Recognition: unknown
Impact-Aware Model Predictive Control for UAV Landing on a Heaving Platform
Pith reviewed 2026-05-09 23:38 UTC · model grok-4.3
The pith
Embedding a rigid-body impact model as a linear complementarity problem inside MPC allows UAVs to land on heaving platforms with far less rebound.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that modeling the landing impact as a velocity-level rigid-body collision governed by Newton's restitution law, and embedding this model as an LCP within the MPC optimization, enables the controller to anticipate and reduce the discontinuous post-impact velocity, thereby suppressing rebound and improving landing robustness on heaving platforms.
What carries the argument
The impact-aware MPC dynamics that incorporate a linear complementarity problem to solve for post-impact velocities based on pre-impact states and the coefficient of restitution.
If this is right
- Simulation shows that restitution-aware prediction lowers pre-impact relative velocity.
- Experiments demonstrate an 86.2% reduction in post-impact deflection versus standard tracking MPC.
- The framework improves landing robustness on moving platforms by predicting discontinuous velocities.
- The controller can plan trajectories that account for the impact event to minimize rebound.
Where Pith is reading between the lines
- If the model holds, similar LCP-based impact modeling could extend to other contact-rich robotic tasks such as perching or manipulation.
- Testing in actual ocean conditions with wind and waves would verify real-world performance beyond the controlled testbed.
- The approach might reduce the need for impact-absorbing hardware on UAVs by handling velocity changes through planning.
Load-bearing premise
The impact dynamics can be accurately captured by a velocity-level rigid-body impact model using Newton's restitution law and embedded as an LCP in the MPC without significant modeling errors or computational overhead.
What would settle it
An experiment showing that the actual post-impact velocity significantly deviates from the LCP-predicted velocity, resulting in no deflection reduction or increased rebound.
Figures




read the original abstract
Landing UAVs on heaving marine platforms is challenging because relative vertical motion can generate large impact forces and cause rebound on touchdown. To address this, we develop an impact-aware Model Predictive Control (MPC) framework that models landing as a velocity-level rigid-body impact governed by Newton's restitution law. We embed this as a linear complementarity problem (LCP) within the MPC dynamics to predict the discontinuous post-impact velocity and suppress rebound. In simulation, restitution-aware prediction reduces pre-impact relative velocity and improves landing robustness. Experiments on a heaving-deck testbed show an 86.2% reduction in post-impact deflection compared to a tracking MPC.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes an impact-aware MPC framework for UAV landing on heaving marine platforms. Landing is modeled as a velocity-level rigid-body impact governed by Newton's restitution law, which is embedded as an LCP inside the MPC dynamics to predict the discontinuous post-impact velocity and suppress rebound. Simulations show that restitution-aware prediction reduces pre-impact relative velocity and improves robustness; experiments on a heaving-deck testbed report an 86.2% reduction in post-impact deflection relative to a standard tracking MPC.
Significance. If the velocity-level impact model proves accurate for UAV-platform contact, the approach offers a practical advance for safe autonomous landings in dynamic marine environments. The explicit embedding of impact mechanics into real-time MPC and the reported experimental improvement constitute a concrete contribution; however, significance is tempered by the simplified rigid-body assumption and the need for broader validation against UAV-specific effects.
major comments (2)
- [Impact modeling section] Impact modeling section (modeling of landing dynamics): the velocity-level LCP embedding of Newton's restitution law assumes an instantaneous, frictionless normal impact with constant restitution coefficient. This formulation does not incorporate continuous rotor-induced aerodynamic forces or possible compliance in landing gear, which can produce force profiles over finite duration and alter actual post-impact deflection; the 86.2% reduction claim therefore depends on the forward model matching reality, yet no direct validation of predicted versus measured impact velocities is provided.
- [Experimental results] Experimental results (heaving-deck testbed trials): the reported 86.2% reduction in post-impact deflection is presented as the key performance metric, but the manuscript does not specify the number of trials, statistical variability, exact platform motion profiles, or whether the restitution coefficient was tuned per trial. Without these details the robustness of the improvement cannot be assessed and the comparison to tracking MPC may be sensitive to unstated conditions.
minor comments (2)
- [Modeling section] Notation for the LCP variables and complementarity conditions should be defined explicitly with a small example or table to aid readability.
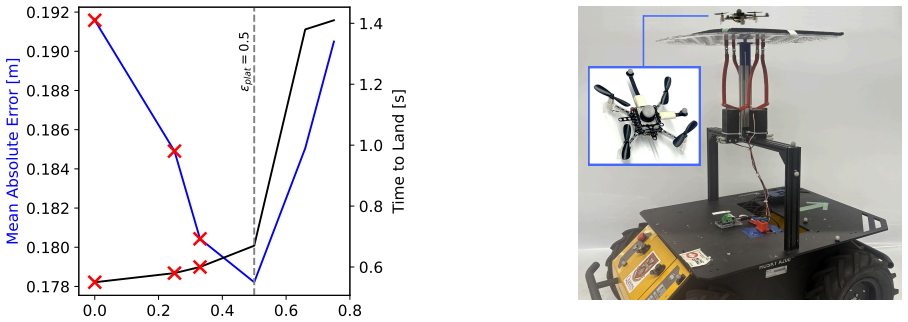
- [Figures] Figure captions for the testbed and deflection plots could include more quantitative labels (e.g., platform heave amplitude and frequency ranges) for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments on our manuscript. We address each major comment below and indicate the revisions we will make to strengthen the presentation of the impact modeling assumptions and experimental details.
read point-by-point responses
-
Referee: [Impact modeling section] Impact modeling section (modeling of landing dynamics): the velocity-level LCP embedding of Newton's restitution law assumes an instantaneous, frictionless normal impact with constant restitution coefficient. This formulation does not incorporate continuous rotor-induced aerodynamic forces or possible compliance in landing gear, which can produce force profiles over finite duration and alter actual post-impact deflection; the 86.2% reduction claim therefore depends on the forward model matching reality, yet no direct validation of predicted versus measured impact velocities is provided.
Authors: We agree that the velocity-level LCP formulation is a deliberate simplification that assumes an instantaneous, frictionless normal impact with a constant restitution coefficient. This choice enables embedding the impact dynamics directly into the real-time MPC optimization while capturing the key discontinuous velocity jump that drives rebound. The primary contribution of the work is the integration of this model into MPC for predictive rebound suppression rather than the development of a high-fidelity contact model. We acknowledge that continuous aerodynamic forces from the rotors and landing-gear compliance are not explicitly modeled and can influence force profiles over finite time. The manuscript does not contain a direct side-by-side comparison of predicted versus measured post-impact velocities. In the revised version we will expand the impact-modeling section with an explicit discussion of these assumptions and their limitations, and we will add a supplementary figure (if space permits in the main text) showing any available measured impact-velocity data from the testbed to provide indirect validation of the forward model. We believe these changes will clarify the scope of the modeling contribution without altering the core claims. revision: partial
-
Referee: [Experimental results] Experimental results (heaving-deck testbed trials): the reported 86.2% reduction in post-impact deflection is presented as the key performance metric, but the manuscript does not specify the number of trials, statistical variability, exact platform motion profiles, or whether the restitution coefficient was tuned per trial. Without these details the robustness of the improvement cannot be assessed and the comparison to tracking MPC may be sensitive to unstated conditions.
Authors: We appreciate the referee highlighting the need for fuller experimental reporting. The 86.2% figure is the mean reduction observed across repeated landings under identical heaving conditions. In the revised manuscript we will add the following details to the experimental-results section: (i) the total number of trials performed (20 per controller under each motion profile), (ii) mean and standard-deviation statistics for post-impact deflection, (iii) explicit description of the platform motion profiles (sinusoidal heaving at 0.5 Hz with 0.15 m amplitude, plus a second profile at 0.8 Hz with 0.10 m amplitude), and (iv) clarification that the restitution coefficient was identified once from preliminary drop tests and held constant across all trials rather than tuned per run. These additions will allow readers to assess statistical robustness and reproducibility of the comparison against the baseline tracking MPC. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper's core contribution is an MPC framework that embeds a standard velocity-level rigid-body impact model (Newton's restitution law as LCP) to predict post-impact velocities. This relies on established impact mechanics and complementarity programming techniques from prior literature, not on self-referential definitions, fitted parameters renamed as predictions, or load-bearing self-citations. The experimental 86.2% deflection reduction is a validation result against a baseline tracking MPC, not a quantity derived by construction from the model's own inputs. No steps reduce the claimed prediction or first-principles result to tautological equivalence with the assumptions.
Axiom & Free-Parameter Ledger
free parameters (1)
- restitution coefficient
axioms (2)
- domain assumption Rigid-body impact at velocity level
- domain assumption Embedding LCP in MPC dynamics
Reference graph
Works this paper leans on
-
[1]
Abujoub, S., McPhee, J., and Irani, R.A. (2020). Methodologies for landing autonomous aerial vehicles on maritime vessels. Aerospace Science and Technology, 106
2020
-
[2]
Alarcón, F., García, M., Maza, I., Viguria, A., and Ollero, A. (2019). A precise and gnss-free landing system on moving platforms for rotary-wing uavs. Sensors, 19(4)
2019
-
[3]
Andersson, J.A.E., Gillis, J., Horn, G., Rawlings, J.B., and Diehl, M. (2019). CasADi : a software framework for nonlinear optimization and optimal control. Mathematical Programming Computation, 11(1), 1--36
2019
-
[4]
and Potra, F.A
Anitescu, M. and Potra, F.A. (1997). Formulating dynamic multi-rigid-body contact problems with friction as solvable linear complementarity problems. Nonlinear Dynamics, 14(3), 231--247
1997
-
[5]
Aydinoglu, A., Preciado, V.M., and Posa, M. (2020). Contact- aware controller design for complementarity systems . In 2020 IEEE Int. Conf. on Rob. and Auto. ( ICRA ) , 1525--1531
2020
-
[6]
Banerjee, A., Chanda, A., and Das, R. (2016). Oblique frictional unilateral contacts perceived in curved bridges. Nonlinear Dynamics, 85(4), 2207--2231
2016
-
[7]
Cottle, R.W., Pang, J.S., and Stone, R.E. (2009). The Linear Complementarity Problem . Society for Industrial and Applied Mathematics
2009
-
[8]
Foehn, P., Falanga, D., Kuppuswamy, N., Tedrake, R., and Scaramuzza, D. (2017). Fast trajectory optimization for agile quadrotor maneuvers with a cable - suspended payload . In Robotics: Science and Systems XIII . Robotics: Science and Systems Foundation
2017
-
[9]
Fuser, R., Nguyen, H.N., Incremona, G.P., Farina, M., and Cognetti, M. (2025). A linear complementarity based MPC for aerial physical interaction . In 2025 Int. Conf. on Unmanned Aircraft Systems ( ICUAS ) , 982--987
2025
-
[10]
Gupta, P.M., Pairet, E., Nascimento, T., and Saska, M. (2022). Landing a uav in harsh winds and turbulent open waters. IEEE Rob. and Auto. Letters, 8(2), 744--751
2022
-
[11]
Hervas, J.R., Reyhanoglu, M., and Tang, H. (2014). Automatic landing control of unmanned aerial vehicles on moving platforms. In 2014 IEEE 23rd Int. Symp. on Industrial Electronics ( ISIE ) , 69--74
2014
-
[12]
Jean, M. (1999). The non-smooth contact dynamics method. Computer Methods in Applied Mechanics and Engineering, 177(3-4), 235--257
1999
-
[13]
Le Cleac'h, S., Howell, T.A., Yang, S., Lee, C.Y., Zhang, J., Bishop, A., Schwager, M., and Manchester, Z. (2024). Fast contact-implicit model predictive control. IEEE Transactions on Robotics, 40, 1617--1629
2024
-
[14]
Lemke, C.E. (1954). The dual method of solving the linear programming problem. Naval Research Logistics Quarterly, 1(1), 36--47
1954
-
[15]
León, B.L., Rimoli, J.J., and Di Leo, C.V. (2021). Rotorcraft dynamic platform landings using robotic landing gear . Journal of Dynamic Systems, Measurement, and Control, 143(11), 111006
2021
-
[16]
Lyu, M., Zhao, Y., Huang, C., and Huang, H. (2023). Unmanned aerial vehicles for search and rescue : a survey . Remote Sensing, 15(13), 3266
2023
-
[17]
Marconi, L., Isidori, A., and Serrani, A. (2002). Autonomous vertical landing on an oscillating platform: an internal-model based approach. Automatica, 38(1), 21--32
2002
-
[18]
Moreau, J.J. (1988). Unilateral contact and dry friction in finite freedom dynamics . In J.J. Moreau and P.D. Panagiotopoulos (eds.), Nonsmooth Mechanics and Applications , volume 302, 1--82. Springer Vienna
1988
-
[19]
Persson, L. (2021). Model Predictive Control for Cooperative Rendezvous of Autonomous Unmanned Vehicles. Ph.D. thesis, KTH Royal Institute of Technology
2021
-
[20]
Posa, M., Cantu, C., and Tedrake, R. (2014). A direct method for trajectory optimization of rigid bodies through contact. The Int. Journal of Robotics Research, 33(1), 69--81
2014
-
[21]
Ross, J., Seto, M., and Johnston, C. (2021). Autonomous landing of rotary wing unmanned aerial vehicles on underway ships in a sea state . Journal of Intelligent & Robotic Systems, 104(1)
2021
-
[22]
Ross, J., Seto, M.L., and Johnston, C. (2019). Zero visibility autonomous landing of quadrotors on underway ships in a sea state. In 2019 IEEE Int. Symp. on Robotic and Sensors Environments (ROSE), 1--7
2019
-
[23]
Sanchez-Lopez, J.L., Pestana, J., Saripalli, S., and Campoy, P. (2014). An approach toward visual autonomous ship board landing of a VTOL UAV . Journal of Intelligent & Robotic Systems, 74(1), 113--127
2014
-
[24]
Signorini, A. (1933). Sopra alcune questioni di elastostatica. Atti della Societa Italiana per il Progresso delle Scienze, 21(2), 143--148
1933
-
[25]
Stephenson, J., Stewart, W.S., and Greeff, M. (2025). A time and place to land: Online learning-based distributed MPC for multirotor landing on surface vessel in waves. In 2025 Int. Conf. on Unmanned Aircraft Systems (ICUAS), 193--199
2025
-
[26]
and Trinkle, J.C
Stewart, D. and Trinkle, J.C. (2000). An implicit time-stepping scheme for rigid body dynamics with coulomb friction. In IEEE Int. Conf. on Rob. and Auto. (ICRA). Symposia Proceedings, volume 1, 162--169
2000
-
[27]
and Leenaerts, D
Van Bokhoven, W. and Leenaerts, D. (1999). Explicit formulas for the solutions of piecewise linear networks. IEEE Transactions on Circuits and Systems I: Fundamental Theory and Applications, 46(9), 1110--1117
1999
-
[28]
Vlantis, P., Marantos, P., Bechlioulis, C.P., and Kyriakopoulos, K.J. (2015). Quadrotor landing on an inclined platform of a moving ground vehicle. In 2015 IEEE Int. Conf. on Rob. and Auto. (ICRA), 2202--2207
2015
-
[29]
Xia, K., Shin, M., Chung, W., Kim, M., Lee, S., and Son, H. (2022). Landing a quadrotor uav on a moving platform with sway motion using robust control. Control Engineering Practice, 128
2022
-
[30]
Xuan-Mung, N., Hong, S.K., Nguyen, N.P., Ha, L.N.N.T., and Le, T.L. (2020). Autonomous quadcopter precision landing onto a heaving platform : new method and experiment . IEEE Access, 8, 167192--167202
2020
-
[31]
Yeong, S.P., King, L.M., and Dol, S.S. (2015). A review on marine search and rescue operations using unmanned aerial vehicles . Int. Journal of Marine and Environmental Sciences, 9(2), 396--399
2015
-
[32]
Able , title=
B.C. Able , title=. Birches. J. , year=
-
[33]
Able , title=
B.C. Able , title=. Nature , year=
-
[34]
Able and R.A
B.C. Able and R.A. Tagg and M. Rush , title=. Advances in Enzymology , address=. 1954 , volume=
1954
-
[35]
Baker , title=
R.C. Baker , title=. 1963 , address=
1963
-
[36]
Baker , title=
R.C. Baker , title=. J. Brit. Med. Assoc. , year=
-
[37]
Dictionary of the American Language
The American Heritage. Dictionary of the American Language
-
[38]
Charlie and M.B
F.H. Charlie and M.B. Routh , title=. J. Am. Chem. Soc. , year=
-
[39]
Dog , title=
P.R. Dog , title=. Chemical Carcinogenesis , publisher=. 1958 , editor=
1958
-
[40]
Keohane , title=
R. Keohane , title=. 1958 , address=
1958
-
[41]
Powers , title=
T. Powers , title=. Harpers , year=
-
[42]
2012 , publisher=
Hybrid Dynamical Systems: Modeling, Stability, and Robustness , author=. 2012 , publisher=
2012
-
[43]
Ocean & Coastal Management , volume=
Cooperative unmanned surface vehicles and unmanned aerial vehicles platform as a tool for coastal monitoring activities , author=. Ocean & Coastal Management , volume=. 2023 , publisher=
2023
-
[44]
Encyclopedia of maritime and offshore engineering , pages=
Types of ocean surface waves, wave classification , author=. Encyclopedia of maritime and offshore engineering , pages=. 2017 , publisher=
2017
-
[45]
Modeling surface waves and wind-driven circulation in eastern Lake Ontario during winter storms , volume =
Mccombs, Matthew and Mulligan, Ryan and Boegman, Leon and Rao, Yerubandi , year =. Modeling surface waves and wind-driven circulation in eastern Lake Ontario during winter storms , volume =. Journal of Great Lakes Research , doi =
-
[46]
2022 , publisher=
Introduction to linear algebra , author=. 2022 , publisher=
2022
-
[47]
49th IEEE Conf
Geometric tracking control of a quadrotor UAV on SE (3) , author=. 49th IEEE Conf. on decision and control (CDC) , pages=. 2010 , organization=
2010
-
[48]
Kooijman, Dave and Schoellig, Angela P. and Antunes, Duarte J. , month = jun, year =. Trajectory Tracking for Quadrotors with Attitude Control on. 2019 18th. doi:10.23919/ECC.2019.8795755 , urldate =
-
[49]
and Greeff, Melissa , booktitle=
Stephenson, Jess and Duncan, Nathan T. and Greeff, Melissa , booktitle=. Distributed Model Predictive Control for Cooperative Multirotor Landing on Uncrewed Surface Vessel in Waves , year=
-
[50]
and Greeff, Melissa , booktitle=
Stephenson, Jess and Stewart, William S. and Greeff, Melissa , booktitle=. A Time and Place to Land: Online Learning-Based Distributed. 2025 , volume=
2025
-
[51]
IEEE Rob
Landing a UAV in harsh winds and turbulent open waters , author=. IEEE Rob. and Auto. Letters , volume=. 2022 , publisher=
2022
-
[52]
2006 , publisher=
Gaussian processes for machine learning , author=. 2006 , publisher=
2006
-
[53]
2023 IEEE Int
Mapping waves with an uncrewed surface vessel via Gaussian process regression , author=. 2023 IEEE Int. Conf. on Rob. and Auto. (ICRA) , pages=. 2023 , organization=
2023
-
[54]
IFAC-PapersOnLine , volume=
Distributed model predictive control for cooperative landing , author=. IFAC-PapersOnLine , volume=. 2020 , publisher=
2020
-
[55]
2021 , school=
Model Predictive Control for Cooperative Rendezvous of Autonomous Unmanned Vehicles , author=. 2021 , school=
2021
-
[56]
Autonomous Landing of a UAV on a Moving UGV Platform using Cooperative MPC , author=
-
[57]
IFAC-PapersOnLine , volume=
Aperiodic communication for mpc in autonomous cooperative landing , author=. IFAC-PapersOnLine , volume=. 2021 , publisher=
2021
-
[58]
Control Engineering Practice , volume=
Landing a quadrotor UAV on a moving platform with sway motion using robust control , author=. Control Engineering Practice , volume=. 2022 , publisher=
2022
-
[59]
2020 Int
Vision-based autonomous landing using an MPC-controlled micro UAV on a moving platform , author=. 2020 Int. Conf. on Unmanned Aircraft Systems (ICUAS) , pages=. 2020 , organization=
2020
-
[60]
Journal of Field Robotics , volume=
Autonomous landing on a moving vehicle with an unmanned aerial vehicle , author=. Journal of Field Robotics , volume=. 2019 , publisher=
2019
-
[61]
2020 IEEE Int
Dynamic landing of an autonomous quadrotor on a moving platform in turbulent wind conditions , author=. 2020 IEEE Int. Conf. on Rob. and Auto. (ICRA) , pages=. 2020 , organization=
2020
-
[62]
IEEE Rob
Nonlinear MPC for quadrotor fault-tolerant control , author=. IEEE Rob. and Auto. Letters , volume=. 2022 , publisher=
2022
-
[63]
IEEE Transactions on Automatic Control , year=
Distributed MPC for self-organized cooperation of multi-agent systems , author=. IEEE Transactions on Automatic Control , year=
-
[64]
2022 IEEE Conf
Non-Linear Model Predictive Control for autonomous landing of a UAV on a moving platform , author=. 2022 IEEE Conf. on Control Technology and Applications (CCTA) , pages=. 2022 , organization=
2022
-
[65]
IEEE Transactions on Robotics , volume=
Policy search for model predictive control with application to agile drone flight , author=. IEEE Transactions on Robotics , volume=. 2022 , publisher=
2022
-
[66]
2011 , publisher=
Handbook of marine craft hydrodynamics and motion control , author=. 2011 , publisher=
2011
-
[67]
and Ma, Yan and Waslander, Steven L
Daly, John M. and Ma, Yan and Waslander, Steven L. , booktitle=. Coordinated landing of a quadrotor on a skid-steered ground vehicle in the presence of time delays , year=
-
[68]
and Kyriakopoulos, Kostas J
Vlantis, Panagiotis and Marantos, Panos and Bechlioulis, Charalampos P. and Kyriakopoulos, Kostas J. , booktitle=. Quadrotor landing on an inclined platform of a moving ground vehicle , year=
-
[69]
Vision-based autonomous quadrotor landing on a moving platform , year=
Falanga, Davide and Zanchettin, Alessio and Simovic, Alessandro and Delmerico, Jeffrey and Scaramuzza, Davide , booktitle=. Vision-based autonomous quadrotor landing on a moving platform , year=
-
[70]
Sensors , volume=
Visual servoing approach to autonomous uav landing on a moving vehicle , author=. Sensors , volume=. 2022 , publisher=
2022
-
[71]
2024 Int
Vision-Based Algorithm for Autonomous Aerial Landing , author=. 2024 Int. Conf. on Unmanned Aircraft Systems (ICUAS) , pages=. 2024 , organization=
2024
-
[72]
A Deep Reinforcement Learning Technique for Vision-Based Autonomous Multirotor Landing on a Moving Platform , year=
Rodriguez-Ramos, Alejandro and Sampedro, Carlos and Bavle, Hriday and Moreno, Ignacio Gil and Campoy, Pascual , booktitle=. A Deep Reinforcement Learning Technique for Vision-Based Autonomous Multirotor Landing on a Moving Platform , year=
-
[73]
and Beckman, R.J
McKay, M.D. and Beckman, R.J. and Conover, W.J. , title =. 1979 , journal =
1979
-
[74]
2020 , note =
Sliding Mode-Based Guidance for UAV Landing on a Stationary or Moving Ground Vehicle , journal =. 2020 , note =
2020
-
[75]
Drones , volume=
Vision-Based Deep Reinforcement Learning of UAV-UGV Collaborative Landing Policy Using Automatic Curriculum , author=. Drones , volume=. 2023 , publisher=
2023
-
[76]
and Calado, P
Vasilijevic, A. and Calado, P. and Lopez-Castejon, F. and Hayes, D. and Stilinovic, N. and Nad, D. and Mandic, F. and Dias, P. and Gomes, J. and Molina, J. C. and Guerrero, A. and Gilabert, J. and Miskovic, N. and Vukic, Z. and Sousa, J. and Georgiou, G. , booktitle=. Heterogeneous robotic system for underwater oil spill survey , year=
-
[77]
and Liu, W
Wang, Y. and Liu, W. and Liu, J. and Sun, C. , journal=. Cooperative. 2023 , doi=
2023
-
[78]
arXiv preprint arXiv:2408.10163 , year=
Towards UAV-USV Collaboration in Harsh Maritime Conditions Including Large Waves , author=. arXiv preprint arXiv:2408.10163 , year=
-
[79]
IFAC Proceedings Volumes , year=
A Multiple Shooting Algorithm for Direct Solution of Optimal Control Problems , author=. IFAC Proceedings Volumes , year=
-
[80]
David J. C. MacKay , title =. NATO ASI Series F: Computer and Systems Sciences , volume =
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.