Infrastructure-Guided Connectivity-Enhanced Road Crack Detection and Estimation
Pith reviewed 2026-05-08 04:34 UTC · model grok-4.3
The pith
A communication protocol from infrastructure guides vehicles to detect road cracks by focusing camera images on relevant areas.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
An infrastructure-guided communication-enhanced road crack detection pipeline is effective and implementable on passenger vehicles. It uses a customized protocol to transmit regions of interest from the infrastructure, applies dynamic cropping and frame selection for focused images, and feeds them to a crack detection model trained on a forward-facing crack dataset using state-of-the-art backbones. This pipeline is demonstrated on an experimental vehicle platform.
What carries the argument
The customized communication protocol that transmits regions of interest from infrastructure to the vehicle for targeted image processing and crack detection.
If this is right
- The system is effective and implementable on passenger vehicles.
- Focused images from dynamic cropping and frame selection improve model performance.
- The prepared forward-facing crack dataset supports better generalization in detection.
- Full pipeline demonstration on experimental platform confirms practical viability.
Where Pith is reading between the lines
- Integration with smart infrastructure networks could enable widespread real-time road condition data collection.
- The approach might extend to estimating crack severity for prioritized maintenance decisions.
- It reduces reliance on dedicated inspection vehicles by using passenger cars for monitoring.
Load-bearing premise
The customized communication protocol reliably transmits accurate regions of interest in real time and the prepared dataset enables the model to generalize across varied road and lighting conditions.
What would settle it
An experiment on the vehicle platform where communication fails to provide timely ROI data or the model fails to detect cracks in diverse conditions would disprove the pipeline's effectiveness.
Figures




read the original abstract
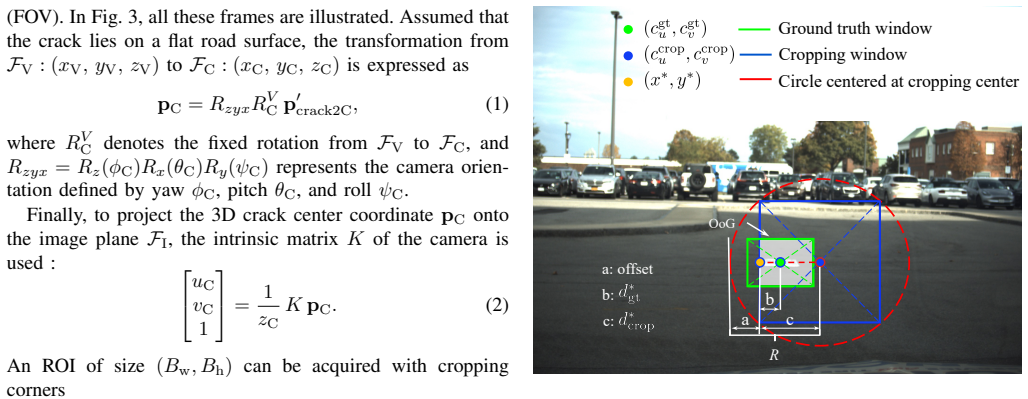
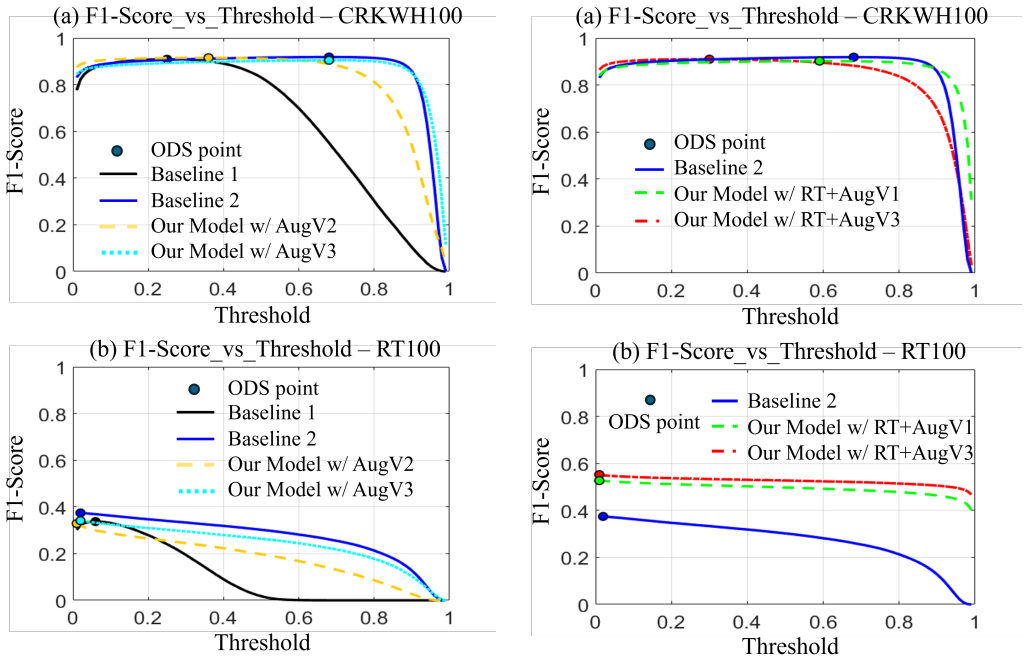
In this paper, we report the world's first infrastructure-guided communication-enhanced road crack detection pipeline that is effective and implementable on passenger vehicles. We first design a customized communication protocol to transmit the region of interest from the infrastructure to the vehicle. With proper camera image processing (e.g., dynamic cropping and frame selection), the focused images are provided to the crack detection model. Leveraging state-of-the-art crack detection model backbones and a carefully prepared dataset comprising a forward-facing view with a crack, we train the model to improve crack-detection performance. We demonstrate the full detection pipeline on an experimental vehicle platform, showcase the detection effectiveness, and project future research directions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. This paper presents what it claims is the world's first infrastructure-guided, communication-enhanced road crack detection pipeline designed for implementation on passenger vehicles. The approach involves a custom communication protocol to transmit regions of interest from infrastructure to the vehicle, followed by camera image processing techniques such as dynamic cropping and frame selection to feed focused images into a crack detection model. The model is trained using state-of-the-art backbones on a prepared forward-facing crack dataset, and the full pipeline is demonstrated on an experimental vehicle platform, with projections for future research.
Significance. The proposed integration of infrastructure guidance with vehicle-based crack detection has the potential to enhance road safety and maintenance by enabling more accurate and real-time detection in varied conditions. However, since the manuscript provides no quantitative performance metrics, baselines, or detailed validation, the significance remains prospective rather than demonstrated. If the system proves effective upon evaluation, it could influence the development of connected vehicle technologies in computer vision applications.
major comments (2)
- [Abstract] Abstract: The claim that the pipeline is 'effective' is not backed by any reported quantitative results, such as accuracy, precision, recall, F1 score, IoU, or latency. This is a load-bearing issue for the central claim as the abstract and description outline components but provide no evidence of improved performance over standard methods.
- [Abstract] Abstract: The assertion of being the 'world's first' such system lacks supporting evidence from a literature survey or comparison to existing infrastructure-assisted detection methods, making the novelty claim unsubstantiated.
minor comments (2)
- The manuscript would benefit from the inclusion of experimental results, including performance tables and qualitative detection examples.
- Provide more details on the dataset preparation, model training hyperparameters, and the specifics of the communication protocol to allow reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address the major comments point-by-point below and will revise the manuscript to incorporate quantitative metrics and a strengthened literature review.
read point-by-point responses
-
Referee: [Abstract] Abstract: The claim that the pipeline is 'effective' is not backed by any reported quantitative results, such as accuracy, precision, recall, F1 score, IoU, or latency. This is a load-bearing issue for the central claim as the abstract and description outline components but provide no evidence of improved performance over standard methods.
Authors: We agree that the abstract's use of 'effective' would be strengthened by quantitative evidence. The current manuscript emphasizes the system architecture, custom protocol, image processing pipeline, and qualitative demonstration on the experimental vehicle platform. In the revision, we will update the abstract and add explicit performance metrics (including precision, recall, F1, IoU, and end-to-end latency) from the trained models, plus direct comparisons against standard crack-detection baselines without infrastructure guidance. revision: yes
-
Referee: [Abstract] Abstract: The assertion of being the 'world's first' such system lacks supporting evidence from a literature survey or comparison to existing infrastructure-assisted detection methods, making the novelty claim unsubstantiated.
Authors: We acknowledge that the novelty claim requires better substantiation. Our positioning rests on the specific combination of infrastructure-to-vehicle ROI transmission, dynamic cropping for forward-facing crack imagery, and the end-to-end vehicle implementation. In the revised manuscript we will expand the related-work section with a targeted survey of infrastructure-assisted detection systems and explicitly differentiate our contributions (custom protocol, focused image selection, and crack-specific application) from prior work. revision: yes
Circularity Check
No circularity: descriptive system integration without derivations or self-referential predictions
full rationale
The paper describes an infrastructure-guided road crack detection pipeline involving a custom communication protocol, dynamic image cropping, a forward-facing dataset, and training of an existing crack detection backbone, followed by a vehicle platform demonstration. No equations, mathematical derivations, fitted parameters, or predictions appear in the provided abstract or description. Central claims of novelty and effectiveness rest on system integration and qualitative demonstration rather than any reduction to inputs by construction, self-citation chains, or renamed empirical patterns. The work is self-contained as an engineering report with no internal logical circularity.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
American Society of Civil Engineers. A comprehensive assessment of america’s infrastructure.A Comprehensive Assessment of America’s Infrastructure, ASCE, ASCE, pages 1–32, 2025
work page 2025
-
[2]
X. Q. Kong, Z. H. Li, Y . L. Zhang, and S. Das. Bridge deck deterioration: Reasons and patterns.Transportation Research Record, 2676(7):570– 584, 2022
work page 2022
-
[3]
Chan Yang, Peng Lou, and Hani Nassif. Correlation of bridge deck deterioration with truckload spectra based on nbi condition rating and weigh-in-motion data. Report, United States. Department of Transporta- tion. Federal Highway Administration
-
[4]
A. Ibrahim, S. Abdelkhalek, T. Zayed, A. H. Qureshi, and E. M. Abdelkader. A comprehensive review of the key deterioration factors of concrete bridge decks.Buildings, 14(11), 2024
work page 2024
-
[5]
Abdelhady Omar. Condition monitoring of reinforced concrete bridge decks: Current practices and future perspectives.Current Trends in Civil & Structural Engineering, 8(4), 2022
work page 2022
-
[6]
R. Tawadrous, G. Morcous, and M. Maguire. Performance evaluation of a new precast concrete bridge deck system.Journal of Bridge Engineering, 24(6), 2019
work page 2019
-
[7]
E. Shahrokhinasab and D. Garber. Long-term performance of full-depth precast concrete (fdpc) deck panels.Engineering Structures, 244, 2021
work page 2021
-
[8]
State-of- the-practice report— partial-depth precast concrete deck panels
Michael; McDonagh, Andrew; Foden, and Alexandra Beyer. State-of- the-practice report— partial-depth precast concrete deck panels. Report, United States. Federal Highway Administration. Office of Bridges and Structures; United States. Department of Transportation. Federal Highway Administration. Office of Infrastructure, 2022
work page 2022
-
[9]
AASHTO guide manual for bridge element inspection
American Association of State Highway and Transportation Officials. AASHTO guide manual for bridge element inspection. Guide manual for bridge element inspection. American Association of State Highway and Transportation Officials, Washington, DC, 1st edition, 2011
work page 2011
-
[10]
Report, American Association of State Highway and Transportation Officials, 2019
The evolution of drones part 3: Building highways in the sky. Report, American Association of State Highway and Transportation Officials, 2019
work page 2019
-
[11]
Drone-driven infrared bridge deck corridor scans
Alynix. Drone-driven infrared bridge deck corridor scans. https://alynix. com/decker/. Accessed: 2026-03-25
work page 2026
-
[12]
Deck Top Scanning System (DTSS)
NEXCO WEST USA. Deck Top Scanning System (DTSS). https: //www.w-nexco-usa.com/documents/technology/DTSS.pdf. Accessed: 2026-01-04
work page 2026
-
[13]
U.S. Department of Transportation. USDOT releases national deploy- ment plan for vehicle-to-everything (V2X) technologies to reduce death and serious injuries on america’s roadways. link, 2024. Press release, Aug. 16, 2024
work page 2024
-
[14]
KR Kirschke and SA Velinsky. Histogram-based approach for auto- mated pavement-crack sensing.Journal of Transportation Engineering, 118(5):700–710, 1992
work page 1992
-
[15]
Ikhlas Abdel-Qader, Osama Abudayyeh, and Michael E Kelly. Analysis of edge-detection techniques for crack identification in bridges.Journal of computing in civil engineering, 17(4):255–263, 2003
work page 2003
-
[16]
Albert Ayenu-Prah and Nii Attoh-Okine. Evaluating pavement cracks with bidimensional empirical mode decomposition.EURASIP Journal on Advances in Signal Processing, 2008(1):861701, 2008
work page 2008
-
[17]
Qin Zou, Yu Cao, Qingquan Li, Qijie Mao, and Song Wang. Cracktree: Automatic crack detection from pavement images.Pattern Recognition Letters, 33(3):227–238, 2012
work page 2012
-
[18]
Qin Zou, Zheng Zhang, Qingquan Li, Xianbiao Qi, Qian Wang, and Song Wang. Deepcrack: Learning hierarchical convolutional features for crack detection.IEEE Transactions on Image Processing, 28(3):1498– 1512, 2019
work page 2019
-
[19]
Junzhou Chen, Nan Zhao, Ronghui Zhang, Long Chen, Kai Huang, and Zhijun Qiu. Refined crack detection via lecsformer for autonomous road inspection vehicles.IEEE Transactions on Intelligent V ehicles, 8(3):2049–2061, 2022
work page 2049
-
[20]
Haitao Li, Tao Peng, Ningguo Qiao, Zhiwei Guan, Xinyun Feng, Peng Guo, Tingting Duan, and Jinfeng Gong. Cracktinynet: A novel deep learning model specifically designed for superior performance in tiny road surface crack detection.IET Intelligent Transport Systems, 18(12):2693–2712, 2024
work page 2024
-
[21]
Yifan Pan, Xianfeng Zhang, Guido Cervone, and Liping Yang. Detection of asphalt pavement potholes and cracks based on the unmanned aerial vehicle multispectral imagery.IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 11(10):3701–3712, 2018
work page 2018
-
[22]
Xinbao Chen, Chang Liu, Long Chen, Xiaodong Zhu, Yaohui Zhang, and Chenxi Wang. A pavement crack detection and evaluation frame- work for a UA V inspection system based on deep learning.Applied Sciences, 14(3):1157, 2024
work page 2024
-
[23]
Zhengfei Song, Nachuan Ma, Zhuoyan Zhang, Ming-Ju Lee, Sergey Vityazev, Alexander Dvorkovich, Rui Fan, et al. Robust and real- time road crack detection through collaborative dual-branch learning on robotic sensing platform. In2025 IEEE International Conference on Real-time Computing and Robotics (RCAR), pages 55–60. IEEE, 2025
work page 2025
-
[24]
Sike Wang, Qiao Dong, Xueqin Chen, Zepeng Chu, Ruiqi Li, Jing Hu, and Xingyu Gu. Measurement of asphalt pavement crack length using yolo v5-bifpn.Journal of Infrastructure Systems, 30(2):04024005, 2024
work page 2024
-
[25]
Crack-pot: Autonomous road crack and pothole detection
Sukhad Anand, Saksham Gupta, Vaibhav Darbari, and Shivam Kohli. Crack-pot: Autonomous road crack and pothole detection. In2018 digital image computing: techniques and applications (DICTA), pages 1–6. IEEE, 2018
work page 2018
-
[26]
Felix Kortmann, Pascal Fassmeyer, Burkhardt Funk, and Paul Drews. Watch out, pothole! featuring road damage detection in an end-to- end system for autonomous driving.Data & Knowledge Engineering, 142:102091, 2022
work page 2022
-
[27]
Nexteer Automotive. Road surface detection. https://www.nexteer.com/ software/road-surface-detection/. Accessed: 2026-01-04
work page 2026
-
[28]
Connected mercedes cars to transmit road condition data in sweden
Just Auto Magazine. Connected mercedes cars to transmit road condition data in sweden. https://justauto.nridigital.com/just auto magazine sep23/connected mercedes cars to transmit road condition data in sweden. Accessed: 2026-03-25
work page 2026
- [29]
-
[30]
Nachuan Ma, Qiang Hu, Zhengfei Song, Sicen Guo, and Rui Fan. Self-derived multi-modal knowledge distillation for real-time road crack detection.IEEE Sensors Journal, 2025
work page 2025
-
[31]
Cellular-v2x technology overview, 2019
Qualcomm Technologies Inc. Cellular-v2x technology overview, 2019
work page 2019
-
[32]
OpenCV Developers. Camera calibration. https://docs.opencv.org/4.x/ dc/dbb/tutorial py calibration.html, 2024. Accessed: 2026-01-05
work page 2024
-
[33]
Ultralytics. YOLOv8 Documentation. https://docs.ultralytics.com/ models/yolov8/, 2023
work page 2023
-
[34]
Nachuan Ma, Zhengfei Song, Qiang Hu, Chuang-Wei Liu, Yu Han, Yant- ing Zhang, Rui Fan, and Lihua Xie. Vehicular road crack detection with deep learning: A new online benchmark for comprehensive evaluation of existing algorithms.arXiv preprint arXiv:2503.18082, 2025
-
[35]
ROS 2: Robot Operating System 2
Open Robotics. ROS 2: Robot Operating System 2. https://docs.ros.org/ en/foxy/index.html, 2022. Accessed: 2026-03-22
work page 2022
-
[36]
Autoware: Open-Source Software for Au- tonomous Driving
Autoware Foundation. Autoware: Open-Source Software for Au- tonomous Driving. https://github.com/autowarefoundation/autoware,
-
[37]
Accessed: 2026-03-22
work page 2026
-
[38]
StereoLabs. ZED SDK. https://www.stereolabs.com/developers, 2026. Accessed: Jan. 4, 2026
work page 2026
-
[39]
Safe and efficient data-driven connected cruise control.IF AC-PapersOnLine, 59(30):749–754, 2025
Haosong Xiao and Chaozhe R He. Safe and efficient data-driven connected cruise control.IF AC-PapersOnLine, 59(30):749–754, 2025. 10
work page 2025
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.