Recognition: unknown
Optimal sensor placement for the reconstruction of ocean states using differentiable Gumbel-Softmax sampling operator
Pith reviewed 2026-05-08 09:03 UTC · model grok-4.3
The pith
A differentiable Gumbel-Softmax operator lets sparse ocean sensors halve reconstruction error by jointly optimizing placement and mapping.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
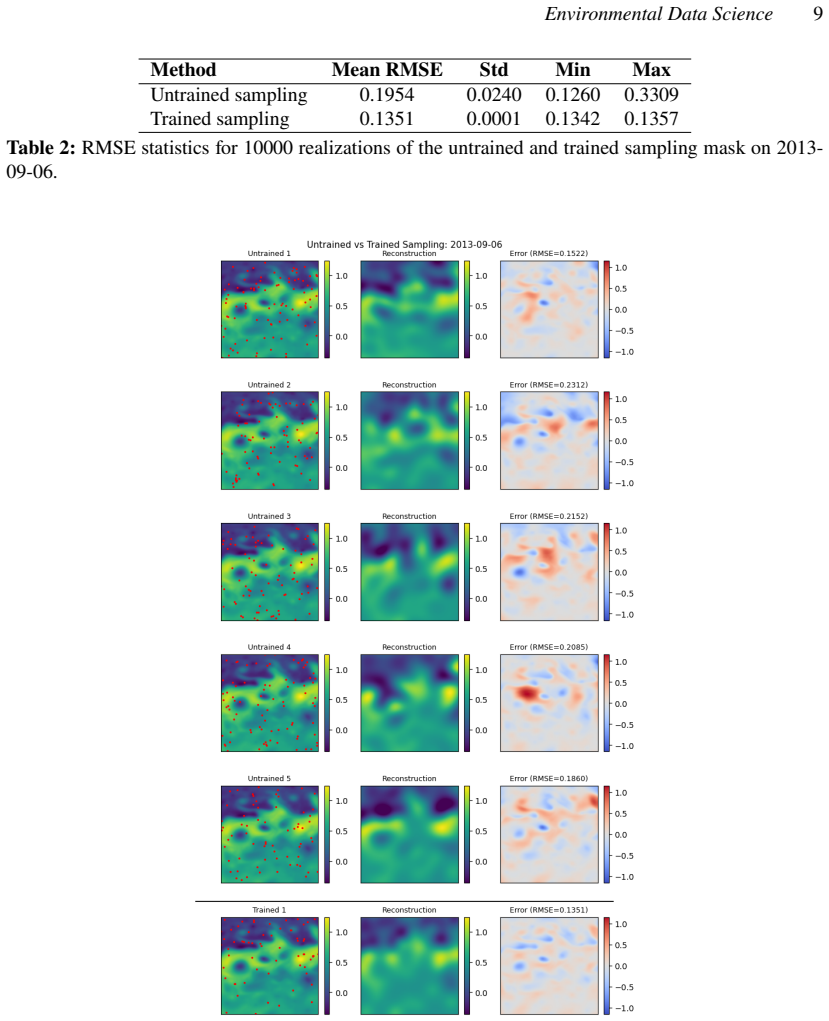
The central claim is that a differentiable adaptive sensor placement framework based on a Gumbel-Softmax sampling operator can jointly optimize a probabilistic sampling mask and the reconstruction mapping (such as optimal-interpolation correlation lengths) from an ensemble of forecasts. In observing-system simulation experiments for sea surface height over a 14° by 14° Gulf Stream domain, this yields RMSE of 0.0908 m and 93.1 percent explained variance at a 0.1 percent sensor budget, compared with 0.1750 m and 74.4 percent for uniform random sampling. The resulting masks remain effective when the training ensemble includes noise and spatial displacements up to 1° and produce interpretable, f
What carries the argument
The differentiable Gumbel-Softmax sampling operator, which relaxes discrete sensor selection into a continuous, differentiable distribution so that placement probabilities and reconstruction parameters can be optimized together by gradient descent on an ensemble of ocean forecasts.
If this is right
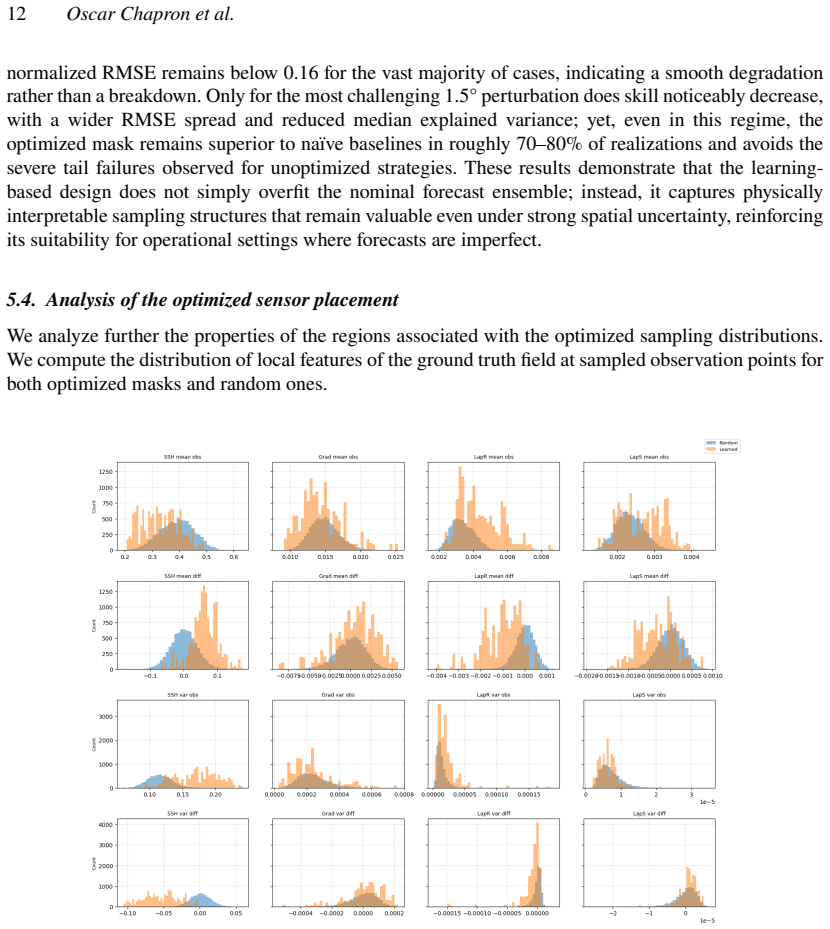
- Optimized placements preferentially sample energetic regions such as eddies and fronts rather than spreading observations uniformly.
- Skill improvements persist when the forecast ensemble used for optimization contains realistic noise and displacements up to one degree.
- The framework supplies a scalable, budget-aware procedure for designing observation networks in other geophysical domains.
- The resulting sampling patterns are directly interpretable and can inform adaptive sensing strategies.
Where Pith is reading between the lines
- The same joint-optimization idea could be tested on multi-variable reconstruction tasks that include temperature or velocity alongside height.
- Running the method on real sparse observations instead of perfect model simulations would reveal how well it handles model-reality mismatch.
- If consistent placement patterns appear across different ocean models and regions, they may identify universal high-impact sampling locations.
- The learned correlation lengths could be fed back into operational interpolation schemes to improve them even without changing the sensor network.
Load-bearing premise
The approach assumes an ensemble of forecasts or simulations exists that is representative enough of real ocean variability for the jointly optimized mask and reconstructor to generalize beyond the training data.
What would settle it
Apply the learned sensor mask to an independent high-resolution ocean simulation withheld from training and check whether reconstruction RMSE stays below 0.1 m at the same 0.1 percent budget; a substantially higher error would falsify the claimed improvement.
Figures




read the original abstract
Accurately reconstructing and forecasting ocean fields from sparse observations is critical for both operational and scientific purposes. Optimizing sensor placement to maximize reconstruction skill remains challenging due to evolving ocean dynamics and practical deployment constraints. Traditional approaches, such as Empirical Orthogonal Functions, greedy search, or Gaussian processes, either assume static observation networks or scale poorly in high-resolution and non-stationary regimes. We introduce a differentiable adaptive sensor placement framework based on a Gumbel-Softmax sampling operator. Given an ensemble of forecasts or simulations, the method jointly optimizes a probabilistic sampling mask and the reconstruction mapping (e.g., Optimal Interpolation correlation lengths) under strict observation budgets. Numerical experiments are conducted for Sea Surface Height reconstruction in a Gulf Stream region through Observing-System Simulation Experiments using a state-of-the-art high-resolution ocean simulation. With a sensor budget of only 0.1% (fewer than 100 point-wise observations on a 14{\deg}x14{\deg} domain) the optimized sampling reduces the reconstruction RMSE by more than half (0.0908 m versus 0.1750 m) and increases explained variance by about 20% (93.1% versus 74.4%) compared with a uniform random strategy. The method remains robust when trained on noisy ensembles with significant spatial displacement (up to 1{\deg}), demonstrating practical applicability under forecast uncertainty. Overall, the framework provides a scalable, budget-aware approach to designing observation networks. Beyond improved skill, it yields interpretable sampling patterns that consistently target energetic regions such as eddies and fronts, offering a transferable tool for adaptive sensing in geophysical systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces a differentiable adaptive sensor placement framework using a Gumbel-Softmax sampling operator. Given an ensemble of forecasts, it jointly optimizes a probabilistic sampling mask and the reconstruction mapping (e.g., Optimal Interpolation correlation lengths) under strict observation budgets. OSSE experiments on Sea Surface Height reconstruction in a Gulf Stream region show that with a 0.1% sensor budget the optimized placement halves RMSE (0.0908 m vs 0.1750 m) and raises explained variance by ~20% (93.1% vs 74.4%) relative to uniform random sampling, while remaining robust to noisy ensembles with up to 1° spatial displacement.
Significance. If the performance gains can be unambiguously attributed to the placement operator, the work supplies a scalable, budget-constrained method for designing adaptive observation networks in non-stationary geophysical flows. The production of interpretable patterns that preferentially sample energetic features (eddies, fronts) and the explicit handling of forecast uncertainty constitute practical strengths for operational oceanography.
major comments (1)
- Abstract: the central performance claims compare the Gumbel-Softmax-optimized mask against a uniform-random strategy, yet it is not stated whether the random baseline employs the same jointly optimized reconstruction parameters (e.g., OI correlation lengths) or default/untuned values. Because the framework optimizes both the mask and the reconstructor, any improvement cannot be attributed solely to sensor placement unless the baseline is identically tuned; this distinction is load-bearing for the reported RMSE and explained-variance gains.
Simulated Author's Rebuttal
We thank the referee for the careful review and the constructive major comment. We address it point by point below and will make the requested clarifications in the revised manuscript.
read point-by-point responses
-
Referee: [—] Abstract: the central performance claims compare the Gumbel-Softmax-optimized mask against a uniform-random strategy, yet it is not stated whether the random baseline employs the same jointly optimized reconstruction parameters (e.g., OI correlation lengths) or default/untuned values. Because the framework optimizes both the mask and the reconstructor, any improvement cannot be attributed solely to sensor placement unless the baseline is identically tuned; this distinction is load-bearing for the reported RMSE and explained-variance gains.
Authors: We agree that this distinction is essential and that the abstract should be unambiguous. In the experimental design, the uniform-random baseline employs the same jointly optimized reconstruction parameters (e.g., OI correlation lengths) as the Gumbel-Softmax mask; the reconstructor is tuned independently for each mask type under the fixed 0.1% budget before the final RMSE and explained-variance metrics are computed. This setup isolates the contribution of the placement operator. We will revise the abstract to state explicitly that the comparison uses “a uniform random strategy with identically tuned reconstruction parameters.” We will also add a clarifying sentence in the Methods section describing the baseline tuning procedure. revision: yes
Circularity Check
No circularity; empirical results from independent OSSEs
full rationale
The paper introduces a new differentiable Gumbel-Softmax framework that jointly optimizes a probabilistic sampling mask and reconstruction parameters (e.g., OI correlation lengths) under observation budgets. All reported performance numbers (RMSE 0.0908 m vs 0.1750 m, explained variance 93.1% vs 74.4%) are obtained from numerical OSSEs on an independent high-resolution ocean simulation for a Gulf Stream domain. No derivation step reduces by construction to its own inputs, no load-bearing self-citation chain exists, and the central claims rest on external simulation benchmarks rather than fitted or renamed quantities. The method is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (2)
- observation budget
- Gumbel-Softmax temperature
axioms (1)
- domain assumption Ensemble of forecasts or simulations adequately represents ocean uncertainty for training the placement strategy.
Reference graph
Works this paper leans on
-
[1]
Alexanderian A(2021) Optimal experimental design for infinite-dimensional Bayesian inverse problems governed by PDEs: A review.Inverse Problems37(4), 043001. Andersson TR, Bruinsma WP, Markou S, Requeima J, Coca-Castro A, Vaughan A, Ellis AL, Lazzara MA, Jones D, Hosking S et al(2023) Environmental sensor placement with convolutional Gaussian neural proce...
2021
-
[2]
Categorical Reparameterization with Gumbel-Softmax
Cambridge university press. Deng Z, He C and Liu Y(2021) Deep neural network-based strategy for optimal sensor placement in data assimilation of turbulent flow.Physics of Fluids33(2). Fablet R, Chapron B, Drumetz L, Mémin E, Pannekoucke O and Rousseau F(2021) Learning variational data assimilation models and solvers.Journal of Advances in Modeling Earth S...
work page internal anchor Pith review arXiv 2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.