Recognition: unknown
TopoHR: Hierarchical Centerline Representation for Cyclic Topology Reasoning in Driving Scenes with Point-to-Instance Relations
Pith reviewed 2026-05-08 04:32 UTC · model grok-4.3
The pith
Cyclic interaction between centerline detection and topology reasoning, driven by hierarchical point-to-instance features, improves road layout understanding in driving scenes.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
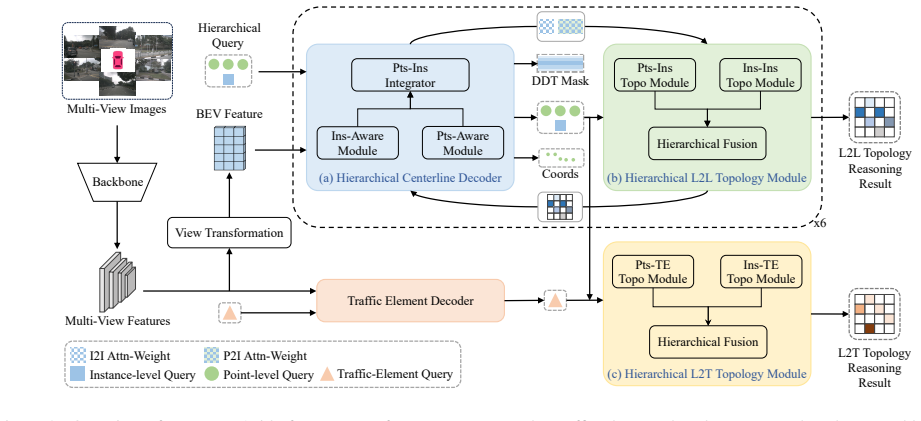
TopoHR establishes cyclic interaction between centerline detection and topology reasoning through a hierarchical representation that includes point queries, instance queries, and semantic representations integrated in a hierarchical centerline decoder. The hierarchical topology reasoning module captures both fine-grained point-to-instance relationships and global instance-to-instance connections within a unified architecture, yielding accurate and robust topology reasoning.
What carries the argument
Hierarchical centerline representation with point queries, instance queries, and semantic features fused in a decoder, paired with a topology reasoning module that unifies point-to-instance and instance-to-instance relations.
If this is right
- Centerline detection and topology reasoning iteratively improve each other instead of operating in a one-way sequence.
- Fine-grained point-to-instance relations become available to guide global topology decisions.
- The model records new state-of-the-art scores on OpenLane-V2, with gains of +3.8 DET_l and +5.4 TOP_ll on subset A.
- Larger gains of +11.0 DET_l and +7.9 TOP_ll appear on the harder subset B.
Where Pith is reading between the lines
- The same cyclic multi-level linking pattern could apply to other graph-structured vision tasks such as road network extraction from aerial imagery.
- Explicit point-level relations might reduce the need for heavy post-processing networks that current lane detectors still require.
- Measuring inference latency on embedded hardware would test whether the added hierarchy remains practical for real-time vehicle use.
Load-bearing premise
The benchmark gains arise primarily from the cyclic interaction and point-to-instance relations rather than from training details, model size, or dataset characteristics.
What would settle it
An ablation that removes the cyclic interaction loop while keeping the hierarchical features, decoder, and training procedure produces no meaningful gains on OpenLane-V2 subset A or B.
Figures




read the original abstract
Topology reasoning is crucial for autonomous driving. Current methods primarily focus on instance-level learning for centerline detection, followed by a sequential module for topology reasoning that relies on simplified MLP layers. Moreover, they often neglect the importance of \textit{point-to-instance} (P2I) relationships in topology reasoning. To address these limitations, we present TopoHR (Topological Hierarchical Representation), a novel end-to-end framework that establishes cyclic interaction between centerline detection and topology reasoning, allowing them to iteratively enhance each other. Specifically, we introduce a hierarchical centerline representation including point queries, instance queries, and semantic representations. These multi-level features are seamlessly integrated and fused within a hierarchical centerline decoder. Furthermore, we design a hierarchical topology reasoning module that captures both fine-grained P2I relationships and global instance-to-instance (I2I) connections within a unified architecture. With these novel components, TopoHR ensures accurate and robust topology reasoning. On the OpenLane-V2 benchmark, TopoHR refreshes state-of-the-art performance with significant improvements. Notably, compared with previous best results, TopoHR achieves +3.8 in $\mathrm{DET}_{\text{l}}$, +5.4 in $\mathrm{TOP}_{\text{ll}}$ on $\text{subset_A}$ and +11.0 in $\mathrm{DET}_{\text{l}}$, +7.9 in $\mathrm{TOP}_{\text{ll}}$ on $\text{subset_B}$, validating the effectiveness of the proposed components. The code will be shared publicly at https://github.com/Yifeng-Bai/TopoHR.git.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes TopoHR, an end-to-end framework for topology reasoning in driving scenes. It introduces a hierarchical centerline representation using point queries, instance queries, and semantic features fused in a hierarchical decoder, along with a hierarchical topology reasoning module that models fine-grained point-to-instance (P2I) and instance-to-instance (I2I) relations. The design enables cyclic interaction between centerline detection and topology reasoning to iteratively improve both. On the OpenLane-V2 benchmark, TopoHR reports new state-of-the-art results with gains of +3.8 DET_l and +5.4 TOP_ll on subset_A and +11.0 DET_l and +7.9 TOP_ll on subset_B relative to prior best methods.
Significance. If the performance lifts are causally attributable to the cyclic P2I/I2I interactions and hierarchical features rather than training or implementation details, the work would meaningfully advance integrated detection and topology reasoning for autonomous driving, particularly in handling complex cyclic road structures. The commitment to public code release supports reproducibility.
major comments (1)
- [Experiments] Experiments section: The ablation studies do not isolate the contribution of the cyclic interaction and P2I module. No controlled experiment is reported that removes only the iterative feedback loop (while retaining the hierarchical representation, all queries, and identical training schedule) to measure its specific impact on the reported +11.0 DET_l and +7.9 TOP_ll gains on subset_B. This attribution is load-bearing for the central claim that the cyclic P2I/I2I design drives the improvements.
minor comments (2)
- [Abstract] The abstract and introduction should explicitly define the metrics DET_l and TOP_ll (including what 'l' and 'll' denote) rather than assuming reader familiarity with OpenLane-V2.
- [Method] Figure captions and method diagrams would benefit from clearer labeling of the cyclic feedback arrows between the detection decoder and topology reasoning module to match the textual description of iterative enhancement.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We agree that stronger isolation of the cyclic interaction's contribution would better support our claims and will revise the experiments section accordingly.
read point-by-point responses
-
Referee: [Experiments] Experiments section: The ablation studies do not isolate the contribution of the cyclic interaction and P2I module. No controlled experiment is reported that removes only the iterative feedback loop (while retaining the hierarchical representation, all queries, and identical training schedule) to measure its specific impact on the reported +11.0 DET_l and +7.9 TOP_ll gains on subset_B. This attribution is load-bearing for the central claim that the cyclic P2I/I2I design drives the improvements.
Authors: We agree that a more precisely controlled ablation isolating the iterative feedback loop is desirable to strengthen attribution of the reported gains. Our current ablations compare the full TopoHR model against variants that remove the hierarchical decoder or the P2I relations while retaining the overall training schedule, showing consistent drops in both DET_l and TOP_ll. However, these do not disable only the cyclic interaction (i.e., the iterative message passing between detection and topology heads) while freezing all other components. We will add this exact controlled experiment in the revised manuscript: we will train a non-cyclic variant that performs a single forward pass without feedback, keeping the hierarchical representation, point/instance queries, semantic features, and training schedule identical. The performance difference relative to the full cyclic model will be reported on both subsets, directly quantifying the contribution of the cyclic P2I/I2I interactions to the +11.0 / +7.9 gains on subset_B. revision: yes
Circularity Check
No circularity: standard architectural proposal with empirical benchmark validation
full rationale
The paper proposes TopoHR as an end-to-end framework introducing hierarchical point/instance queries, semantic features, a hierarchical decoder, and a topology module capturing P2I and I2I relations with cyclic detection-reasoning interaction. These are presented as independent design choices whose effectiveness is validated by reported SOTA lifts on OpenLane-V2 subsets. No equations, parameters, or premises reduce by construction to fitted inputs or self-citations; the central claims rest on external benchmark comparison rather than self-referential definitions or renamed known results. The derivation chain is self-contained and falsifiable via ablation or replication.
Axiom & Free-Parameter Ledger
free parameters (1)
- neural network weights and hyperparameters
axioms (1)
- standard math Standard assumptions of supervised deep learning for computer vision tasks hold, including that gradient-based optimization finds useful representations.
Reference graph
Works this paper leans on
-
[1]
nuscenes: A multi- modal dataset for autonomous driving
Holger Caesar, Varun Bankiti, Alex H Lang, Sourabh V ora, Venice Erin Liong, Qiang Xu, Anush Krishnan, Yu Pan, Gi- ancarlo Baldan, and Oscar Beijbom. nuscenes: A multi- modal dataset for autonomous driving. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 11621–11631, 2020. 6
2020
-
[2]
Structured bird’s-eye-view traffic scene un- derstanding from onboard images
Yigit Baran Can, Alexander Liniger, Danda Pani Paudel, and Luc Van Gool. Structured bird’s-eye-view traffic scene un- derstanding from onboard images. In2021 IEEE/CVF In- ternational Conference on Computer Vision (ICCV), pages 15641–15650. IEEE Computer Society, 2021. 3
2021
-
[3]
Masked-attention mask transformer for universal image segmentation
Bowen Cheng, Ishan Misra, Alexander G Schwing, Alexan- der Kirillov, and Rohit Girdhar. Masked-attention mask transformer for universal image segmentation. InProceed- ings of the IEEE/CVF conference on computer vision and pattern recognition, pages 1290–1299, 2022. 5
2022
-
[4]
Mask2map: Vectorized hd map construction using bird’s eye view segmentation masks
Sehwan Choi, Jungho Kim, Hongjae Shin, and Jun Won Choi. Mask2map: Vectorized hd map construction using bird’s eye view segmentation masks. InEuropean Confer- ence on Computer Vision, pages 19–36. Springer, 2024. 2
2024
-
[5]
Piv- otnet: Vectorized pivot learning for end-to-end hd map con- struction
Wenjie Ding, Limeng Qiao, Xi Qiu, and Chi Zhang. Piv- otnet: Vectorized pivot learning for end-to-end hd map con- struction. In2023 IEEE/CVF International Conference on Computer Vision (ICCV), pages 3649–3659. IEEE, 2023. 3
2023
-
[6]
Topopoint: Enhance topology rea- soning via endpoint detection in autonomous driving
Yanping Fu, Xinyuan Liu, Tianyu Li, Yike Ma, Yucheng Zhang, and Feng Dai. Topopoint: Enhance topology rea- soning via endpoint detection in autonomous driving. InThe Thirty-ninth Annual Conference on Neural Information Pro- cessing Systems. 7
-
[7]
Topologic: An in- terpretable pipeline for lane topology reasoning on driving scenes.Advances in Neural Information Processing Systems, 37:61658–61676, 2024
Yanping Fu, Wenbin Liao, Xinyuan Liu, Hang Xu, Yike Ma, Yucheng Zhang, and Feng Dai. Topologic: An in- terpretable pipeline for lane topology reasoning on driving scenes.Advances in Neural Information Processing Systems, 37:61658–61676, 2024. 1, 2, 3, 4, 6, 7, 8
2024
-
[8]
3d-lanenet: End-to-end 3d multiple lane detection
Noa Garnett, Rafi Cohen, Tomer Pe’er, Roee Lahav, and Dan Levi. 3d-lanenet: End-to-end 3d multiple lane detection. In 2019 IEEE/CVF International Conference on Computer Vi- sion (ICCV), pages 2921–2930. IEEE, 2019. 1
2019
-
[9]
Deep residual learning for image recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. InProceed- ings of the IEEE conference on computer vision and pattern recognition, pages 770–778, 2016. 6
2016
-
[10]
Relation detr: Exploring explicit position relation prior for object detection
Xiuquan Hou, Meiqin Liu, Senlin Zhang, Ping Wei, Badong Chen, and Xuguang Lan. Relation detr: Exploring explicit position relation prior for object detection. InEuropean Con- ference on Computer Vision, pages 89–105. Springer, 2024. 5
2024
-
[11]
M Kalfaoglu, Halil Ibrahim Ozturk, Ozsel Kilinc, and Alptekin Temizel. Topomask: Instance-mask-based formu- lation for the road topology problem via transformer-based architecture.arXiv preprint arXiv:2306.05419, 2023. 1, 3
-
[12]
M Kalfaoglu, Halil Ibrahim Ozturk, Ozsel Kilinc, and Alptekin Temizel. Topomaskv2: Enhanced instance-mask- based formulation for the road topology problem.arXiv preprint arXiv:2409.11325, 2024. 1, 2
-
[13]
Topobda: Towards bezier de- formable attention for road topology understanding.Neuro- computing, page 132360, 2025
Muhammet Esat Kalfaoglu, Halil Ibrahim Ozturk, Ozsel Kil- inc, and Alptekin Temizel. Topobda: Towards bezier de- formable attention for road topology understanding.Neuro- computing, page 132360, 2025. 1
2025
-
[14]
Hdmapnet: An online hd map construction and evaluation framework
Qi Li, Yue Wang, Yilun Wang, and Hang Zhao. Hdmapnet: An online hd map construction and evaluation framework. In 2022 International Conference on Robotics and Automation (ICRA), pages 4628–4634. IEEE, 2022. 2
2022
-
[15]
Graph-based topology reasoning for driv- ing scenes.Transactions on Machine Learning Research
Tianyu Li, Li Chen, Huijie Wang, Yang Li, Jiazhi Yang, Xiangwei Geng, Shengyin Jiang, Yuting Wang, Hang Xu, Chunjing Xu, et al. Graph-based topology reasoning for driv- ing scenes.Transactions on Machine Learning Research. 1, 2, 3, 7
-
[16]
Lanesegnet: Map learning with lane segment perception for autonomous driving
Tianyu Li, Peijin Jia, Bangjun Wang, Li Chen, Kun Jiang, Junchi Yan, and Hongyang Li. Lanesegnet: Map learning with lane segment perception for autonomous driving. In 12th International Conference on Learning Representations, ICLR 2024, 2024. 1, 3
2024
-
[17]
Bevformer: learning bird’s-eye-view representation from lidar-camera via spatiotemporal transformers.IEEE Transactions on Pat- tern Analysis and Machine Intelligence, 2024
Zhiqi Li, Wenhai Wang, Hongyang Li, Enze Xie, Chong- hao Sima, Tong Lu, Qiao Yu, and Jifeng Dai. Bevformer: learning bird’s-eye-view representation from lidar-camera via spatiotemporal transformers.IEEE Transactions on Pat- tern Analysis and Machine Intelligence, 2024. 6
2024
-
[18]
Maptr: Structured modeling and learning for online vectorized hd map construction
Bencheng Liao, Shaoyu Chen, Xinggang Wang, Tianheng Cheng, Qian Zhang, Wenyu Liu, and Chang Huang. Maptr: Structured modeling and learning for online vectorized hd map construction. InThe Eleventh International Conference on Learning Representations. 1, 2
-
[19]
Focal loss for dense object detection.IEEE Transactions on Pattern Analysis and Machine Intelligence, 42(2):318–327, 2018
TY Lin, P Goyal, R Girshick, K He, and P Dollar. Focal loss for dense object detection.IEEE Transactions on Pattern Analysis and Machine Intelligence, 42(2):318–327, 2018. 6
2018
-
[20]
Feature pyra- mid networks for object detection
Tsung-Yi Lin, Piotr Doll ´ar, Ross Girshick, Kaiming He, Bharath Hariharan, and Serge Belongie. Feature pyra- mid networks for object detection. InProceedings of the IEEE conference on computer vision and pattern recogni- tion, pages 2117–2125, 2017. 6
2017
-
[21]
Mgmap: Mask-guided learn- ing for online vectorized hd map construction
Xiaolu Liu, Song Wang, Wentong Li, Ruizi Yang, Junbo Chen, and Jianke Zhu. Mgmap: Mask-guided learn- ing for online vectorized hd map construction. In2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 14812–14821. IEEE Computer Society, 2024. 2
2024
-
[22]
Vectormapnet: End-to-end vectorized hd map learning
Yicheng Liu, Tianyuan Yuan, Yue Wang, Yilun Wang, and Hang Zhao. Vectormapnet: End-to-end vectorized hd map learning. InInternational Conference on Machine Learning, pages 22352–22369. PMLR, 2023. 2
2023
-
[23]
Decoupled Weight Decay Regularization
Ilya Loshchilov and Frank Hutter. Decoupled weight decay regularization.arXiv preprint arXiv:1711.05101, 2017. 7
work page internal anchor Pith review arXiv 2017
-
[24]
Aug- menting lane perception and topology understanding with standard definition navigation maps
Katie Z Luo, Xinshuo Weng, Yan Wang, Shuang Wu, Jie Li, Kilian Q Weinberger, Yue Wang, and Marco Pavone. Aug- menting lane perception and topology understanding with standard definition navigation maps. In2024 IEEE Inter- national Conference on Robotics and Automation (ICRA), pages 4029–4035. IEEE, 2024. 3, 7
2024
-
[25]
Yueru Luo, Changqing Zhou, Yiming Yang, Erlong Li, Chao Zheng, Shuqi Mei, Shuguang Cui, and Zhen Li. Reltopo: En- hancing relational modeling for driving scene topology rea- soning.arXiv preprint arXiv:2506.13553, 2025. 3, 7
-
[26]
T2sg: Traffic topology scene graph for topology reasoning in autonomous driving
Changsheng Lv, Mengshi Qi, Liang Liu, and Huadong Ma. T2sg: Traffic topology scene graph for topology reasoning in autonomous driving. In2025 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), pages 17197–17206. IEEE Computer Society, 2025. 1, 2, 3, 7
2025
-
[27]
Sept: Standard-definition map enhanced scene perception and topology reasoning for au- tonomous driving.IEEE Robotics and Automation Letters,
Muleilan Pei, Jiayao Shan, Peiliang Li, Jieqi Shi, Jing Huo, Yang Gao, and Shaojie Shen. Sept: Standard-definition map enhanced scene perception and topology reasoning for au- tonomous driving.IEEE Robotics and Automation Letters,
-
[28]
Openlane-v2: A topology reasoning benchmark for unified 3d hd mapping.Advances in Neural Information Processing Systems, 36, 2024
Huijie Wang, Tianyu Li, Yang Li, Li Chen, Chonghao Sima, Zhenbo Liu, Bangjun Wang, Peijin Jia, Yuting Wang, Shengyin Jiang, et al. Openlane-v2: A topology reasoning benchmark for unified 3d hd mapping.Advances in Neural Information Processing Systems, 36, 2024. 2, 6
2024
-
[29]
Argoverse 2: Next Generation Datasets for Self-Driving Perception and Forecasting
Benjamin Wilson, William Qi, Tanmay Agarwal, John Lambert, Jagjeet Singh, Siddhesh Khandelwal, Bowen Pan, Ratnesh Kumar, Andrew Hartnett, Jhony Kaesemodel Pontes, et al. Argoverse 2: Next generation datasets for self-driving perception and forecasting.arXiv preprint arXiv:2301.00493, 2023. 6
work page internal anchor Pith review arXiv 2023
-
[30]
TopoMLP: A Simple yet Strong Pipeline for Driving Topology Reasoning,
Dongming Wu, Jiahao Chang, Fan Jia, Yingfei Liu, Tiancai Wang, and Jianbing Shen. Topomlp: An simple yet strong pipeline for driving topology reasoning.arXiv preprint arXiv:2310.06753, 2023. 1, 2, 3
-
[31]
Centerlinedet: Centerline graph detection for road lanes with vehicle-mounted sensors by transformer for hd map generation
Zhenhua Xu, Yuxuan Liu, Yuxiang Sun, Ming Liu, and Lu- jia Wang. Centerlinedet: Centerline graph detection for road lanes with vehicle-mounted sensors by transformer for hd map generation. In2023 IEEE International Conference on Robotics and Automation (ICRA), pages 3553–3559. IEEE,
-
[32]
Sen Yang, Minyue Jiang, Ziwei Fan, Xiaolu Xie, Xiao Tan, Yingying Li, Errui Ding, Liang Wang, and Jingdong Wang. Toposd: Topology-enhanced lane segment perception with sdmap prior.arXiv preprint arXiv:2411.14751, 2024. 3
-
[33]
Topo2seq: En- hanced topology reasoning via topology sequence learning
Yiming Yang, Yueru Luo, Bingkun He, Erlong Li, Zhipeng Cao, Chao Zheng, Shuqi Mei, and Zhen Li. Topo2seq: En- hanced topology reasoning via topology sequence learning. InProceedings of the AAAI Conference on Artificial Intelli- gence, pages 9318–9326, 2025. 3
2025
-
[34]
Online map vec- torization for autonomous driving: A rasterization perspec- tive.Advances in Neural Information Processing Systems, 36:31865–31877, 2023
Gongjie Zhang, Jiahao Lin, Shuang Wu, Zhipeng Luo, Yang Xue, Shijian Lu, Zuoguan Wang, et al. Online map vec- torization for autonomous driving: A rasterization perspec- tive.Advances in Neural Information Processing Systems, 36:31865–31877, 2023. 2
2023
-
[35]
TopoHR, Ins
Yi Zhou, Hui Zhang, Jiaqian Yu, Yifan Yang, Sangil Jung, Seung-In Park, and ByungIn Yoo. Himap: Hybrid repre- sentation learning for end-to-end vectorized hd map con- struction. In2024 IEEE/CVF Conference on Computer Vi- sion and Pattern Recognition (CVPR), pages 15396–15406. IEEE, 2024. 3 TopoHR: Hierarchical Centerline Representation for Cyclic Topology...
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.