Recognition: no theorem link
sumoITScontrol: Traffic Controller Collection for SUMO Traffic Simulations
Pith reviewed 2026-05-12 00:59 UTC · model grok-4.3
The pith
A shared library of traffic controller code for SUMO simulations shows that stochastic variability requires replicated experiments and statistical testing for reliable performance claims.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central claim is that a curated collection of controller implementations for SUMO, when evaluated through replicated stochastic simulations, reveals the substantial influence of randomness on performance metrics and therefore necessitates variance-aware reporting together with statistical hypothesis testing.
What carries the argument
The sumoITScontrol framework, which supplies standardized TraCI implementations of common urban and freeway controllers and pairs them with protocols for replicated, variance-aware simulation experiments.
If this is right
- New control algorithms can be tested against identical, publicly available baselines instead of custom ones.
- Performance differences reported in future studies will more likely reflect actual controller quality once replications and statistics are required.
- The SUMO research community gains a common reference set of urban signal and ramp metering methods.
- Experimental standards rise, lowering the chance that published results cannot be reproduced.
Where Pith is reading between the lines
- Widespread use could reduce the publication of results that appear strong only because of favorable random draws.
- The same emphasis on replication and statistics could be applied to other microscopic simulators, even though the paper limits itself to SUMO.
- Consistent benchmarking over time might identify which controllers maintain performance across varied network layouts and demand patterns.
Load-bearing premise
The framework implementations accurately reproduce the original controller logic from the literature, and the simulation scenarios adequately represent the sources of randomness present in real traffic.
What would settle it
An independent re-implementation of one controller such as ALINEA, run on the same network and random seeds, produces performance distributions that differ significantly from those generated by the framework.
Figures









read the original abstract
Reliable benchmarking is essential for progress in intelligent traffic control research. While microscopic traffic simulators such as SUMO enable detailed modelling of individual vehicle interactions, many published control studies still rely on single-run evaluations and project-specific baseline implementations, limiting reproducibility and comparability. This paper presents sumoITScontrol, an open-source and extensible Python framework providing a curated collection of widely used traffic controllers implemented for SUMO via the TraCI interface. The framework includes established methods for both urban and freeway traffic management, such as Max Pressure signal control, SCOOT/SCATS-inspired adaptive strategies, and ramp metering algorithms including ALINEA, HERO-inspired, and METALINE. Beyond providing implementations, the paper emphasises methodological best-practices for controller evaluation in stochastic microscopic environments. Through systematic calibration and replicated simulation experiments, we demonstrate the substantial impact of stochastic variability on performance metrics and highlight the necessity of variance-aware reporting and statistical hypothesis testing. By combining standardised controller implementations with reproducibility-oriented evaluation guidelines, sumoITScontrol aims to improve methodological transparency, enable fair benchmarking of novel approaches, and strengthen experimental standards within the SUMO and intelligent transportation systems research communities. Source Code on project's GitHub: https://github.com/DerKevinRiehl/sumoITScontrol/.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
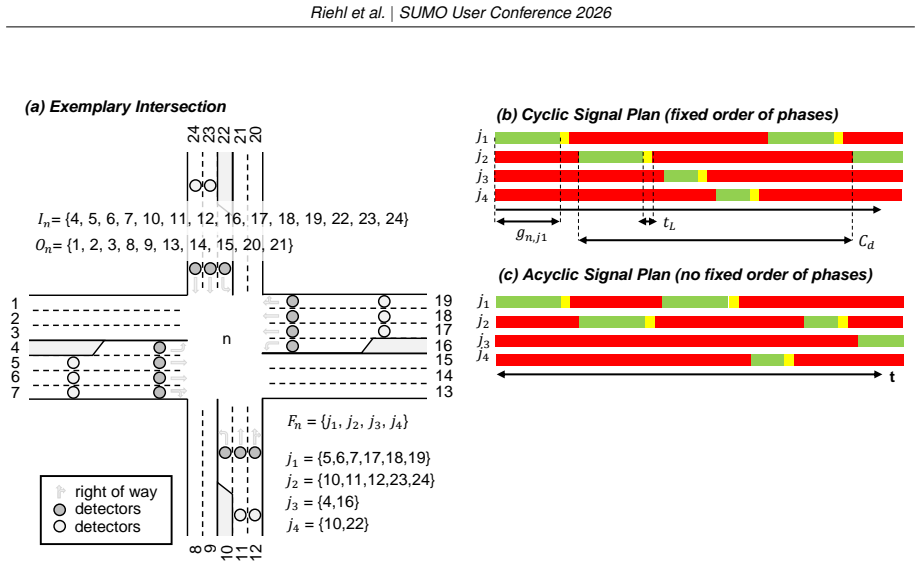
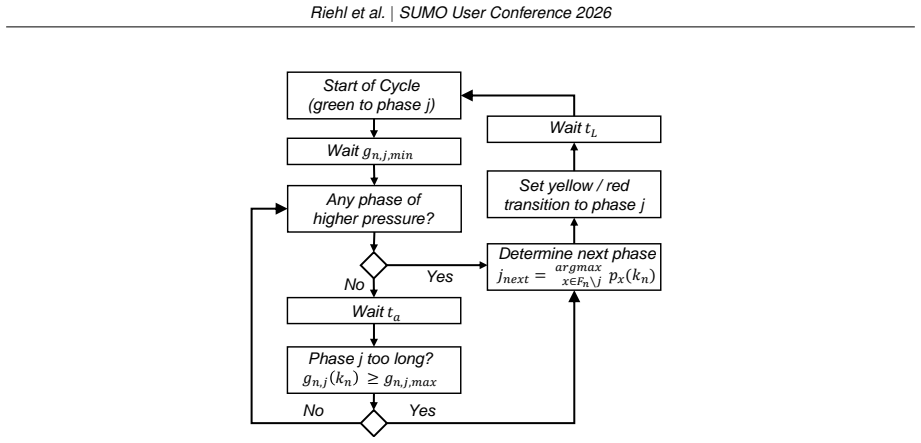
Summary. The paper presents sumoITScontrol, an open-source extensible Python framework offering a collection of traffic controllers for SUMO simulations via TraCI. It includes Max Pressure, SCOOT/SCATS-inspired, ALINEA, HERO, and METALINE controllers. The work stresses best practices for stochastic evaluation through calibration and replicated experiments, showing substantial impact of variability on metrics and the need for variance-aware reporting and hypothesis testing.
Significance. If the controller implementations faithfully reproduce the original algorithms and the replicated experiments are statistically sound, this framework addresses a clear gap in reproducibility for SUMO-based ITS research by supplying standardized baselines and promoting variance-aware evaluation practices. The open-source code and methodological emphasis could enable fairer benchmarking of new controllers.
major comments (1)
- [Controller Implementations] The paper supplies code for the controllers but does not report direct equivalence checks (e.g., matching control actions or performance on the exact scenarios from the source papers). If the implementations contain even modest deviations in state estimation, actuation timing, or parameter mapping, the observed variance in metrics could be an artifact of the framework rather than a general property of stochastic microscopic simulation. This is load-bearing for the central claim regarding the impact of stochastic variability.
minor comments (2)
- The GitHub link is provided but the manuscript would benefit from a permanent archive citation (e.g., Zenodo DOI) for the exact code version used in the reported experiments.
- A summary table listing each controller, its key parameters, original reference, and any modifications made in the TraCI implementation would improve clarity and usability.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. The feedback on controller fidelity is particularly valuable, as it directly relates to the interpretability of our stochastic evaluation results. We address the major comment below and will revise the manuscript accordingly.
read point-by-point responses
-
Referee: The paper supplies code for the controllers but does not report direct equivalence checks (e.g., matching control actions or performance on the exact scenarios from the source papers). If the implementations contain even modest deviations in state estimation, actuation timing, or parameter mapping, the observed variance in metrics could be an artifact of the framework rather than a general property of stochastic microscopic simulation. This is load-bearing for the central claim regarding the impact of stochastic variability.
Authors: We agree that explicit equivalence verification strengthens the central claim. In the revised manuscript we will add a dedicated subsection (new Section 3.3) that documents the implementation of each controller with direct references to the equations, state definitions, and parameter mappings from the source papers. Where the original publications provide deterministic test scenarios or reported performance values, we will include side-by-side comparisons of control actions and resulting metrics under identical deterministic conditions. These checks will be reported both in the text and as supplementary material. This addition will allow readers to confirm that the observed metric variance arises from the stochastic microscopic simulation rather than from implementation discrepancies. revision: yes
Circularity Check
Software framework and guidelines with no derivation chain
full rationale
The paper introduces an open-source Python framework for traffic controllers in SUMO and provides evaluation guidelines based on replicated stochastic simulations. No mathematical derivations, predictions, fitted parameters, or self-referential steps appear in the abstract or described content. The central claims rest on code provision and empirical demonstration of variability, which are self-contained contributions without reduction to inputs by construction. External validation of implementations is a separate reproducibility concern, not circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Intelligent transportation systems,
G. Dimitrakopoulos and P . Demestichas, “Intelligent transportation systems,”IEEE Vehicu- lar Technology Magazine, vol. 5, no. 1, pp. 77–84, 2010. DOI: 10.1109/MVT.2009.935537
-
[2]
Sensor technologies for intelli- gent transportation systems,
J. Guerrero-Ib´a˜nez, S. Zeadally, and J. Contreras-Castillo, “Sensor technologies for intelli- gent transportation systems,”Sensors, vol. 18, no. 4, p. 1212, 2018. DOI: 10.3390/s18041 212
-
[3]
The oversaturated intersection,
D. C. Gazis and R. B. Potts, “The oversaturated intersection,”Proceedings of the Second International Symposium on the Theory of Traffic Flow, pp. 221–237, 1963
work page 1963
-
[4]
A macroscopic modelling of traffic flow on the boulevard p ´eriph´erique in paris,
M. Papageorgiou, H. Hadj-Salem, and J. -M. Blosseville, “A macroscopic modelling of traffic flow on the boulevard p ´eriph´erique in paris,”Transportation Research Part B: Methodological, vol. 24, no. 6, pp. 345–359, 1990. DOI: 10.1016/0191-2615(89)90021-0
-
[5]
Model predictive control for optimal coordination of ramp metering and variable speed limits,
A. Hegyi, B. De Schutter, and H. Hellendoorn, “Model predictive control for optimal coordination of ramp metering and variable speed limits,”Transportation Research Part C: Emerging Technologies, vol. 13, no. 3, pp. 185–209, 2005. DOI: 10.1016/j.trc.2004.08.001
-
[6]
C. F . Daganzo, “The cell transmission model: A dynamic representation of highway traffic consistent with the hydrodynamic theory,”Transportation Research Part B: Methodological, vol. 28, no. 4, pp. 269–287, 1994. DOI: 10.1016/0191-2615(94)90002-7
-
[7]
Max pressure control of a network of signalized intersections,
P . Varaiya, “Max pressure control of a network of signalized intersections,”Transportation Research Part C: Emerging Technologies, vol. 36, pp. 177–195, 2013. DOI: 10.1016/j.trc .2013.08.014
-
[8]
Scoot-a traffic responsive method of coordinating signals,
P . Hunt, D. Robertson, R. Bretherton, and R. Winton, “Scoot-a traffic responsive method of coordinating signals,” Tech. Rep., 1981. [Online]. Available: https://trid.trb.org/View/179439
work page 1981
-
[9]
P . Lowrie, “Scats, sydney co-ordinated adaptive traffic system: A traffic responsive method of controlling urban traffic,”Transportation Research Records, 1990. [Online]. Available: https://trid.trb.org/View/488852
work page 1990
-
[10]
Alinea: A local feedback control law for on-ramp metering,
M. Papageorgiou, H. Hadj-Salem, J.-M. Blosseville, et al., “Alinea: A local feedback control law for on-ramp metering,”Transportation Research Record, vol. 1320, no. 1, pp. 58–67,
-
[11]
Available: https://onlinepubs.trb.org/Onlinepubs/trr/1991/1320/1320-008.p df
[Online]. Available: https://onlinepubs.trb.org/Onlinepubs/trr/1991/1320/1320-008.p df
work page 1991
-
[12]
Heuristic ramp-metering coordination strategy implemented at monash freeway, australia,
I. Papamichail, M. Papageorgiou, V. Vong, and J. Gaffney, “Heuristic ramp-metering coordination strategy implemented at monash freeway, australia,”Transportation Research Record, vol. 2178, no. 1, pp. 10–20, 2010. DOI: 10.3141/2178-02
-
[13]
M. Papageorgiou, J.-M. Blosseville, and H. Haj-Salem, “Modelling and real-time control of traffic flow on the southern part of boulevard p ´eriph´erique in paris: Part ii: Coordinated on-ramp metering,”Transportation Research Part A: General, vol. 24, no. 5, pp. 361–370,
-
[14]
Riehl et al.|SUMO User Conference 2026
DOI: 10.1016/0191-2607(90)90048-B. Riehl et al.|SUMO User Conference 2026
-
[15]
Microscopic traffic simulation using sumo,
P . A. Lopez et al., “Microscopic traffic simulation using sumo,” in2018 21st International Conference on Intelligent Transportation Systems (ITSC), 2018, pp. 2575–2582. DOI: 10.1109/ITSC.2018.8569938
-
[16]
A microscopic traffic simulator for evaluation of dynamic traffic management systems,
Q. Y ang and H. N. Koutsopoulos, “A microscopic traffic simulator for evaluation of dynamic traffic management systems,”Transportation Research Part C: Emerging Technologies, vol. 4, no. 3, pp. 113–129, 1996. DOI: 10.1016/S0968-090X(96)00006-X
-
[17]
J. Barcel´o, E. Codina, J. Casas, J. L. Ferrer, and D. Garc´ıa, “Microscopic traffic simulation: A tool for the design, analysis and evaluation of intelligent transport systems,”Journal of Intelligent and Robotic Systems, vol. 41, no. 2, pp. 173–203, 2005. DOI: 10.1007/s10846- 005-3808-2
-
[18]
Revisiting reproducibility in transportation simulation studies,
K. Riehl, A. Kouvelas, and M. A. Makridis, “Revisiting reproducibility in transportation simulation studies,”European Transport Research Review, vol. 17, no. 1, p. 22, 2025. DOI: 10.1186/s12544-025-00718-9
-
[19]
In: 2025 IEEE 64th Conference on Decision and Control (CDC)
K. Riehl, Y . Zhan, A. Kouvelas, and M. A. Makridis, “Eq-alinea–equitable ramp metering for sustainable metropolitan highways,” in2025 IEEE 64th Conference on Decision and Control (CDC), IEEE, 2025, pp. 4970–4975. DOI: 10.1109/CDC57313.2025.11312855
-
[20]
Freeway ramp metering: An overview,
M. Papageorgiou and A. Kotsialos, “Freeway ramp metering: An overview,”IEEE Trans- actions on Intelligent Transportation Systems, vol. 3, no. 4, pp. 271–281, 2002. DOI: 10.1109/TITS.2002.806803
-
[21]
A misapplication of the local ramp metering strategy alinea,
M. Papageorgiou, E. Kosmatopoulos, I. Papamichail, and Y . Wang, “A misapplication of the local ramp metering strategy alinea,”IEEE Transactions on Intelligent Transportation Systems, vol. 9, no. 2, pp. 360–365, 2008. DOI: 10.1109/TITS.2008.922975
-
[22]
Series of new local ramp metering strategies,
E. Smaragdis and M. Papageorgiou, “Series of new local ramp metering strategies,” Transportation Research Record, vol. 1856, no. 1, pp. 74–86, 2003. DOI: 10.3141/1856-0 8
-
[23]
H.-U. Oh, “Study of freeway merge bottlenecks and development of new local traffic- responsive ramp metering strategy,” Ph.D. dissertation, Michigan State University, 2000. [Online]. Available: https://www.proquest.com/openview/02340d088bf52539251e9fae8ac5 4c29/
work page 2000
-
[24]
C. Demiral and H. B. Celikoglu, “Application of alinea ramp control algorithm to freeway traffic flow on approaches to bosphorus strait crossing bridges,”Procedia-Social and Behavioral Sciences, vol. 20, pp. 364–371, 2011. DOI: 10.1016/j.sbspro.2011.08.042
-
[25]
A comparative evaluation of ramp metering controllers alinea and pi-alinea,
I. M. Abuamer, M. Sadat, and C. M. Tamp`ere, “A comparative evaluation of ramp metering controllers alinea and pi-alinea,” in2018 International Conference on Computational and Characterization Techniques in Engineering & Sciences (CCTES), IEEE, 2018, pp. 127–
work page 2018
-
[26]
DOI: 10.1109/CCTES.2018.8674110
-
[27]
R. L. Bertini, C. M. Monsere, O. Eshel, and S. Ahn, “Using archived its data to measure operational benefits of a system-wide adaptive ramp metering (swarm) system,”Portland State University. Department of Civil & Environmental Engineering, SPR 645 OTREC-RR- 08-04 2008. DOI: 10.15760/trec.152
-
[28]
Y . J. Stephanedes, “Implementation of on-line zone control strategies for optimal ramp metering in the minneapolis ring road,” inProceedings of Seventh International Conference on ‘Road Traffic Monitoring and Control’, 1994. DOI: 10.1049/cp:19940452
-
[29]
R. P . Roess, E. S. Prassas, and W. R. McShane,Traffic engineering. Pearson/Prentice Hall, 2004, ISBN: 978-0-13751-8-784
work page 2004
-
[30]
N. J. Garber, L. A. Hoel, and R. Sarkar,Traffic and highway engineering. Cengage Learning Toronto, 2009, ISBN: 978-1-33763-1-020
work page 2009
-
[31]
Green-pressure–a weighted queue-length approach towards sustainable intersection management,
K. Riehl, A. Kouvelas, and M. A. Makridis, “Green-pressure–a weighted queue-length approach towards sustainable intersection management,” in2025 IEEE 64th Conference on Decision and Control (CDC), IEEE, 2025, pp. 4964–4969. DOI: 10.1109/CDC57313.20 25.11312349. Riehl et al.|SUMO User Conference 2026
-
[32]
L. Tassiulas and A. Ephremides, “Stability properties of constrained queueing systems and scheduling policies for maximum throughput in multihop radio networks,” in29th IEEE Conference on Decision and Control, IEEE, 1990, pp. 2130–2132. DOI: 10.1109/CDC.199 0.204000
-
[33]
Maximum pressure controller for stabi- lizing queues in signalized arterial networks,
A. Kouvelas, J. Lioris, S. A. Fayazi, and P . Varaiya, “Maximum pressure controller for stabi- lizing queues in signalized arterial networks,”Transportation Research Record, vol. 2421, no. 1, pp. 133–141, 2014. DOI: 10.3141/2421-15
-
[34]
Max-pressure traffic controller based on travel times: An experimental analysis,
P . Mercader, W. Uwayid, and J. Haddad, “Max-pressure traffic controller based on travel times: An experimental analysis,”Transportation Research Part C: Emerging Technologies, vol. 110, pp. 275–290, 2020. DOI: 10.1016/j.trc.2019.10.002
-
[35]
L. Anderson, T. Pumir, D. Triantafyllos, and A. M. Bayen, “Stability and implementation of a cycle-based max pressure controller for signalized traffic networks,”Networks and Heterogeneous Media, vol. 13, no. 2, pp. 241–260, 2018. DOI: 10.3934/nhm.2018011
-
[36]
Stability of modified max pressure controller with application to signalized traffic networks,
T. Pumir, L. Anderson, D. Triantafyllos, and A. M. Bayen, “Stability of modified max pressure controller with application to signalized traffic networks,” in2015 American Control Conference (ACC), IEEE, 2015, pp. 1879–1886. DOI: 10.1109/ACC.2015.7171007
-
[37]
A survey on market-inspired intersection control methods for connected vehicles,
C. Iliopoulou, K. Kepaptsoglou, and E. I. Vlahogianni, “A survey on market-inspired intersection control methods for connected vehicles,”IEEE Intelligent Transportation Systems Magazine, vol. 15, no. 2, pp. 162–176, 2022. DOI: 10.1109/MITS.2022.3203573
-
[38]
F . V. Webster, “Traffic signal settings,”Road Research Technical Paper, no. 39, 1958. [Online]. Available: https://trid.trb.org/View/113579
work page 1958
-
[39]
Queues for a fixed-cycle traffic light,
G. F . Newell, “Queues for a fixed-cycle traffic light,”The Annals of Mathematical Statistics, pp. 589–597, 1960. [Online]. Available: https://www.jstor.org/stable/2237570
-
[40]
Optimal traffic light control for a single intersection,
B. De Schutter and B. De Moor, “Optimal traffic light control for a single intersection,” European Journal of Control, vol. 4, no. 3, pp. 260–276, 1998. DOI: 10.1016/S0947-3580 (98)70119-0
-
[41]
Traffic light control by multiagent rein- forcement learning systems,
B. Bakker, S. Whiteson, L. Kester, and F . C. Groen, “Traffic light control by multiagent rein- forcement learning systems,” inInteractive Collaborative Information Systems, Springer, 2010, pp. 475–510. DOI: 10.1007/978-3-642-11688-9 18
-
[42]
D. BMDV DLR, “Verkehr in zahlen 2024/2025,”Statistisches Handbuch des Kraftfahrt- Bundesamtes, 2024. [Online]. Available: https://www.bmv.de/SharedDocs/DE/Anlage/G/v erkehr-in-zahlen24-25-pdf
work page 2024
-
[43]
Student, “The probable error of a mean,”Biometrika, vol. 6, no. 1, pp. 1–25, 1908. DOI: 10.1093/biomet/6.1.1
-
[44]
S. M. Ross,Introduction to Probability and Statistics for Engineers and Scientists, 5th ed. Academic Press, 2014, ISBN: 978-0-12394-842-7. DOI: 10.1016/C2013-0-19397-X
-
[45]
Biometrics Bulletin , author =
F . Wilcoxon, “Individual comparisons by ranking methods,”Biometrics Bulletin, vol. 1, no. 6, pp. 80–83, 1945. DOI: 10.2307/3001968
-
[46]
The Annals of Mathematical Statistics , author =
H. B. Mann and D. R. Whitney, “On a test of whether one of two random variables is stochastically larger than the other,”The Annals of Mathematical Statistics, vol. 18, no. 1, pp. 50–60, 1947. DOI: 10.1214/aoms/1177730491
-
[47]
FGSV,Hinweise zur mikroskopischen Verkehrsflussimulation - Grundlagen und Anwen- dung. FGSV Verlag, Forschungsgesellschaft f¨ur Strassen- und Vekehrswesen - Arbeits- gruppe Verkehrsf¨uhrung und Verkehrssicherheit, 2006, ISBN: 3-939715-11-5
work page 2006
-
[48]
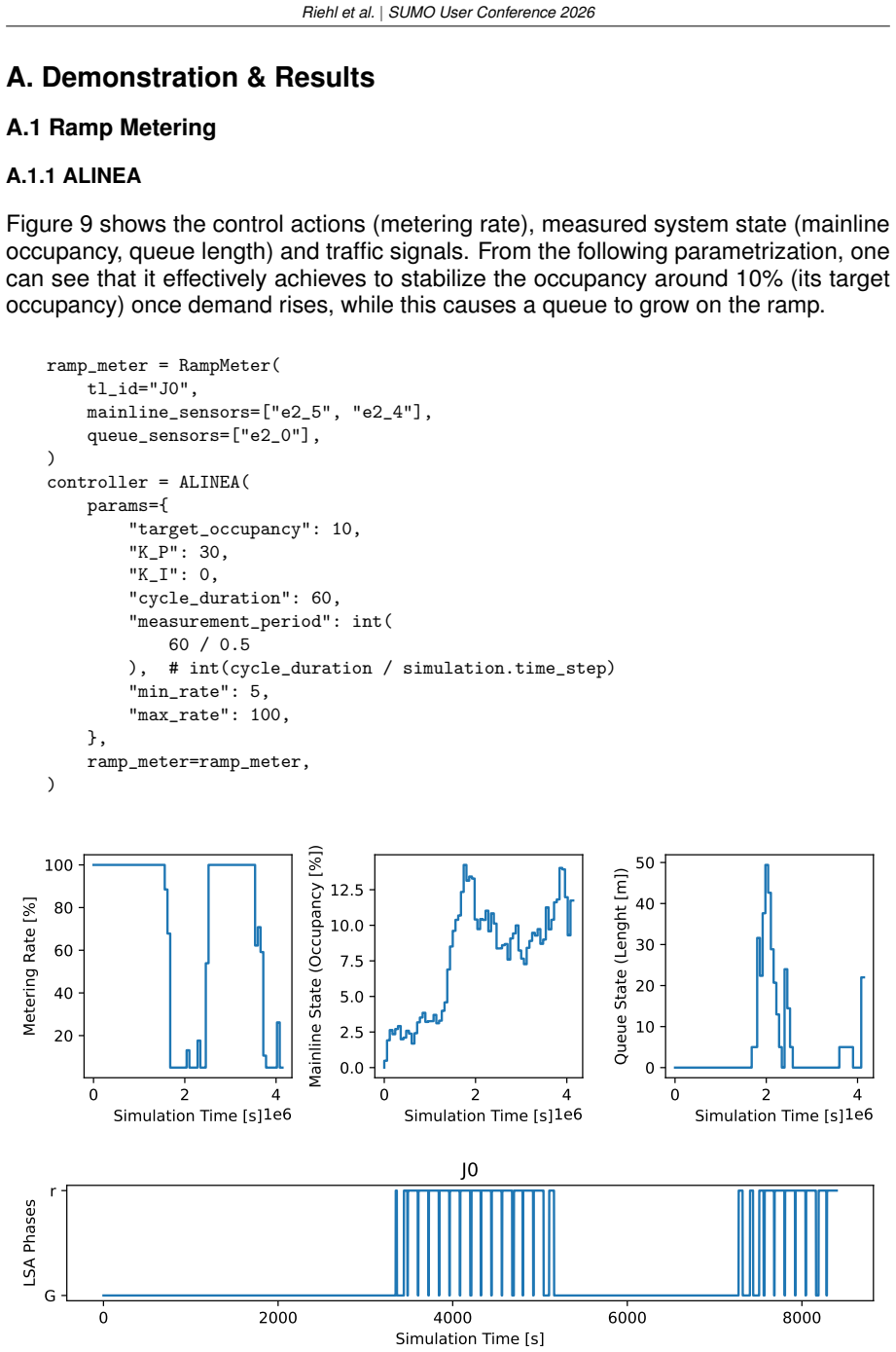
R. Dowling, “Traffic analysis toolbox volume vi: Definition, interpretation, and calculation of traffic analysis tools measures of effectiveness,” 2007. [Online]. Available: https://rosap.ntl .bts.gov/view/dot/42195/dot 42195 DS1.pdf Riehl et al.|SUMO User Conference 2026 A. Demonstration & Results A.1 Ramp Metering A.1.1 ALINEA Figure 9 shows the control...
work page 2007
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.