Recognition: unknown
RoomRecon: High-Quality Textured Room Layout Reconstruction on Mobile Devices
Pith reviewed 2026-05-10 03:02 UTC · model grok-4.3
The pith
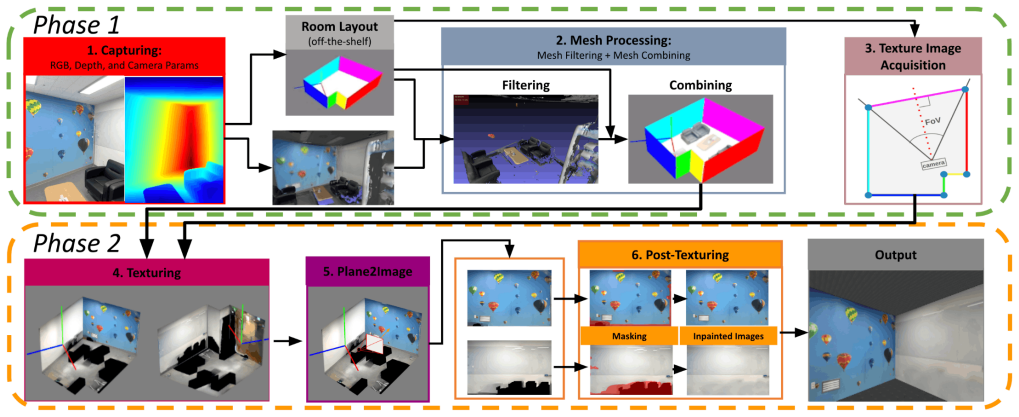
RoomRecon uses AR-guided image capture and generative AI in a two-phase pipeline to texture 3D room models on mobile devices while focusing only on permanent elements.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
RoomRecon introduces an interactive real-time scanning and texturing pipeline for 3D room models that integrates AR-guided image capturing with generative AI models in a two-phase texturing pipeline, while focusing on permanent room elements such as walls, floors, and ceilings to enable customizable models, and demonstrates through quantitative results and user studies that it surpasses state-of-the-art methods in texturing quality and on-device computation time.
What carries the argument
The two-phase texturing pipeline that combines AR-guided image capturing for texturing and generative AI models, restricted to permanent room elements.
If this is right
- 3D room models become updatable without full recapture because textures attach only to the stable permanent structure.
- VR and XR applications gain more realistic indoor replicas from the improved texturing quality.
- Interior design and real estate workflows benefit from models that separate fixed architecture from movable items for quick edits.
- Real-time mobile execution lowers the hardware requirements compared with cloud-dependent or high-end workstation methods.
- Semantic scene understanding advances by isolating permanent elements as the focus of texturing.
Where Pith is reading between the lines
- If the pipeline maintains quality across rooms, consumer devices could support on-the-spot indoor mapping without professional equipment or cloud uploads.
- Customizable permanent-element models would let users test furniture arrangements in VR while the base textured shell remains unchanged.
- Advancing generative AI models could further reduce artifacts in the texturing step, widening the range of usable lighting conditions.
- The mobile emphasis suggests the method could combine with everyday phone cameras for broad adoption in home renovation planning.
Load-bearing premise
The two-phase texturing pipeline that integrates AR-guided image capturing and generative AI models will reliably improve texturing quality and enable easy customization by focusing only on permanent room elements across varied indoor spaces.
What would settle it
A controlled comparison on the same set of rooms where RoomRecon receives lower user preference scores or worse texture quality metrics than a baseline method when lighting varies or occlusions increase.
Figures




















read the original abstract
Widespread RGB-Depth (RGB-D) sensors and advanced 3D reconstruction technologies facilitate the capture of indoor spaces, improving the fields of augmented reality (AR), virtual reality (VR), and extended reality (XR). Nevertheless, current technologies still face limitations, such as the inability to reflect minor scene changes without a complete recapture, the lack of semantic scene understanding, and various texturing challenges that affect the 3D model's visual quality. These issues affect the realism required for VR experiences and other applications such as in interior design and real estate. To address these challenges, we introduce RoomRecon, an interactive, real-time scanning and texturing pipeline for 3D room models. We propose a two-phase texturing pipeline that integrates AR-guided image capturing for texturing and generative AI models to improve texturing quality and provide better replicas of indoor spaces. Moreover, we suggest focusing only on permanent room elements such as walls, floors, and ceilings, to allow for easily customizable 3D models. We conduct experiments in a variety of indoor spaces to assess the texturing quality and speed of our method. The quantitative results and user study demonstrate that RoomRecon surpasses state-of-the-art methods in terms of texturing quality and on-device computation time.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces RoomRecon, an interactive real-time scanning and texturing pipeline for 3D room models on mobile devices. It proposes a two-phase texturing approach that integrates AR-guided image capturing with generative AI models to improve texturing quality, while focusing only on permanent room elements (walls, floors, ceilings) to enable easy customization. Experiments across varied indoor spaces and a user study are presented to claim that RoomRecon surpasses state-of-the-art methods in texturing quality and on-device computation time.
Significance. If the on-device deployment and quantitative claims are substantiated, the work could advance practical mobile AR/VR and interior design applications by addressing limitations in current RGB-D reconstruction such as handling minor changes and achieving high visual quality without full recaptures. The focus on permanent elements for customizability is a pragmatic contribution.
major comments (2)
- [Abstract] Abstract: The central claim that 'the quantitative results and user study demonstrate that RoomRecon surpasses state-of-the-art methods in terms of texturing quality and on-device computation time' is unsupported because the abstract (and available text) supplies no specific metrics, error analysis, dataset descriptions, baseline methods, or statistical details from the experiments. Without these, the evidence cannot be evaluated for soundness.
- [Abstract] Abstract (two-phase texturing pipeline): The superiority in on-device computation time is load-bearing for the main claim, yet the integration of generative AI models for texturing raises a deployment concern. Generative models are typically resource-intensive; if the AI stage runs off-device or post hoc rather than fully on-device during real-time scanning, the reported on-device times would only cover the AR-guided capture phase, making the SOTA comparison non-equivalent and undermining the time-quality superiority assertion.
minor comments (1)
- [Abstract] Abstract: The phrase 'various texturing challenges that affect the 3D model's visual quality' is vague; specifying the exact challenges (e.g., lighting inconsistencies, occlusion handling) would improve context without altering the core contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment point by point below, providing clarifications and indicating where revisions will be made to strengthen the presentation of our claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'the quantitative results and user study demonstrate that RoomRecon surpasses state-of-the-art methods in terms of texturing quality and on-device computation time' is unsupported because the abstract (and available text) supplies no specific metrics, error analysis, dataset descriptions, baseline methods, or statistical details from the experiments. Without these, the evidence cannot be evaluated for soundness.
Authors: We acknowledge that the abstract functions as a concise summary and therefore omits the detailed metrics, error analyses, dataset descriptions, baseline comparisons, and statistical details that are provided in the full manuscript (including the experimental sections describing varied indoor spaces, quantitative texturing quality metrics, timing benchmarks, and user study results). To address this concern and make the abstract more self-contained while preserving its brevity, we will revise the abstract in the next version to incorporate representative quantitative highlights from our results without altering the core claims. revision: yes
-
Referee: [Abstract] Abstract (two-phase texturing pipeline): The superiority in on-device computation time is load-bearing for the main claim, yet the integration of generative AI models for texturing raises a deployment concern. Generative models are typically resource-intensive; if the AI stage runs off-device or post hoc rather than fully on-device during real-time scanning, the reported on-device times would only cover the AR-guided capture phase, making the SOTA comparison non-equivalent and undermining the time-quality superiority assertion.
Authors: We thank the referee for highlighting this potential ambiguity. The RoomRecon pipeline is designed such that both phases—including the generative AI texturing components—are executed on-device in real time on mobile hardware. The generative models are optimized for mobile deployment to support the reported end-to-end on-device computation times, which encompass the full pipeline rather than only the AR-guided capture phase. To eliminate any ambiguity and strengthen the equivalence of our SOTA comparisons, we will add explicit clarification and implementation details on the on-device optimizations in the revised manuscript. revision: yes
Circularity Check
No circularity in engineering pipeline and empirical evaluation
full rationale
The paper describes a two-phase texturing pipeline for room reconstruction using AR-guided capture and generative AI, evaluated via experiments across indoor spaces, quantitative metrics, and a user study against external SOTA methods. No equations, mathematical derivations, fitted parameters renamed as predictions, or self-citation chains appear in the provided claims. The central results rest on direct comparisons to independent benchmarks rather than reducing to self-defined inputs or ansatzes by construction, rendering the work self-contained against external evaluation.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Generative AI models can be integrated with AR-guided capture to produce higher-quality textures for 3D room models than existing methods
Reference graph
Works this paper leans on
-
[1]
Official Adobe Photoshop - Photo & Design Software — adobe.com.https://www.adobe.com/products/photoshop
Adobe. Official Adobe Photoshop - Photo & Design Software — adobe.com.https://www.adobe.com/products/photoshop. html. [Accessed 07-05-2024]. 2, 5, 6
2024
-
[2]
A. Andrew. Another efficient algorithm for convex hulls in two di- mensions.Information Processing Letters, 9(5):216–219, dec 1979. doi: 10.1016/0020-0190(79)90072-3 3, 11, 21
-
[3]
M. V . Anglada. An improved incremental algorithm for construct- ing restricted Delaunay triangulations.Computers & Graphics, 21(2):215–223, mar 1997. Graphics Hardware. doi: 10.1016/S0097 -8493(96)00085-4 3, 21
-
[4]
ARKit 6 - Augmented Reality - Apple Devel- oper — developer.apple.com.https://developer.apple.com/ augmented-reality/arkit/
Apple Inc. ARKit 6 - Augmented Reality - Apple Devel- oper — developer.apple.com.https://developer.apple.com/ augmented-reality/arkit/. [Accessed 07-05-2024]. 1, 3, 5, 6, 12
2024
-
[5]
RoomPlan - Augmented Reality - Apple Devel- oper — developer.apple.com.https://developer.apple.com/ augmented-reality/roomplan/
Apple Inc. RoomPlan - Augmented Reality - Apple Devel- oper — developer.apple.com.https://developer.apple.com/ augmented-reality/roomplan/. [Accessed 07-05-2024]. 2, 5
2024
-
[6]
Avetisyan, T
A. Avetisyan, T. Khanova, C. Choy, D. Dash, A. Dai, and M. Nießner. SceneCad: Predicting Object Alignments and Layouts in RGB-D Scans. InProc. ECCV. Springer Nature, Berlin, Germany, August
-
[7]
S. Bi, N. K. Kalantari, and R. Ramamoorthi. Patch-based optimiza- tion for image-based texture mapping.ACM Trans. Graph., 36(4), jul
-
[8]
doi: 10.1145/3072959.3073610 1
-
[9]
C. Cao, Q. Dong, and Y . Fu. Zits++: Image inpainting by improving the incremental transformer on structural priors.IEEE Transactions on Pattern Analysis and Machine Intelligence, 45(10):12667–12684, oct 2023. doi: 10.1109/TPAMI.2023.3280222 5, 13
- [10]
-
[11]
P. Cipresso, I. A. C. Giglioli, M. A. Raya, and G. Riva. The Past, Present, and Future of Virtual and Augmented Reality Research: A Network and Cluster Analysis of the Literature.Frontiers in Psychol- ogy, 9, nov 2018. doi: 10.3389/fpsyg.2018.02086 1
-
[12]
F. Crete, T. Dolmiere, P. Ladret, and M. Nicolas. The blur effect: per- ception and estimation with a new no-reference perceptual blur metric. In B. E. Rogowitz, T. N. Pappas, and S. J. Daly, eds.,Human Vision and Electronic Imaging XII, vol. 6492, p. 64920I. International Soci- ety for Optics and Photonics, SPIE, California, USA, mar 2007. doi: 10.1117/1...
-
[13]
A. Dai, M. Nießner, M. Zollh ¨ofer, S. Izadi, and C. Theobalt. Bundle- Fusion: Real-Time Globally Consistent 3D Reconstruction Using On- the-Fly Surface Reintegration.ACM Transactions on Graphics (TOG), 36(3), may 2017. doi: 10.1145/3054739 1
-
[14]
Q. Dong, C. Cao, and Y . Fu. Incremental transformer structure en- hanced image inpainting with masking positional encoding. InProc. CVPR, pp. 11348–11358. IEEE Computer Society, Los Alamitos, CA, USA, jun 2022. doi: 10.1109/CVPR52688.2022.01107 2, 5, 6, 7, 13, 14
-
[15]
H. Fu, R. Jia, L. Gao, M. Gong, B. Zhao, S. Maybank, and D. Tao. 3D-FUTURE: 3D Furniture Shape with TextURE.International Jour- nal of Computer Vision, 129(12):3313–3337, dec 2021. doi: 10.1007/ s11263-021-01534-z 2
2021
-
[16]
Y . Fu, Q. Yan, J. Liao, H. Zhou, J. Tang, and C. Xiao. Seamless texture optimization for rgb-d reconstruction.IEEE Transactions on Visualization & Computer Graphics, 29(03):1845–1859, mar 2023. doi: 10.1109/TVCG.2021.3134105 1, 2, 3, 4, 5, 6, 7, 8, 12, 22, 23
- [17]
-
[18]
H.-a. Gao, B. Tian, P. Li, X. Chen, H. Zhao, G. Zhou, Y . Chen, and H. Zha. From Semi-supervised to Omni-supervised Room Layout Es- timation Using Point Clouds. InProc. ICRA, pp. 2803–2810. Institute of Electrical and Electronics Engineers (IEEE), New Jersey, United States, 2023. doi: 10.1109/ICRA48891.2023.10161273 2
-
[19]
M. Garland and P. S. Heckbert. Surface simplification using quadric error metrics. InProceedings of the 24th Annual Conference on Computer Graphics and Interactive Techniques, SIGGRAPH ’97, p. 209–216. ACM Press/Addison-Wesley Publishing Co., New York, USA, 1997. doi: 10.1145/258734.258849 5
-
[20]
Ghildyal and F
A. Ghildyal and F. Liu. Shift-Tolerant Perceptual Similarity Metric. In Proc. ECCV, pp. 91–107. Springer Nature, Cham, Switzerland, 2022. 6
2022
-
[21]
Goodfellow, J
I. Goodfellow, J. Pouget-Abadie, M. Mirza, B. Xu, D. Warde-Farley, S. Ozair, A. Courville, and Y . Bengio. Generative adversarial net- works.Commun. ACM, 63(11):139–144, oct 2020. doi: 10.1145/ 3422622 2
2020
-
[22]
Build new augmented reality experiences that seam- lessly blend the digital and physical worlds — ARCore — Google for Developers — developers.google.com.https://developers
Google Inc. Build new augmented reality experiences that seam- lessly blend the digital and physical worlds — ARCore — Google for Developers — developers.google.com.https://developers. google.com/ar. [Accessed 07-05-2024]. 1
2024
-
[23]
H ¨ollein, A
L. H ¨ollein, A. Cao, A. Owens, J. Johnson, and M. Nießner. Text2Room: Extracting Textured 3D Meshes from 2D Text-to-Image Models. InProc. ICCV, pp. 7909–7920. Institute of Electrical and Electronics Engineers (IEEE), New Jersey, United States, October
-
[24]
In: 2020 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp
J. Huang, J. Thies, A. Dai, A. Kundu, C. Jiang, L. J. Guibas, M. Niess- ner, and T. Funkhouser. Adversarial Texture Optimization From RGB- D Scans. InProc. CVPR, pp. 1556–1565. IEEE Computer Society, Los Alamitos, CA, USA, jun 2020. doi: 10.1109/CVPR42600.2020. 00163 2
-
[25]
E. Karaca and M. A. Tunga. Interpolation-based image inpainting in color images using high dimensional model representation. In2016 24th European Signal Processing Conference (EUSIPCO), pp. 2425– 2429, 2016. doi: 10.1109/EUSIPCO.2016.7760684 2
-
[26]
W. Li, Z. Lin, K. Zhou, L. Qi, Y . Wang, and J. Jia. Mat: Mask- aware transformer for large hole image inpainting. InProc. CVPR, pp. 10748–10758. IEEE Computer Society, Los Alamitos, CA, USA, jun 2022. doi: 10.1109/CVPR52688.2022.01049 2, 5, 14
-
[27]
K. Maninis, S. Popov, M. Niesner, and V . Ferrari. Vid2CAD: CAD Model Alignment Using Multi-View Constraints From Videos. IEEE Transactions on Pattern Analysis and Machine Intelligence, 45(01):1320–1327, jan 2023. doi: 10.1109/TPAMI.2022.3146082 2
-
[28]
Metal Overview - Apple Developer — developer.apple.com
Metal. Metal Overview - Apple Developer — developer.apple.com. https://developer.apple.com/metal/. [Accessed 07-05- 2024]. 4, 5
2024
-
[29]
R. A. Newcombe, A. Fitzgibbon, S. Izadi, O. Hilliges, D. Molyneaux, D. Kim, A. J. Davison, P. Kohi, J. Shotton, and S. Hodges. KinectFu- sion: Real-time dense surface mapping and tracking. InProc. ISMAR, pp. 127–136. IEEE Computer Society, Los Alamitos, CA, USA, oct
-
[30]
doi: 10.1109/ISMAR.2011.6092378 1, 3
-
[31]
Dall·e 3.https://openai.com/index/dall-e-3
OpenAI. Dall·e 3.https://openai.com/index/dall-e-3. [Ac- cessed 07-05-2024]. 2, 5
2024
-
[32]
M. Portman, A. Natapov, and D. Fisher-Gewirtzman. To go where no man has gone before: Virtual reality in architecture, landscape ar- chitecture and environmental planning.Computers, Environment and Urban Systems, 54:376–384, 06 2015. doi: 10.1016/j.compenvurbsys .2015.05.001 1
-
[33]
Z. Qin, Q. Zeng, Y . Zong, and F. Xu. Image inpainting based on deep learning: A review.Displays, 69:102028, 2021. doi: 10.1016/j.displa .2021.102028 2
-
[34]
In: 2022 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pp
R. Rombach, A. Blattmann, D. Lorenz, P. Esser, and B. Ommer. High- resolution image synthesis with latent diffusion models. InProc. CVPR, pp. 10674–10685. IEEE Computer Society, Los Alamitos, CA, USA, jun 2022. doi: 10.1109/CVPR52688.2022.01042 2, 5
-
[35]
Schult, S
J. Schult, S. Tsai, L. H ¨ollein, B. Wu, J. Wang, C.-Y . Ma, K. Li, X. Wang, F. Wimbauer, Z. He, P. Zhang, B. Leibe, P. Vajda, and J. Hou. ControlRoom3D: Room Generation using Semantic Proxy Rooms. InProc. CVPR. Institute of Electrical and Electronics Engi- neers (IEEE), New Jersey, United States, 2024. 1, 2
2024
-
[36]
L. Song, L. Cao, H. Xu, K. Kang, F. Tang, J. Yuan, and Z. Yang. RoomDreamer: Text-Driven 3D Indoor Scene Synthesis with Coher- ent Geometry and Texture. InProceedings of the 31st ACM Interna- tional Conference on Multimedia, MM ’23, p. 6898–6906. Associa- tion for Computing Machinery, New York, NY , USA, 2023. doi: 10. 1145/3581783.3611800 1, 2
-
[37]
Dn-splatter: Depth and normal priors for gaussian splatting and meshing
R. Suvorov, E. Logacheva, A. Mashikhin, A. Remizova, A. Ashukha, A. Silvestrov, N. Kong, H. Goka, K. Park, and V . Lempitsky. Resolution-robust large mask inpainting with fourier convolutions. In Proc. WACV, pp. 3172–3182. IEEE Computer Society, Los Alamitos, CA, USA, jan 2022. doi: 10.1109/W ACV51458.2022.00323 2, 5, 14
work page doi:10.1109/w 2022
-
[38]
Vartanian, G
O. Vartanian, G. Navarrete, A. Chatterjee, L. B. Fich, J. L. Gonzalez- Mora, H. Leder, C. Modro ˜no, M. Nadal, N. Rostrup, and M. Skov. Architectural design and the brain: Effects of ceiling height and per- ceived enclosure on beauty judgments and approach-avoidance deci- sions.Journal of Environmental Psychology, 41:10–18, 2015. doi: 10 .1016/j.jenvp.201...
2015
-
[39]
Waechter, N
M. Waechter, N. Moehrle, and M. Goesele. Let There Be Color! Large-Scale Texturing of 3D Reconstructions. InProc. ECCV, pp. 836–850. Springer International Publishing, Berlin, Germany, 2014. 1, 2, 3, 4, 5, 6, 7, 12, 21, 22, 23
2014
-
[40]
Wang and X
C. Wang and X. Guo. Plane-Based Optimization of Geometry and Texture for RGB-D Reconstruction of Indoor Scenes. InProc. 3DV, pp. 533–541. IEEE Computer Society, Los Alamitos, CA, USA, sep
-
[41]
doi: 10.1109/3DV.2018.00067 2, 5, 6, 8, 22, 23
-
[42]
Z. Wang, A. Bovik, H. Sheikh, and E. Simoncelli. Image quality as- sessment: from error visibility to structural similarity.IEEE Transac- tions on Image Processing, 13(4):600–612, 2004. doi: 10.1109/TIP. 2003.819861 6
work page doi:10.1109/tip 2004
-
[43]
Weerasinghe, K
M. Weerasinghe, K. ˇCopiˇc Pucihar, J. Ducasse, A. Quigley, A. To- niolo, A. Miguel, N. Caluya, and M. Kljun. Exploring the future building: representational effects on projecting oneself into the fu- ture office space.Virtual Reality, 27(1):51–70, Mar 2023. doi: 10. 1007/s10055-022-00673-z 1
2023
-
[44]
T. Whelan, R. F. Salas-Moreno, B. Glocker, A. J. Davison, and S. Leutenegger. ElasticFusion: Real-time dense SLAM and light source estimation.The International Journal of Robotics Research, 35(14):1697–1716, sep 2016. doi: 10.1177/0278364916669237 1
-
[45]
S. Winkler and P. Mohandas. The evolution of video quality measure- ment: From psnr to hybrid metrics.IEEE Transactions on Broadcast- ing, 54:660 – 668, oct 2008. doi: 10.1109/TBC.2008.2000733 6
-
[46]
M. Woo, J. Neider, T. Davis, and D. Shreiner.OpenGL programming guide: the official guide to learning OpenGL, version 1.2. Addison- Wesley Longman Publishing Co., Inc., 1999. 4
1999
-
[47]
X. Yang, L. Zhou, H. Jiang, Z. Tang, Y . Wang, H. Bao, and G. Zhang. Mobile3DRecon: Real-time Monocular 3D Reconstruction on a Mo- bile Phone.IEEE Transactions on Visualization and Computer Graph- ics, 26(12):3446–3456, dec 2020. doi: 10.1109/TVCG.2020.3023634 1
-
[48]
X. Zhao, Z. Zhao, and A. G. Schwing. Initialization and Alignment for Adversarial Texture Optimization. InProc. ECCV. Springer, Berlin, Germany, 2022. 2, 4, 6
2022
-
[49]
Zhou and V
Q.-Y . Zhou and V . Koltun. Color map optimization for 3D reconstruc- tion with consumer depth cameras.ACM Trans. Graph., 33(4), jul
-
[50]
doi: 10.1145/2601097.2601134 2, 5, 6, 22, 23
- [52]
-
[53]
Section A: We provide further visualizations of the RoomRe- con processes and results
-
[54]
Section B: We provide pseudocodes that explain the related algorithms in the main paper
-
[55]
Section C: We present extensive tables of experiments show- ing quantitative statistics on the test datasets. 7 FURTHERVISUALIZATIONS OF THE ROOMRECONPROCESSES ANDRESULTS 7.1 Detailed visualizations of the Mesh Processing step (a) Room layout (b)M original (c) Room layout andM original overlaid (d)M filtered (e)M combined (f)M combined in wireframes Figur...
-
[56]
Sample Width and Sample Height: Specify the dimensions of each sample
-
[57]
Sample Offset: Specifies the spacing between consecutive samples
-
[58]
Using samples shown in Fig
Sample Angle: Allows rotation of the sample relative to the MBBalign, the vector derived from the Mesh Processing step (Section 3.4) during the Minimum Bounding Box (MBB) [2] calculation. Using samples shown in Fig. 12a and Fig. 12b, floor and ceiling textures can be created using the SampleMode as shown in Fig. 13 and Fig. 14, respectively. (a) Floor sam...
-
[59]
Layout Parsing: This step involves acquiring layout information, including the normals, centers, and four vertices of the vertical walls, as well as the floor and ceiling heights
-
[60]
Loop Check and Form Floor and Ceiling: Loop Check step verifies whether the vertical walls form a closed loop, essential for subsequent mesh processing steps. Using this information, floor and ceiling meshes are generated using the Constrained Delaunay Triangulation (CDT) method [3] or the Minimum Bounding Box (MBB) [2] as described in Section 3.4 of the ...
-
[61]
Mesh Processing (Section 3.4): This process includes mesh filtering, remeshing, and combining to produce the combined mesh (Mcombined)
-
[62]
Plane2Image (Section 3.7): This step involves rendering the textured meshes using our Plane2Image module
-
[63]
Displaying Results: Finally, the textured meshes (M textured) are added to the scene for visualization and further Post Texturing processes (Section 3.8). Tab. 6 presents a comparative analysis of the computational time required for texturing-related processes on an iOS device, an iPhone 12 Pro with an A14 Bionic chip, before and after the implementation ...
2063
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.