Recognition: unknown
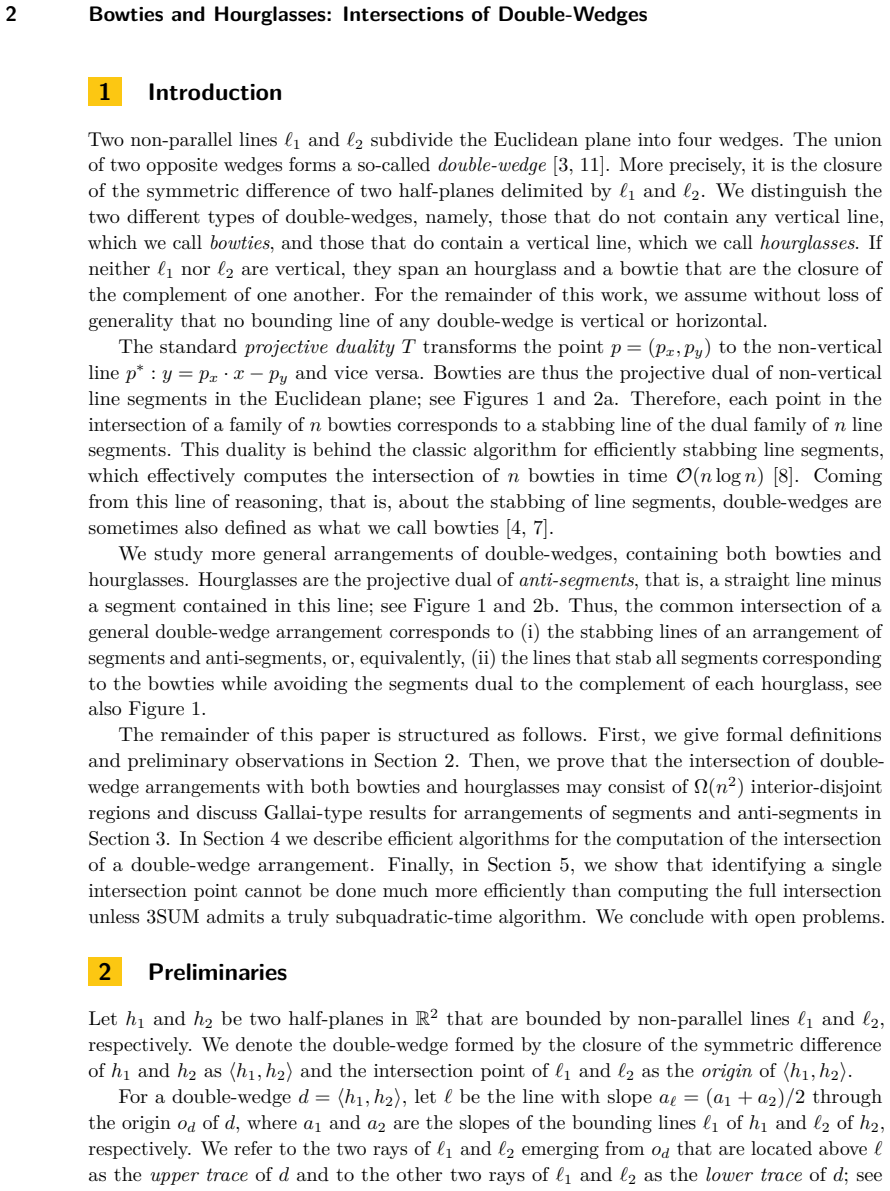
Bowties and Hourglasses: Intersections of Double-Wedges (or Stabbing and Avoiding Line Segments)
Pith reviewed 2026-05-08 06:50 UTC · model grok-4.3
The pith
The common intersection of n double-wedges mixing bowties and hourglasses can split into Ω(n²) interior-disjoint regions.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
In the generalized setting of double-wedge arrangements that include both bowties and hourglasses, the common intersection of n such double-wedges may consist of Ω(n²) interior-disjoint regions. Algorithms compute this intersection in worst-case optimal running time, and a single intersection point can be found in almost optimal time assuming no truly subquadratic algorithm for 3SUM. A point in the intersection corresponds to a line that stabs segments S corresponding to bowties and avoids segments A from the hourglasses. Gallai-type results for arrangements of segments and anti-segments are also discussed.
What carries the argument
Mixed bowtie-hourglass double-wedges under point-line duality, where a common intersection point equates to a line stabbing one set of segments while avoiding another.
If this is right
- The intersection of n double-wedges can be computed in time matching the quadratic size of the output.
- Locating any single point inside the intersection requires essentially quadratic time under the 3SUM hypothesis.
- Gallai-type statements hold for the dual problem of stabbing some segments while avoiding others.
- The quadratic lower bound on the number of regions forces any exact algorithm to output Ω(n²) complexity in the worst case.
Where Pith is reading between the lines
- The same duality reduction may transfer quadratic lower bounds to other stabbing-avoidance problems in the plane.
- Similar complexity jumps could appear when other geometric objects are allowed to mix two topologically distinct types.
- The optimal algorithms described here give a practical baseline for implementing stabbing queries on moderate-sized segment sets.
Load-bearing premise
The point-line duality continues to equate a point in every double-wedge with a stabbing-avoiding line even when bowties and hourglasses are freely mixed.
What would settle it
An explicit collection of n bowties and hourglasses whose common intersection consists of o(n²) interior-disjoint regions, or a truly subquadratic algorithm for finding one intersection point that does not rely on the 3SUM hardness assumption.
Figures
read the original abstract
We study the common intersection of arrangements of double-wedges. We consider arrangements where double-wedges may be either bowties (which do not contain a vertical line) or hourglasses (which contain a vertical line), in contrast to earlier studies that focused on arrangements of only bowties. This generalization changes the setting drastically, in particular, with respect to all arguments involving the point-line duality. Namely, a point in the intersection of all double-wedges is equivalent to a line that stabs a set of segments $\mathcal{S}$ (corresponding to the bowties) while it avoids a different set of segments $\mathcal{A}$ (corresponding to the complement of the hourglasses). We show that in this general setting, the intersection of $n$ double-wedges may consist of $\Omega(n^2)$ interior-disjoint regions. Further, we discuss Gallai-type results for arrangements of segments and anti-segments, and we provide algorithms for computing the intersection of such arrangements with worst-case optimal running time. Finally, we also prove that we can find a single intersection point in almost optimal running time, assuming that 3SUM admits no truly subquadratic-time algorithm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript examines the common intersection of arrangements of n double-wedges that may be bowties (no vertical line) or hourglasses (contain a vertical line). It claims that the intersection can consist of Ω(n²) interior-disjoint regions, discusses Gallai-type results for segments and anti-segments, provides worst-case optimal algorithms for computing the full intersection, and gives an almost-optimal algorithm for finding one intersection point under the 3SUM-hardness assumption. The central technical device is a re-defined point-line duality equating a point in the common intersection to a line that stabs all segments in S (from bowties) and avoids all segments in A (from hourglass complements).
Significance. If the new duality equivalence is rigorously established for the mixed setting, the Ω(n²) combinatorial bound and the matching optimal-time algorithms constitute a meaningful extension of prior bowtie-only results. The 3SUM-based conditional lower bound for detecting a single intersection point is also a useful addition to the literature on geometric stabbing and avoidance problems.
major comments (1)
- [Duality transformation and equivalence (likely §2–3)] The equivalence between membership in the common intersection and the existence of a stabbing/avoiding line (stated in the abstract and used throughout) must be shown to handle vertical lines and all boundary cases where an hourglass boundary coincides with the vertical through the dual point. Because the abstract explicitly states that the mixed bowtie-hourglass setting 'changes the setting drastically' with respect to all prior duality arguments, any gap here would directly affect both the Ω(n²) lower-bound construction and the claimed optimal running times of the algorithms.
minor comments (1)
- [Introduction] Notation for bowties versus hourglasses and for the sets S and A should be introduced with a single consistent figure early in the paper.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address the major comment below.
read point-by-point responses
-
Referee: [Duality transformation and equivalence (likely §2–3)] The equivalence between membership in the common intersection and the existence of a stabbing/avoiding line (stated in the abstract and used throughout) must be shown to handle vertical lines and all boundary cases where an hourglass boundary coincides with the vertical through the dual point. Because the abstract explicitly states that the mixed bowtie-hourglass setting 'changes the setting drastically' with respect to all prior duality arguments, any gap here would directly affect both the Ω(n²) lower-bound construction and the claimed optimal running times of the algorithms.
Authors: We agree that the equivalence must be rigorously established for vertical lines and all boundary cases, given the mixed setting and the abstract's statement that it changes the duality arguments drastically. The manuscript redefines the point-line duality in Section 2 to equate a point in the common intersection with a line stabbing segments in S (from bowties) and avoiding segments in A (from hourglass complements). However, we acknowledge that the current presentation may not explicitly enumerate every boundary case. In the revised manuscript we will add a dedicated case analysis in §2 proving the equivalence holds when the dual line is vertical (consistent with hourglasses containing a vertical line by definition) and when an hourglass boundary coincides with the vertical through the dual point. The analysis will distinguish closed versus open wedges to confirm exact correspondence with intersection membership. This clarification strengthens the foundation but leaves the Ω(n²) bound, Gallai-type results, and the optimal-time algorithms unchanged, as the additional cases are resolved within the existing combinatorial and algorithmic framework. revision: yes
Circularity Check
No circularity; duality equivalence and bounds are independently derived
full rationale
The paper states the point-line duality equivalence for the mixed bowtie-hourglass case as a direct geometric correspondence (a point in the common intersection iff the dual line stabs S and avoids A). This is not self-definitional or fitted; it is a rephrasing that enables the subsequent combinatorial and algorithmic results. The Ω(n²) lower bound follows from explicit construction of arrangements, the algorithms achieve worst-case optimal time via standard sweep or divide-and-conquer techniques on the dual segments, and the single-point finding uses a 3SUM-hardness reduction that is external and conditional. No load-bearing self-citation, ansatz smuggling, or renaming of known results occurs; the generalization is handled explicitly without reducing claims to their own inputs by construction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Point-line duality maps the intersection of double-wedges to lines stabbing some segments while avoiding others, even when hourglasses are included.
Reference graph
Works this paper leans on
-
[1]
Abboud and V
1A. Abboud and V. Vassilevska Williams. Popular conjectures imply strong lower bounds for dynamic problems. In55th IEEE Annual Symposium on Foundations of Computer Science (FOCS 2014), pages 434–443,
2014
-
[2]
Pătraşcu
14 M. Pătraşcu. Towards polynomial lower bounds for dynamic problems. In L. J. Schulman, editor,Proceedings of the 42nd ACM Symposium on Theory of Computing, (STOC 2010), pages 603–610,
2010
-
[3]
15 C. D. Toth, J. O’Rourke, and J. E. Goodman.Handbook of Discrete and Computational Geometry. CRC press, third edition, 2017
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.