenz-Widmayer bound. revision: yes
Circularity Check
No circularity: algorithmic discretization and DAG reduction are constructive
full rationale
The paper's core contribution is a discretization of the minimum convex cover problem into a set-cover instance, followed by an explicit graph-theoretic algorithm (maximum-weight paths in constrained DAGs on visibility polygons) to solve the greedy subproblem exactly. This chain is self-contained as a reduction to a solvable combinatorial problem; the O(log n) guarantee is inherited from the standard greedy set-cover analysis once the subproblem is solved, without any parameter fitting, self-definitional equations, or load-bearing self-citations that collapse the claimed result back to its inputs. No quoted step equates a derived quantity to a fitted or renamed input by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math Visibility polygons and their corresponding DAGs can be constructed in polynomial time with bounded complexity.
- domain assumption The discretization into regions preserves the optimal convex cover structure up to the O(log n) factor.
invented entities (1)
-
rotten potato peeling problem
no independent evidence
Reference graph
Works this paper leans on
-
[1]
Abrahamsen
M. Abrahamsen. Covering polygons is even harder. InProceedings of the 62nd IEEE Symposium on Foundations of Computer Science (FOCS), pages 124–135. IEEE Computer Society, 2021. 1
2021
-
[2]
Aronov, M
B. Aronov, M. Van Kreveld, M. L¨ offler, and R. I. Silveira. Peeling meshed potatoes.Algorithmica, 60(2):349–367, 2011. 2
2011
-
[3]
Browne, P
R. Browne, P. N. Kasthurirangan, J. S. Mitchell, and V. Polishchuk. Constant-factor approxi- mation algorithms for convex cover and hidden set in a simple polygon. In2023 IEEE 64th Annual Symposium on Foundations of Computer Science (FOCS), pages 1357–1365. IEEE,
-
[4]
Chang and C.-K
J.-S. Chang and C.-K. Yap. A polynomial solution for the potato-peeling problem.Discrete & Computational Geometry, 1(2):155–182, 1986. 2
1986
-
[5]
L. Crombez, G. D. da Fonseca, and Y. G´ erard. Peeling digital potatoes.arXiv preprint arXiv:1812.05410, 2018. 2
-
[6]
Culberson and R
J. Culberson and R. Reckhow. Covering polygons is hard. In[Proceedings 1988] 29th Annual Symposium on Foundations of Computer Science, pages 601–611, 1988. 1
1988
-
[7]
De Berg, O
M. De Berg, O. Cheong, M. Van Kreveld, and M. Overmars.Computational geometry: algorithms and applications. Springer, 2008. 8
2008
-
[8]
Eidenbenz and P
S. Eidenbenz and P. Widmayer. An approximation algorithm for minimum convex cover with logarithmic performance guarantee. InEuropean Symposium on Algorithms, pages 333–344. Springer, 2001. 1, 4, 5, 12
2001
- [9]
-
[10]
J. E. Goodman. On the largest convex polygon contained in a non-convex n-gon, or how to peel a potato.Geometriae Dedicata, 11(1):99–106, 1981. 2
1981
-
[11]
Hall-Holt, M
O. Hall-Holt, M. J. Katz, P. Kumar, J. S. Mitchell, and A. Sityon. Finding large sticks and potatoes in polygons. InSoda, volume 6, pages 474–483, 2006. 2
2006
-
[12]
Noltemeier
H. Noltemeier. An algorithm for the determination of longest distances in a graph.Mathematical Programming, 9:350–357, 1975. 9
1975
-
[13]
O’Rourke and K
J. O’Rourke and K. Supowit. Some np-hard polygon decomposition problems.IEEE Transac- tions on Information Theory, 29(2):181–190, 1983. 1 13
1983
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.