Recognition: unknown
QuietWalk: Physics-Informed Reinforcement Learning for Ground Reaction Force-Aware Humanoid Locomotion Under Diverse Footwear
Pith reviewed 2026-05-08 06:01 UTC · model grok-4.3
The pith
QuietWalk trains humanoid robots to walk quietly by penalizing predicted ground reaction forces during reinforcement learning.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
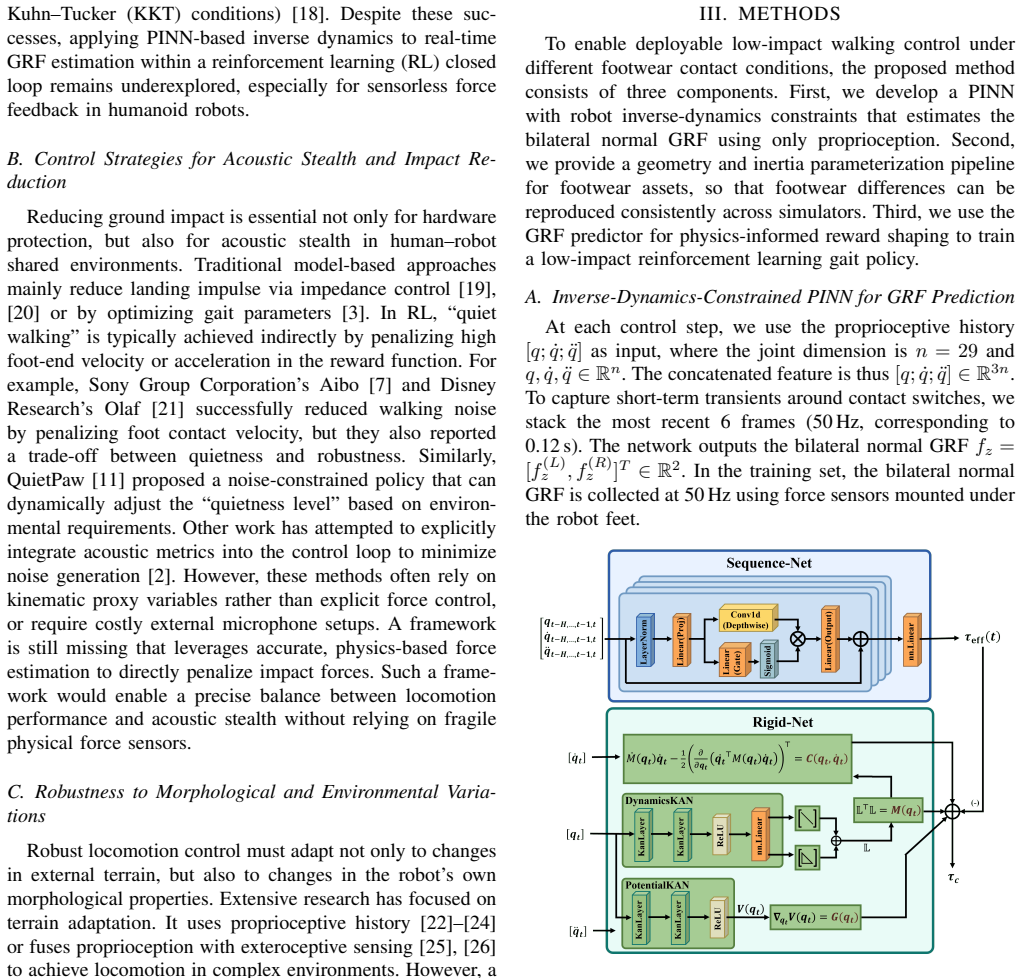
QuietWalk employs an inverse-dynamics-constrained physics-informed neural network to estimate per-foot vertical ground reaction forces from proprioceptive signals alone. The frozen predictor is integrated into the RL training loop to penalize predicted impact forces. On hardware at 1.2 m/s barefoot averaged over four floor materials, this produces a 7.17 dB drop in mean A-weighted noise level and a 4.98 dB drop in peak noise level. Enforcing inverse-dynamics consistency cuts vertical GRF prediction errors by 82-86 percent and raises the coefficient of determination to 0.99 for both left and right feet on held-out data.
What carries the argument
inverse-dynamics-constrained physics-informed neural network that estimates vertical ground reaction forces from proprioception to supply the penalty term in the RL reward
If this is right
- The robot can be trained without any force sensors mounted at deployment time.
- The same policy adapts to barefoot, sneakers, skate shoes, and high heels on multiple surfaces.
- Both average and peak noise levels drop measurably on physical hardware at walking speed.
- GRF estimation reaches R-squared values of 0.99 once inverse-dynamics constraints are added to the predictor.
Where Pith is reading between the lines
- The same penalty structure could be added to other contact-heavy skills such as stair climbing or object carrying to limit vibration.
- Running the policy at higher speeds or on soft carpets would test whether the noise reduction trades off against balance.
- Transferring the trained PINN to a different humanoid body would show how much retraining the force estimator needs.
- Combining the force penalty with energy-efficiency rewards could produce policies that are both quiet and low-power.
Load-bearing premise
The frozen inverse-dynamics-constrained PINN will keep predicting actual ground reaction forces accurately when the learned policy is running on real hardware across varied footwear and surfaces.
What would settle it
Record actual vertical ground reaction forces with external force plates while the robot runs the QuietWalk policy and check whether the PINN predictions match the measured forces within the reported error bounds while noise levels remain reduced.
Figures







read the original abstract
Humanoid robots operating in human-centered environments (e.g., homes, hospitals, and offices) must mitigate foot--ground impact transients, as impact-induced vibration and noise degrade user experience and repeated impacts accelerate hardware wear. However, existing low-noise locomotion training often relies on kinematic proxy objectives or fragile force sensors, and footwear-induced changes in contact dynamics introduce distribution shifts that hinder policy generalization.We present QuietWalk, a physics-informed reinforcement learning framework for ground-reaction-force-aware humanoid locomotion under diverse footwear conditions. QuietWalk employs an inverse-dynamics-constrained physics-informed neural network (PINN) to estimate per-foot vertical ground reaction forces (GRFs) from proprioceptive signals, and integrates the frozen predictor into the RL training loop to penalize predicted impact forces without requiring force sensors at deployment.On a held-out real-robot dataset, enforcing inverse-dynamics consistency reduces vertical GRF prediction errors by 82%-86% compared with a purely supervised predictor and improves the coefficient of determination from 0.39/0.67 to 0.99/0.99 for the left/right feet. On hardware at 1.2 m/s (barefoot; averaged over four floor materials), QuietWalk reduces mean A-weighted noise level by 7.17 dB and peak noise level by 4.98 dB under a consistent recording setup. Cross-footwear experiments (barefoot, skate shoes, athletic sneakers, and high heels) across multiple surfaces further demonstrate robust adaptation to footwear-induced contact variations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents QuietWalk, a physics-informed RL framework for humanoid locomotion that trains an inverse-dynamics-constrained PINN on proprioceptive signals to predict vertical GRFs, freezes the predictor, and uses it as a penalty term in the RL objective to reduce impact forces and noise. It reports 82-86% reduction in GRF prediction error and R² improvement to 0.99 on a held-out real-robot dataset, plus 7.17 dB mean and 4.98 dB peak A-weighted noise reduction on hardware at 1.2 m/s for barefoot walking across four floor materials, with qualitative claims of robust adaptation under diverse footwear.
Significance. If the central claims hold, the work offers a practical route to quieter, sensor-free humanoid operation in human environments by embedding physics-based GRF awareness directly into policy training. The quantified noise reductions and the use of a frozen PINN to avoid fragile force sensors at deployment represent concrete engineering advances with potential to reduce both user disturbance and hardware wear.
major comments (3)
- [Abstract] Abstract: The headline hardware noise reductions (7.17 dB mean, 4.98 dB peak at 1.2 m/s) are reported exclusively for barefoot conditions averaged over four floor materials. No corresponding quantitative GRF prediction errors, R² values, or A-weighted noise levels are supplied for skate shoes, sneakers, or high heels; these experiments are described only as showing “robust adaptation.” This gap is load-bearing for the title and abstract claim of handling diverse footwear.
- [§3 (PINN and inverse-dynamics constraint)] PINN training and held-out dataset: The inverse-dynamics-constrained PINN is trained on a held-out real-robot dataset whose footwear composition is unspecified. Without per-footwear breakdowns of the reported 82%-86% error reduction or the R² gains (0.39/0.67 to 0.99/0.99), it remains unclear whether the predictor remains accurate when contact stiffness and damping change with different shoes, undermining the causal link from the RL penalty to actual noise reduction.
- [Hardware Experiments] Hardware evaluation: The manuscript provides no error bars, trial counts, or statistical significance tests for the noise measurements, and no ablation isolating the contribution of the frozen PINN penalty versus other reward terms. These omissions make it difficult to judge whether the observed noise reductions are robust or reproducible across runs.
minor comments (1)
- [Abstract] The abstract states results are “averaged over four floor materials” but does not specify microphone placement, room acoustics, or exact flooring properties, which would aid reproducibility of the dB figures.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback on our manuscript. We address each major comment point by point below, indicating planned revisions where appropriate to strengthen the presentation.
read point-by-point responses
-
Referee: [Abstract] Abstract: The headline hardware noise reductions (7.17 dB mean, 4.98 dB peak at 1.2 m/s) are reported exclusively for barefoot conditions averaged over four floor materials. No corresponding quantitative GRF prediction errors, R² values, or A-weighted noise levels are supplied for skate shoes, sneakers, or high heels; these experiments are described only as showing “robust adaptation.” This gap is load-bearing for the title and abstract claim of handling diverse footwear.
Authors: We appreciate this observation. The quantitative noise reduction results (7.17 dB mean and 4.98 dB peak) are indeed reported exclusively for barefoot walking averaged across the four floor materials, as this constituted the primary condition for controlled hardware measurement. The cross-footwear experiments (skate shoes, athletic sneakers, and high heels) were included to demonstrate that the policy enables stable locomotion despite footwear-induced changes in contact dynamics, but quantitative noise data were not collected for those cases. We will revise the abstract to explicitly distinguish the quantitative barefoot results from the qualitative demonstration of adaptation, thereby clarifying the scope of the claims regarding diverse footwear. revision: yes
-
Referee: [§3 (PINN and inverse-dynamics constraint)] PINN training and held-out dataset: The inverse-dynamics-constrained PINN is trained on a held-out real-robot dataset whose footwear composition is unspecified. Without per-footwear breakdowns of the reported 82%-86% error reduction or the R² gains (0.39/0.67 to 0.99/0.99), it remains unclear whether the predictor remains accurate when contact stiffness and damping change with different shoes, undermining the causal link from the RL penalty to actual noise reduction.
Authors: The held-out real-robot dataset for PINN training and evaluation was collected exclusively under barefoot conditions on multiple floor surfaces. We therefore do not possess per-footwear breakdowns of the GRF prediction error reductions or R² values for skate shoes, sneakers, or high heels, as those footwear types were not represented in the training or held-out data. The reported 82-86% error reduction and R² improvement to 0.99 apply specifically to the barefoot held-out set. The inverse-dynamics constraint is designed to enforce physical consistency in the GRF estimator from proprioceptive inputs. We will add a clarifying statement in §3 specifying the barefoot composition of the dataset and noting that the hardware noise reductions were measured under the same barefoot conditions used for PINN evaluation. revision: partial
-
Referee: [Hardware Experiments] Hardware evaluation: The manuscript provides no error bars, trial counts, or statistical significance tests for the noise measurements, and no ablation isolating the contribution of the frozen PINN penalty versus other reward terms. These omissions make it difficult to judge whether the observed noise reductions are robust or reproducible across runs.
Authors: We agree that the hardware evaluation section would benefit from greater statistical rigor. The reported noise levels were obtained from repeated trials under a consistent recording setup, and we will revise the manuscript to include error bars, specify the number of trials per condition, and report statistical significance tests. We will also add an ablation study comparing the full QuietWalk reward (including the frozen PINN GRF penalty) against a baseline without the GRF penalty term to isolate its contribution to the observed noise reductions. revision: yes
- Per-footwear breakdowns of GRF prediction errors and R² values for the PINN, as the held-out training dataset contained only barefoot data and did not include skate shoes, sneakers, or high heels.
Circularity Check
No circularity: GRF predictor trained and validated independently before frozen use in RL
full rationale
The paper trains an inverse-dynamics-constrained PINN on a held-out real-robot dataset, reports explicit error reduction (82-86%) and R² gains (0.39/0.67 to 0.99/0.99) as validation, then freezes it for use as an RL penalty term. Hardware noise reductions (7.17 dB mean, 4.98 dB peak) are measured outcomes, not derived quantities. No equation or claim reduces a result to its own inputs by construction, no self-citation is load-bearing for the central claims, and the derivation chain remains externally falsifiable via the held-out dataset and physical measurements.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Exploring consequential robot sound: Should we make robots quiet and kawaii- et?
B. J. Zhang, K. Peterson, C. A. Sanchez, and N. T. Fitter, “Exploring consequential robot sound: Should we make robots quiet and kawaii- et?” in2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2021, pp. 3056–3062
2021
-
[2]
Minimizing acoustic noise: Enhancing quiet locomotion for quadruped robots in indoor applica- tions,
Z. Cao, B. Nie, Y . Zhang, and Y . Gao, “Minimizing acoustic noise: Enhancing quiet locomotion for quadruped robots in indoor applica- tions,”arXiv preprint arXiv:2506.23114, 2025
-
[3]
Learning impulse-reduced gait for quadruped robot using cma-es,
J. Ahn, E. Im, and Y . Lee, “Learning impulse-reduced gait for quadruped robot using cma-es,” in2023 20th International Conference on Ubiquitous Robots (UR). IEEE, 2023, pp. 261–266
2023
-
[4]
Influences of heel height on human postural stability and functional mobility between inexperienced and experienced high heel shoe wearers,
Y . Chen, J. X. Li, and L. Wang, “Influences of heel height on human postural stability and functional mobility between inexperienced and experienced high heel shoe wearers,”PeerJ, vol. 8, p. e10239, 2020
2020
-
[5]
Rapid locomotion via reinforcement learning,
G. B. Margolis, G. Yang, K. Paigwar, T. Chen, and P. Agrawal, “Rapid locomotion via reinforcement learning,”The International Journal of Robotics Research, vol. 43, no. 4, pp. 572–587, 2024
2024
-
[6]
Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control,
Z. Li, X. B. Peng, P. Abbeel, S. Levine, G. Berseth, and K. Sreenath, “Reinforcement learning for versatile, dynamic, and robust bipedal locomotion control,”The International Journal of Robotics Research, vol. 44, no. 5, pp. 840–888, 2025
2025
-
[7]
Learning quiet walking for a small home robot,
R. Watanabe, T. Miki, F. Shi, Y . Kadokawa, F. Bjelonic, K. Kawa- harazuka, A. Cramariuc, and M. Hutter, “Learning quiet walking for a small home robot,” inProceedings of the 2025 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2025, pp. 15 285–15 291
2025
-
[8]
Inverse dynamics calculations during gait with restricted ground reaction force information from pressure insoles,
A. Forner-Cordero, H. Koopman, and F. Van der Helm, “Inverse dynamics calculations during gait with restricted ground reaction force information from pressure insoles,”Gait & posture, vol. 23, no. 2, pp. 189–199, 2006
2006
-
[9]
Estimation of ground reaction forces and moments during gait using only inertial motion capture,
A. Karatsidis, G. Bellusci, H. M. Schepers, M. De Zee, M. S. Andersen, and P. H. Veltink, “Estimation of ground reaction forces and moments during gait using only inertial motion capture,”Sensors, vol. 17, no. 1, p. 75, 2016
2016
-
[10]
Ground reaction force sensor fault detection and recovery method based on virtual force sensor for walking biped robots,
I. Hashlamon and K. Erbatur, “Ground reaction force sensor fault detection and recovery method based on virtual force sensor for walking biped robots,” in2013 9th Asian Control Conference (ASCC). IEEE, 2013, pp. 1–6
2013
-
[11]
Quietpaw: Learning quadrupedal locomotion with versatile noise preference alignment,
Y . Zhang, Y . Yao, S. Liu, Y . Niu, C. Lin, Y . Yang, W. Yu, T. Zhang, J. Tan, and D. Zhao, “Quietpaw: Learning quadrupedal locomotion with versatile noise preference alignment,” inProceedings of the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 12 561–12 568
2025
-
[12]
Effect on the parameters of the high-heel shoe and transfer time of ground reaction force during level walking,
S.-H. Hyun, Y .-P. Kim, and C.-C. Ryew, “Effect on the parameters of the high-heel shoe and transfer time of ground reaction force during level walking,”Journal of exercise rehabilitation, vol. 12, no. 5, p. 451, 2016
2016
-
[13]
Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,
M. Raissi, P. Perdikaris, and G. E. Karniadakis, “Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations,” Journal of Computational physics, vol. 378, pp. 686–707, 2019
2019
-
[14]
Neu- ral networks with physics-informed architectures and constraints for dynamical systems modeling,
F. Djeumou, C. Neary, E. Goubault, S. Putot, and U. Topcu, “Neu- ral networks with physics-informed architectures and constraints for dynamical systems modeling,” inLearning for Dynamics and Control Conference. PMLR, 2022, pp. 263–277
2022
-
[15]
Physics-informed neural networks to model and control robots: A theoretical and experimental investigation,
J. Liu, P. Borja, and C. Della Santina, “Physics-informed neural networks to model and control robots: A theoretical and experimental investigation,”Advanced Intelligent Systems, vol. 6, no. 5, p. 2300385, 2024
2024
-
[16]
Estimation of lower extremity joint moments and 3d ground reaction forces using imu sensors in multiple walking conditions: A deep learning approach,
M. S. B. Hossain, Z. Guo, and H. Choi, “Estimation of lower extremity joint moments and 3d ground reaction forces using imu sensors in multiple walking conditions: A deep learning approach,”IEEE journal of biomedical and health informatics, vol. 27, no. 6, pp. 2829–2840, 2023
2023
-
[17]
Mysteric-net: Mimo hysteretic friction-aware lagrangian-based network for legged robot,
H. Yeo, J. Hong, T. Kong, and S. Oh, “Mysteric-net: Mimo hysteretic friction-aware lagrangian-based network for legged robot,” in2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2025, pp. 1932–1937
2025
-
[18]
Solving forward and inverse problems of contact mechanics using physics-informed neural net- works,
T. Sahin, M. von Danwitz, and A. Popp, “Solving forward and inverse problems of contact mechanics using physics-informed neural net- works,”Advanced Modeling and Simulation in Engineering Sciences, vol. 11, no. 1, p. 11, 2024
2024
-
[19]
Preemptive foot compliance to lower impact during biped robot walking over unknown terrain,
J. R. Guadarrama-Olvera, S. Kajita, and G. Cheng, “Preemptive foot compliance to lower impact during biped robot walking over unknown terrain,”IEEE Robotics and Automation Letters, vol. 7, no. 3, pp. 8006–8011, 2022
2022
-
[20]
Impedance control of a compliant robotic leg for reducing landing ground impact,
J. Zhu, Y . Hu, Y . Chen, and J. Chen, “Impedance control of a compliant robotic leg for reducing landing ground impact,” inIECON 2024-50th Annual Conference of the IEEE Industrial Electronics Society. IEEE, 2024, pp. 1–6
2024
-
[21]
Olaf: Bringing an animated character to life in the physical world,
D. M ¨uller, E. Knoop, D. Mylonopoulos, A. Serifi, M. A. Hopkins, R. Grandia, and M. B ¨acher, “Olaf: Bringing an animated character to life in the physical world,”arXiv preprint arXiv:2512.16705, 2025
-
[22]
Adapt- ing rapid motor adaptation for bipedal robots,
A. Kumar, Z. Li, J. Zeng, D. Pathak, K. Sreenath, and J. Malik, “Adapt- ing rapid motor adaptation for bipedal robots,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). IEEE, 2022, pp. 1161–1168
2022
-
[23]
DreamWaQ: Learning robust quadrupedal locomotion with implicit terrain imagination via deep re- inforcement learning,
I. Nahrendra, B. Yu, and H. Myung, “DreamWaQ: Learning robust quadrupedal locomotion with implicit terrain imagination via deep re- inforcement learning,” inProceedings of the 2023 IEEE International Conference on Robotics and Automation (ICRA). IEEE, 2023, pp. 5078–5084
2023
-
[24]
Real-world humanoid locomotion with reinforcement learning,
I. Radosavovic, T. Xiao, B. Zhang, T. Darrell, J. Malik, and K. Sreenath, “Real-world humanoid locomotion with reinforcement learning,”Science Robotics, vol. 9, no. 89, p. eadi9579, 2024
2024
-
[25]
Learning robust perceptive locomotion for quadrupedal robots in the wild,
T. Miki, J. Lee, J. Hwangbo, L. Wellhausen, V . Koltun, and M. Hutter, “Learning robust perceptive locomotion for quadrupedal robots in the wild,”Science robotics, vol. 7, no. 62, p. eabk2822, 2022
2022
-
[26]
Legged locomotion in challenging terrains using egocentric vision,
A. Agarwal, A. Kumar, J. Malik, and D. Pathak, “Legged locomotion in challenging terrains using egocentric vision,” inConference on robot learning. PMLR, 2023, pp. 403–415
2023
-
[27]
Effects of foot stiffness and damping on walking robot performance,
E. Schumann, N. Smit-Anseeuw, P. Zaytsev, R. Gleason, K. A. Shorter, and C. D. Remy, “Effects of foot stiffness and damping on walking robot performance,” in2019 International Conference on Robotics and Automation (ICRA). IEEE, 2019, pp. 3698–3704
2019
-
[28]
Analytical model and experimental testing of the softfoot: an adaptive robot foot for walking over obstacles and irregular terrains,
C. Piazza, C. Della Santina, G. Grioli, A. Bicchi, and M. G. Catalano, “Analytical model and experimental testing of the softfoot: an adaptive robot foot for walking over obstacles and irregular terrains,”IEEE Transactions on Robotics, vol. 40, pp. 3290–3305, 2024
2024
-
[29]
Adjustable compliance footwear technology to investigate gait adaptation,
M. Price, C. Robbins, S. Szemethy, B. Abdikadirova, G. Olson, W. Hoogkamer, and M. E. Huber, “Adjustable compliance footwear technology to investigate gait adaptation,”bioRxiv, pp. 2025–03, 2025
2025
-
[30]
arXiv preprint arXiv:1907.04490 , year=
M. Lutter, C. Ritter, and J. Peters, “Deep lagrangian networks: Using physics as model prior for deep learning,”arXiv preprint arXiv:1907.04490, 2019
-
[31]
A lie group formulation of robot dynamics,
F. C. Park, J. E. Bobrow, and S. R. Ploen, “A lie group formulation of robot dynamics,”The International journal of robotics research, vol. 14, no. 6, pp. 609–618, 1995
1995
-
[32]
Kolmogorov-arnold networks: Key developments and uses,
B. H. Kilani, “Kolmogorov-arnold networks: Key developments and uses,”Qeios, 2024
2024
-
[33]
Review of the damped least-squares inverse kinematics with experiments on an industrial robot manipulator,
S. Chiaverini, B. Siciliano, and O. Egeland, “Review of the damped least-squares inverse kinematics with experiments on an industrial robot manipulator,”IEEE Transactions on control systems technology, vol. 2, no. 2, pp. 123–134, 1994
1994
-
[34]
Ncbi bookshelf: books and documents in life sciences and health care,
M. A. Hoeppner, “Ncbi bookshelf: books and documents in life sciences and health care,”Nucleic acids research, vol. 41, no. D1, pp. D1251–D1260, 2012
2012
-
[35]
Loudness, its definition, measurement and calculation,
H. Fletcher and W. A. Munson, “Loudness, its definition, measurement and calculation,”Bell System Technical Journal, vol. 12, no. 4, pp. 377–430, 1933
1933
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.