Analytical PI Tuning for Second-Order Plants with Monotonic Response and Minimum Settling Time
Pith reviewed 2026-05-21 09:36 UTC · model grok-4.3
The pith
Two analytical PI tuning formulas achieve monotonic step responses with minimum settling time for second-order plants with real poles.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
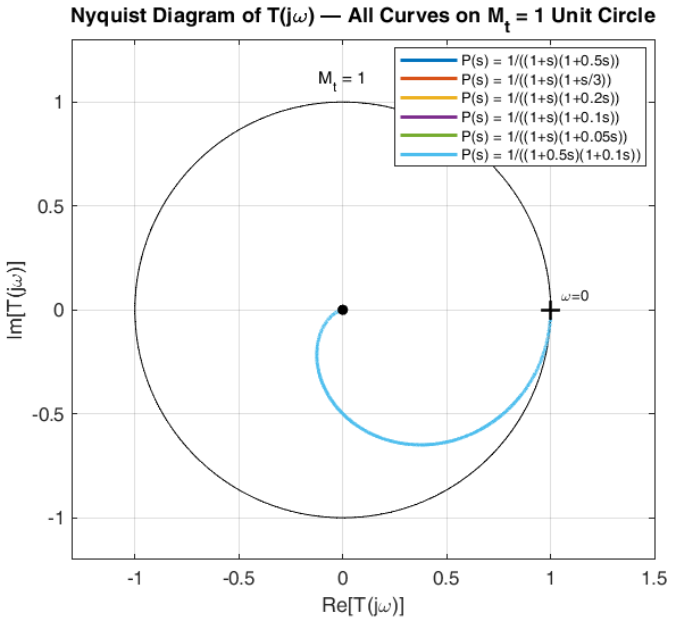
This paper shows that for second-order plants with distinct real poles, there are two closed-form PI tuning solutions that guarantee a monotonic closed-loop step response and minimum settling time. The first uses pole-zero cancellation to obtain a critically damped second-order system. The second collocates the three closed-loop poles at one location without cancellation when the pole ratio is less than two, yielding a triple-pole transfer function with one zero that settles faster than the cancellation approach. These solutions form a continuous tuning rule across all pole ratios. It further establishes that the closed-loop systems a^n/(s+a)^n have maximum sensitivity, phase margin, and a n
What carries the argument
The two pole-placement strategies for the closed-loop characteristic equation (cancellation to a critically damped pair versus triple-pole collocation) together with the scale-invariant robustness properties of the monic all-pole family a^n/(s+a)^n.
If this is right
- The resulting controller gains are given directly by algebraic expressions in the two plant pole locations.
- When the plant poles differ by a factor less than two the non-cancellation method produces a strictly shorter settling time while keeping the response monotonic.
- The robustness margins for the chosen closed-loop dynamics remain identical for any pole location and can be precomputed from order alone.
- The piecewise definition supplies a complete analytical tuning procedure that covers the full range of second-order plants with real poles.
Where Pith is reading between the lines
- The formulas could serve as initial analytical seeds for tuning plants that include small unmodeled dynamics or transport delays.
- The constant robustness margins suggest that similar repeated-pole patterns may produce predictable margins in other controller structures.
- Testing the tunings on plants whose poles are slightly complex would reveal how sensitive the monotonicity guarantee is to modeling error.
Load-bearing premise
The plant must be exactly second-order with two distinct real poles and the design goal must be strictly monotonic step response with minimum settling time under PI control.
What would settle it
A different PI tuning on any second-order real-pole plant that yields a strictly monotonic response with shorter settling time than either proposed method, or a measured gain margin that differs from the formula 1 + sec^n(π/n) for the corresponding closed-loop order n.
Figures

read the original abstract
This study presents two analytical closed-form PI controller tuning solutions for second-order plants with real poles, each achieving monotonic step response and minimum settling time. The first solution employs pole-zero cancellation, placing the controller zero at the slower plant pole and reducing the closed-loop dynamics to a critically damped second-order system. The second solution, applicable when the plant pole ratio is less than two, places all three closed-loop poles at a common location without cancelling any plant pole, yielding a closed-loop transfer function with a triple real pole and a zero. Despite retaining a closed-loop zero, this solution achieves strictly faster settling time than the pole-zero cancellation method in its region of applicability. The two solutions coincide at the boundary pole ratio of two and together form a continuous piecewise-analytical tuning covering the full range of plant pole ratios. This study further establishes that closed-loop transfer functions of the form a^n/(s + a)^n possess a maximum sensitivity Ms together with phase margin and gain margin that are independent of the pole location a and depend solely on the order n, yielding universal robustness constants for each n. A closed-form expression GM(n) = 1 + sec^n(pi/n) is established for the gain margin of the family. Numerical verification confirms the analytical results across multiple plant configurations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents two analytical closed-form PI tuning rules for second-order plants with distinct real poles that guarantee monotonic closed-loop step responses and minimum settling time within the PI class. The first cancels the slower pole to obtain a critically damped second-order closed loop; the second places a triple real pole (with LHP zero) when the pole ratio is below two. The rules coincide at ratio two and cover the full range. It further shows that the family T(s) = a^n/(s+a)^n has maximum sensitivity, phase margin, and gain margin independent of a, with the explicit formula GM(n) = 1 + sec^n(π/n) derived from the phase-crossover condition ω/a = tan(π/n). Numerical verification is stated to confirm both the tuning formulas and the robustness expressions.
Significance. If the derivations hold, the work supplies practical, non-iterative tuning formulas that enforce monotonicity and settling-time optimality for a common plant class, together with parameter-independent robustness benchmarks for the all-real-pole closed-loop family. These results are directly usable in industrial control design and provide a clean benchmark for comparing robustness of other controllers.
minor comments (3)
- [Abstract and §1] The abstract and introduction should state the plant model explicitly (e.g., G(s) = 1/((s+p1)(s+p2)), p1 < p2) and the precise definition of settling time used for the optimality claim.
- [Numerical verification] The numerical verification section should report the exact range of pole ratios tested, the quantitative error metric between analytical and simulated settling times, and any cases where monotonicity was marginally violated.
- [§3.2] Clarify whether the triple-pole placement remains strictly monotonic for all pole ratios below two or only for ratios sufficiently less than two; a short proof sketch or counter-example check would help.
Simulated Author's Rebuttal
We thank the referee for the positive summary of our manuscript, the assessment of its significance, and the recommendation for minor revision. The referee's description accurately reflects the analytical tuning rules, the piecewise coverage of pole ratios, and the universal robustness results for the all-real-pole closed-loop family. No specific major comments were raised in the report.
Circularity Check
No significant circularity; derivations are standard analytical pole placement and frequency-domain algebra
full rationale
The paper derives the two PI tuning rules via explicit pole-placement constructions: one cancels the slower plant pole to force a critically damped closed-loop pair, the other places a triple real pole (plus LHP zero) when the pole ratio <2. These are algebraic solutions to the desired closed-loop characteristic equation and monotonicity constraint, not reductions to fitted inputs or self-definitions. The GM(n) = 1 + sec^n(π/n) expression follows directly from solving for the phase-crossover frequency of L(s) = a^n / [(s+a)^n - a^n], yielding ω_pc/a = tan(π/n) and the magnitude relation by trigonometry; this is an independent frequency-domain calculation for the given family, not imported via self-citation or ansatz. No load-bearing self-citations, uniqueness theorems, or renamings of known results are present. The entire chain is self-contained against external benchmarks of pole placement and Bode analysis.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
The optimal PI parameters are K=T1/(4KpT2), Ti=T1 ... closed-loop transfer function reduces to T(s)=1/(1+2T2 s)^2
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
closed-loop transfer functions of the form a^n/(s+a)^n ... GM(n)=1+sec^n(π/n)
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Introduction The proportional-integral (PI) controller remains the most widely used feedback controller in industrial process control due to its simplicity and effectiveness. Tuning PI controllers to achieve satisfactory transient response has been an active research a rea for decades. The first systematic tuning method was proposed by Ziegler and Nichols...
-
[2]
Problem Statement Consider a stable second-order plant with transfer function 𝑃(𝑠) = 𝐾𝑝 (1 + 𝑠𝑇1)(1 + 𝑠𝑇2) (1) where Kp > 0 is the plant gain, and T1 ≥ T2 > 0 are the plant time constants, with slow pole at s = −1/T1 and fast pole at s = −1/T2. The plant is controlled by a PI controller 𝐶(𝑠) = 𝐾 (1 + 1 𝑠𝑇𝑖 ) (2) in a unity feedback configuration, where K ...
-
[3]
Analytical Solution The closed-loop characteristic polynomial (4) has three roots. In the most general case, these roots are either three real poles or one real pole and a complex conjugate pair. Both configurations are consistent with the Routh-Hurwitz stability conditions for positive K and Ti. From Vieta's formulas applied to (4), the three closed-loop...
-
[4]
Matching (4) to this form requires three degrees of freedom, but the PI controller provides only two
(9) where 𝛼, 𝜁, and 𝜔0 are design parameters. Matching (4) to this form requires three degrees of freedom, but the PI controller provides only two. To reconcile this mismatch, the system order must be reduced. The PI controller introduces a zero at 𝑠 = −1/𝑇𝑖. Choosing 𝑇𝑖 = 𝑇1places this zero at the slow plant pole, yielding exact pole–zero cancellation. S...
-
[5]
Universal Robustness Properties After cancellation of the slow pole, the loop transfer function becomes 𝐿(𝑠)= 𝐶(𝑠)𝑃(𝑠)= KKp 𝑠𝑇1(1 + 𝑠𝑇2) (15) Substituting the optimal PI parameters from (12), 𝐾 = 𝑇1 4𝐾𝑝𝑇2 , 𝑇𝑖 = 𝑇1, yields 𝐿(𝑠)= 1 4𝑇2𝑠(1 + 𝑠𝑇2) (16) 4.1 Complementary Sensitivity The complementary sensitivity is 𝑇𝑐(𝑠)= 𝐿(𝑠) 1 + 𝐿(𝑠)= 1 4𝑇2 2𝑠2 + 4𝑇2𝑠 + 1 =...
-
[6]
Substituting back, ∣ 𝑆(𝑗𝜔)∣2= 16 ⋅ 1 2 ⋅ 3 2 (1 + 4 1 2) 2 = 12 9 (23) Hence, 𝑀𝑠 = √12 9 = 2 √3 ≈ 1.155 (24) 4.3 Phase Margin The phase margin is determined at the gain crossover frequency, where ∣ 𝐿(𝑗𝜔)∣= 1. From (15), 𝐿(𝑗𝜔)= 1 4𝑇2 𝑗𝜔(1 + 𝑗𝜔𝑇2) (25) The magnitude is ∣ 𝐿(𝑗𝜔)∣= 1 4𝑇2 𝜔√1 + (𝜔𝑇2)2 (26) Setting ∣ 𝐿(𝑗𝜔)∣= 1gives the gain crossover condition 4...
-
[7]
Numerical Verification The proposed tuning formulas (12) are verified on six second-order plants with different time constant ratios T1/T2. For each plant the controller parameters are computed directly from the closed-form expressions without any numerical optimization. The closed-loop step response is simulated and the performance metrics are recorded. ...
-
[8]
Conclusion A closed -form analytical PI tuning method is presented that guarantees monotonic step response with minimum settling time for second -order plants . The optimal controller parameters K=T1/(4KpT2) and Ti=T1 are determined solely by the plant time constants T 1, T2 and plant gain Kp. A further result is established: the proposed tuning yields un...
-
[9]
Optimum settings for automatic controllers
Ziegler JG, Nichols NB. Optimum settings for automatic controllers. Trans ASME. 1942;64:759-768
work page 1942
-
[10]
Refinements of the Ziegler-Nichols tuning formula
Hang CC, Astrom KJ, Ho WK. Refinements of the Ziegler-Nichols tuning formula. IEE Proc D Control Theory Appl. 1991;138(2):111-118
work page 1991
-
[11]
Tuning PI controllers for integrator/dead time processes
Tyreus BD, Luyben WL. Tuning PI controllers for integrator/dead time processes. Ind Eng Chem. 1992;31:2625-2628
work page 1992
-
[12]
Ogata K. Modern Control Engineering. 5th ed. Prentice Hall; 2010
work page 2010
- [13]
-
[14]
Overshoot and settling time assignment with PID for first -order and second-order systems
Nguyen NH, Nguyen PD. Overshoot and settling time assignment with PID for first -order and second-order systems. IET Control Theory Appl. 2018;12(17):2407-2416
work page 2018
-
[15]
Generalized optimal and explicit PI/PID tuning formulas for underdamped second-order systems
Albatran S, Smadi IA, Bataineh HA. Generalized optimal and explicit PI/PID tuning formulas for underdamped second-order systems. Int J Control Autom Syst. 2020;18(4):1023-1032
work page 2020
-
[16]
Design of active inductor and stability test for passive RLC low-pass filter
Tran MT, Kuwana A, Kobayashi H. Design of active inductor and stability test for passive RLC low-pass filter. Comput Sci Inf Technol. 2020:203-224
work page 2020
-
[17]
Transient response counts when choosing phase margin
Basso C. Transient response counts when choosing phase margin. Electronic Design. November 2008
work page 2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.