Recognition: unknown
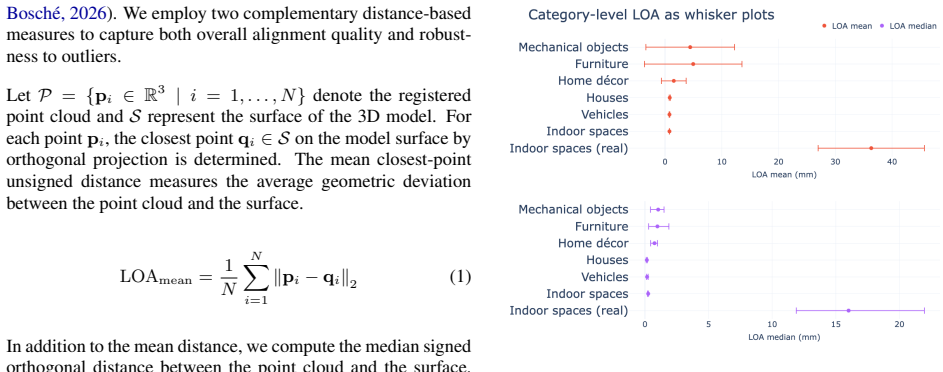
PC2Model: ISPRS benchmark on 3D point cloud to model registration
Pith reviewed 2026-05-10 03:35 UTC · model grok-4.3
The pith
The PC2Model benchmark provides a hybrid dataset of simulated and real point clouds paired with 3D models to train and evaluate registration methods.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper introduces the PC2Model benchmark as a publicly available dataset that pairs simulated point clouds with, in some cases, real-world scans and their corresponding 3D models. Simulated portions deliver precise ground truth and controlled conditions while real portions introduce sensor and environmental artefacts, allowing systematic study of domain transfer and robust training of both classical and data-driven registration methods.
What carries the argument
The PC2Model benchmark dataset, whose hybrid design of simulated point clouds combined with real-world scans and 3D models supplies controlled ground truth alongside authentic artefacts for cross-domain evaluation.
If this is right
- Both classical and data-driven registration methods can be trained and compared under identical controlled and realistic conditions.
- Transferability of learned models from simulation to real scans can be quantified and improved systematically.
- Standardized evaluation becomes possible for downstream tasks that require point cloud to model alignment.
- Public access allows the community to extend the dataset or test new methods against a common baseline.
Where Pith is reading between the lines
- Methods that succeed on this benchmark could be adapted to improve real-time alignment in robotics or augmented reality systems where ground truth is unavailable.
- The same hybrid construction approach might be applied to other 3D vision tasks such as object detection or semantic segmentation to study domain gaps.
- If transfer performance improves markedly, the benchmark could reduce the need for large-scale real-world labeled data collection in future registration research.
Load-bearing premise
The hybrid design of simulated point clouds with real-world scans will enable systematic analysis of model transferability from simulated to real-world scenarios and support robust training across domains.
What would settle it
A direct comparison experiment showing that models trained only on the simulated portion achieve no measurable improvement in registration accuracy or robustness when tested on the real-world portion, compared with models trained directly on real data alone.
Figures







read the original abstract
Point cloud registration involves aligning one point cloud with another or with a three-dimensional (3D) model, enabling the integration of multimodal data into a unified representation. This is essential in applications such as construction monitoring, autonomous driving, robotics, and virtual or augmented reality (VR/AR). With the increasing accessibility of point cloud acquisition technologies, such as Light Detection and Ranging (LiDAR) and structured light scanning, along with recent advances in deep learning, the research focus has increasingly shifted towards downstream tasks, particularly point cloud-to-model (PC2Model) registration. While data-driven methods aim to automate this process, they struggle with sparsity, noise, clutter, and occlusions in real-world scans, which limit their performance. To address these challenges, this paper introduces the PC2Model benchmark, a publicly available dataset designed to support the training and evaluation of both classical and data-driven methods. Developed under the leadership of ICWG II/Ib, the PC2Model benchmark adopts a hybrid design that combines simulated point clouds with, in some cases, real-world scans and their corresponding 3D models. Simulated data provide precise ground truth and controlled conditions, while real-world data introduce sensor and environmental artefacts. This design supports robust training and evaluation across domains and enables the systematic analysis of model transferability from simulated to real-world scenarios. The dataset is publicly accessible at: https://zenodo.org/records/17581812
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces the PC2Model benchmark, a publicly available dataset for point cloud-to-model (PC2Model) registration tasks. It adopts a hybrid design combining simulated point clouds (with precise ground truth and controlled conditions) and, in some cases, real-world scans (introducing sensor and environmental artifacts) along with corresponding 3D models. The benchmark is intended to support training and evaluation of both classical and data-driven methods while enabling systematic analysis of model transferability from simulated to real-world scenarios. The dataset is released via Zenodo.
Significance. If the dataset is accompanied by detailed, reproducible construction protocols, quantitative characterizations, and baseline experiments, it could provide a valuable standardized resource for the 3D computer vision and photogrammetry communities. This would help address persistent challenges in real-world registration such as sparsity, noise, clutter, and occlusions, with direct relevance to applications in construction monitoring, robotics, and autonomous systems.
major comments (2)
- [Abstract] Abstract: The central claim that the hybrid design 'supports robust training and evaluation across domains and enables the systematic analysis of model transferability from simulated to real-world scenarios' is asserted without any reported details on data generation procedures (e.g., explicit noise models, occlusion patterns, density variations, or sensor simulation parameters), statistical comparisons between simulated and real subsets, or baseline registration results that quantify domain gaps or transfer performance. This renders the asserted utility an untested design intent rather than a demonstrated property of the released data.
- [Abstract] Abstract: No quantitative dataset characteristics (e.g., number of point clouds, average point counts, ground-truth alignment error distributions, or validation metrics) or description of how real-world scans were paired with models are provided. For a benchmark paper, these are load-bearing elements needed to assess reproducibility and suitability for the claimed cross-domain training and transferability analysis.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the PC2Model benchmark paper. We agree that the abstract requires strengthening with quantitative details and data generation descriptions to better support the claims. We will revise the manuscript accordingly.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that the hybrid design 'supports robust training and evaluation across domains and enables the systematic analysis of model transferability from simulated to real-world scenarios' is asserted without any reported details on data generation procedures (e.g., explicit noise models, occlusion patterns, density variations, or sensor simulation parameters), statistical comparisons between simulated and real subsets, or baseline registration results that quantify domain gaps or transfer performance. This renders the asserted utility an untested design intent rather than a demonstrated property of the released data.
Authors: We agree that the abstract presents the utility claim without the supporting details listed, which leaves it as an assertion rather than a demonstrated result. The manuscript describes the hybrid design at a high level and provides the Zenodo release, but does not include the specific quantitative elements or baselines in the abstract or main text. We will revise by adding explicit descriptions of data generation procedures (noise models, occlusion patterns, density variations, sensor parameters), statistical comparisons between subsets, and baseline registration results quantifying domain gaps and transfer performance. The abstract will be updated to summarize these additions and reference the new content. revision: yes
-
Referee: [Abstract] Abstract: No quantitative dataset characteristics (e.g., number of point clouds, average point counts, ground-truth alignment error distributions, or validation metrics) or description of how real-world scans were paired with models are provided. For a benchmark paper, these are load-bearing elements needed to assess reproducibility and suitability for the claimed cross-domain training and transferability analysis.
Authors: We agree that these quantitative characteristics and pairing details are essential for a benchmark paper and are not currently provided in the abstract. The manuscript mentions the public Zenodo release but lacks the specific numbers, distributions, metrics, and pairing methodology. We will revise the paper to include these elements: number of point clouds, average point counts, ground-truth alignment error distributions, validation metrics, and a description of how real-world scans were paired with models. These will be added to the abstract and a new or expanded dataset section to support reproducibility and the cross-domain claims. revision: yes
Circularity Check
No circularity: dataset introduction paper with no derivation chain
full rationale
The paper introduces the PC2Model benchmark as a publicly available hybrid dataset combining simulated point clouds and real-world scans for PC2Model registration tasks. No mathematical derivations, equations, fitted parameters, or predictions are present that could reduce to their own inputs by construction. Claims about supporting sim-to-real transferability analysis are forward-looking assertions about dataset utility rather than self-referential results derived from prior steps in the paper. No self-citations, uniqueness theorems, or ansatzes are invoked as load-bearing elements. The work is self-contained as a data release and benchmark description.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Applied Sciences , VOLUME =
Mora, Rocio and Martín-Jiménez, Jose Antonio and Lagüela, Susana and González-Aguilera, Diego , TITLE =. Applied Sciences , VOLUME =. 2021 , NUMBER =
2021
-
[2]
Surface Reconstruction From Point Clouds: A Survey and a Benchmark , year=
Huang, ZhangJin and Wen, Yuxin and Wang, ZiHao and Ren, Jinjuan and Jia, Kui , journal=. Surface Reconstruction From Point Clouds: A Survey and a Benchmark , year=
-
[3]
and Mawas, K
Maboudi, M. and Mawas, K. and Gerke, M. , TITLE =. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences , VOLUME =. 2025 , PAGES =
2025
-
[4]
and Radanović, Marko and Khoshelham, Kourosh , title =
Zhao, Yuan and Zhao, H. and Radanović, Marko and Khoshelham, Kourosh , title =. The Photogrammetric Record , year =. doi:10.1111/phor.12428 , url=
-
[5]
ABC: A Big CAD Model Dataset for Geometric Deep Learning , year=
Koch, Sebastian and Matveev, Albert and Jiang, Zhongshi and Williams, Francis and Artemov, Alexey and Burnaev, Evgeny and Alexa, Marc and Zorin, Denis and Panozzo, Daniele , booktitle=. ABC: A Big CAD Model Dataset for Geometric Deep Learning , year=
-
[6]
Pushing the Frontiers of Unconstrained Face Detection and Recog- nition: IARPA Janus Benchmark A
Wu, Zhirong and Song, Shuran and Khosla, Aditya and Yu, Fisher and Zhang, Linguang and Tang, Xiaoou and Xiao, Jianxiong , booktitle =. 3D ShapeNets: A Deep Representation for Volumetric Shapes , year =. doi:10.1109/CVPR.2015.7298801 , url=
-
[7]
and Jayaraman, Pradeep Kumar and Chu, Hang and Tian, Yunsheng and Li, Yifei and Grandi, Daniele and Sanghi, Aditya and Tran, Linh and Lambourne, Joseph G
Willis, Karl D.D. and Jayaraman, Pradeep Kumar and Chu, Hang and Tian, Yunsheng and Li, Yifei and Grandi, Daniele and Sanghi, Aditya and Tran, Linh and Lambourne, Joseph G. and Solar-Lezama, Armando and Matusik, Wojciech , title =. Proceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR) , month =. 2022 , pages =
2022
-
[8]
Thingi10K: A Dataset of 10,000 3D-Printing Models , author=
-
[9]
The Isprs Benchmark on Indoor Modelling – Preliminary Results , author =. The International Archives of the Photogrammetry, Remote Sensing and Spatial Information Sciences , volume =. 2020 , pages =. doi:10.5194/isprs-archives-XLIII-B5-2020-207-2020 , url=
work page doi:10.5194/isprs-archives-xliii-b5-2020-207-2020 2020
-
[10]
Virtual laser scanning with HELIOS++: A novel take on ray tracing-based simulation of topographic full-waveform 3D laser scanning , journal =
Lukas Winiwarter and Alberto Manuel. Virtual laser scanning with HELIOS++: A novel take on ray tracing-based simulation of topographic full-waveform 3D laser scanning , journal =. 2022 , issn =
2022
-
[11]
, Journal =
Smith, J. , Journal =. Close range photogrammetry for analyzing distressed trees , Volume =
-
[12]
Michalis and I
P. Michalis and I. Dowman , Journal =. A Generic Model for Along-Track Stereo Sensors Using Rigorous Orbit Mechanics , Volume =
-
[13]
Photogrammetric Computer Vision , Year =
F. Photogrammetric Computer Vision , Year =
-
[14]
Smith , Booktitle =
J. Smith , Booktitle =. Remote sensing to predict volcano outbursts , Volume =
-
[15]
and Rottensteiner, F
Maas, A. and Rottensteiner, F. and Heipke, C. , Journal =. Classification under label noise using outdated maps , Year =
-
[16]
K. L. Chan and K. Qin , Journal =. Biomass burning related pollution and their contributions to the air quality in Hong Kong , Year =
-
[17]
and Swatantran, A
Dubayah, R.O. and Swatantran, A. and Huang, W. and Duncanson, L. and Trang, H. and Johnson, K. and Dunne, J.O. and Hurtt, G.C. , Howpublished =
-
[18]
Multiple View Geometry in Computer Vision , publisher=
Hartley, Richard and Zisserman, Andrew , year=. Multiple View Geometry in Computer Vision , publisher=
-
[19]
Evaluating confidence in geometric matching between 3D point clouds and BIM models by integrating coverage, distance, and distribution metrics , journal =. 2026 , issn =. doi:https://doi.org/10.1016/j.autcon.2025.106636 , url =
-
[20]
and McKay, Neil D
Besl, P.J. and McKay, Neil D. , journal=. A method for registration of 3-D shapes , year=
-
[21]
Go-ICP: A Globally Optimal Solution to 3D ICP Point-Set Registration , year=
Yang, Jiaolong and Li, Hongdong and Campbell, Dylan and Jia, Yunde , journal=. Go-ICP: A Globally Optimal Solution to 3D ICP Point-Set Registration , year=
-
[22]
and Strasser, W
Biber, P. and Strasser, W. , booktitle=. The normal distributions transform: a new approach to laser scan matching , year=
-
[23]
2019 IEEE/CVF International Conference on Computer Vision (ICCV) , year =
Wang, Yue and Solomon, Justin , title =. 2019 IEEE/CVF International Conference on Computer Vision (ICCV) , year =. doi:10.1109/ICCV.2019.00362 , publisher =
-
[24]
, title =
Wang, Yue and Solomon, Justin M. , title =. Proceedings of the IEEE/CVF International Conference on Computer Vision (ICCV) , month =
-
[25]
Model Based Training, Detection and Pose Estimation of Texture-Less 3D Objects in Heavily Cluttered Scenes
Hinterstoisser, Stefan and Lepetit, Vincent and Ilic, Slobodan and Holzer, Stefan and Bradski, Gary and Konolige, Kurt and Navab, Nassir. Model Based Training, Detection and Pose Estimation of Texture-Less 3D Objects in Heavily Cluttered Scenes. Computer Vision -- ACCV 2012. 2013
2012
-
[26]
BOP: Benchmark for 6D Object Pose Estimation
Hoda n , Tom \'a s and Michel, Frank and Brachmann, Eric and Kehl, Wadim and Buch, Anders Glent and Kraft, Dirk and Drost, Bertram and Vidal, Joel and Ihrke, Stephan and Zabulis, Xenophon and Sahin, Caner and Manhardt, Fabian and Tombari, Federico and Kim, Tae-Kyun and Matas, Ji r \'i and Rother, Carsten. BOP: Benchmark for 6D Object Pose Estimation. Comp...
2018
-
[27]
Qian. Open3D:. CoRR , volume =. 2018 , url=. 1801.09847 , timestamp =
work page internal anchor Pith review arXiv 2018
-
[28]
A review on geometry and surface inspection in 3D concrete printing , journal =
Karam Mawas and Mehdi Maboudi and Markus Gerke , keywords =. A review on geometry and surface inspection in 3D concrete printing , journal =. 2026 , issn =. doi:https://doi.org/10.1016/j.cemconres.2025.108030 , url =
-
[29]
E. Saiti and T. Theoharis , keywords =. Multimodal registration across 3D point clouds and CT-volumes , journal =. 2022 , issn =. doi:https://doi.org/10.1016/j.cag.2022.06.012 , url =
-
[30]
Fast Global Registration
Zhou, Qian-Yi and Park, Jaesik and Koltun, Vladlen. Fast Global Registration. Computer Vision -- ECCV 2016. 2016
2016
-
[31]
2019 , eprint=
PCRNet: Point Cloud Registration Network using PointNet Encoding , author=. 2019 , eprint=
2019
-
[32]
, Howpublished =
Gago-Silva, A. , Howpublished =
-
[33]
, Howpublished =
Smith, J. , Howpublished =
-
[34]
Range Image-based LiDAR Localization for Autonomous Vehicles , booktitle=
Chen, Xieyuanli and Vizzo, Ignacio and Labe, Thomas and Behley, Jens and Stachniss, Cyrill , year=. Range Image-based LiDAR Localization for Autonomous Vehicles , booktitle=
-
[35]
Poisson Surface Reconstruction for LiDAR Odometry and Mapping , year=
Vizzo, Ignacio and Chen, Xieyuanli and Chebrolu, Nived and Behley, Jens and Stachniss, Cyrill , booktitle=. Poisson Surface Reconstruction for LiDAR Odometry and Mapping , year=
-
[36]
MICP-L: Mesh-based ICP for Robot Localization Using Hardware-Accelerated Ray Casting , booktitle=
Mock, Alexander and Wiemann, Thomas and Pütz, Sebastian and Hertzberg, Joachim , year=. MICP-L: Mesh-based ICP for Robot Localization Using Hardware-Accelerated Ray Casting , booktitle=
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.