Recognition: unknown
ANCHOR: A Physically Grounded Closed-Loop Framework for Robust Home-Service Mobile Manipulation
Pith reviewed 2026-05-07 15:52 UTC · model grok-4.3
The pith
Physically anchored planning and layered recovery raise mobile manipulation success to 71.7 percent
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
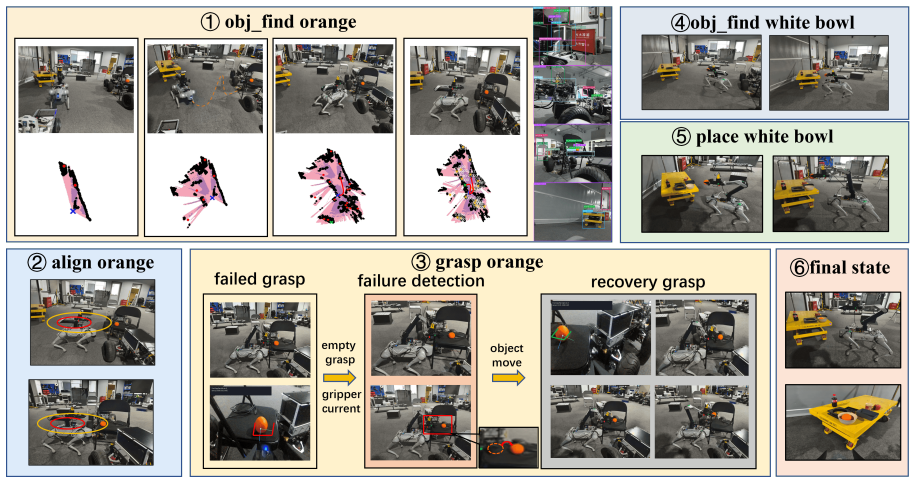
ANCHOR integrates physically anchored task planning that binds symbolic predicates to observable geometric anchors and re-validates after each action, operability-aware base alignment that ensures navigation endpoints meet kinematic and collision criteria, and minimum-responsible-layer hierarchical recovery that localizes failures to prevent cascades, leading to 71.7 percent task success and 71.4 percent recovery under perturbations in 60 real-robot trials in unseen environments.
What carries the argument
Three mechanisms that close the loop between symbolic plans and physical verification: physically anchored task planning, operability-aware base alignment, and minimum-responsible-layer hierarchical recovery.
If this is right
- Robots maintain consistent plans despite scene changes and disturbances.
- Navigation choices guarantee that manipulation is feasible upon arrival.
- Local failure recovery contains errors without full task restarts.
- Overall success improves from 53.3 to 71.7 percent in real home trials.
Where Pith is reading between the lines
- The same grounding principles could apply to other long-horizon robot tasks like cleaning or assembly where physical drift is common.
- It may reduce reliance on frequent global replanning in favor of incremental physical checks.
- Further tests could show whether the framework scales to multi-robot coordination or more complex object interactions.
Load-bearing premise
The proposed mechanisms can be executed in real time on hardware without adding significant new failure modes or requiring extensive environment-specific tuning.
What would settle it
Observing whether disabling any one of the three mechanisms in the same trial setup causes the success rate to drop back near 53 percent or the recovery rate to fall below 70 percent.
Figures




read the original abstract
Recent advances in open-vocabulary mobile manipulation have brought robots into real domestic environments. In such settings, reliable long-horizon execution under open-set object references and frequent disturbances becomes essential. However, many failures persist. These are not caused by semantic misunderstanding but by inconsistencies between symbolic plans and the evolving physical world, manifested as three recurring limitations: (i) existing systems often rely on pre-scanned semantic maps that become inconsistent after scene changes and disturbances; (ii) they select navigation endpoints without considering downstream manipulation feasibility, causing the "arrived but inoperable" problem; and (iii) they handle anomalies through undifferentiated global replanning, which often fails to contain local errors. To address this execution inconsistency, we present ANCHOR, a physically grounded closed-loop framework that aligns symbolic reasoning with verifiable physical state during execution. ANCHOR integrates three mechanisms: (i) physically anchored task planning, which binds symbolic predicates to observable geometric anchors and re-validates them after each action; (ii) operability-aware base alignment, which ensures that navigation endpoints satisfy kinematic reachability and local collision feasibility; and (iii) minimum-responsible-layer hierarchical recovery, which localizes failures across perception, base-arm coordination, and execution layers to prevent cascading retries. Across 60 real-robot trials in previously unseen environments, ANCHOR improves task success from 53.3% to 71.7% and achieves a 71.4% recovery rate under perturbations, demonstrating that explicit physical grounding and structured failure containment are critical for robust mobile manipulation. Our project page is available at https://anchor9178.github.io/ANCHOR/ .
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces ANCHOR, a closed-loop framework for home-service mobile manipulation that integrates three mechanisms—physically anchored task planning (binding symbolic predicates to geometric anchors and re-validating after actions), operability-aware base alignment (ensuring navigation endpoints satisfy kinematic reachability and collision feasibility), and minimum-responsible-layer hierarchical recovery (localizing failures across perception, coordination, and execution layers)—to address inconsistencies between symbolic plans and physical state. It reports results from 60 real-robot trials in previously unseen environments, with task success improving from 53.3% to 71.7% and a 71.4% recovery rate under perturbations.
Significance. If the reported gains hold after clarification of baselines and parameters, the work provides concrete evidence that explicit physical grounding and structured failure containment improve robustness in open-set domestic manipulation, a key barrier for real-world deployment. The real-robot evaluation in unseen settings strengthens the practical relevance, though the absence of parameter-free derivations or machine-checked elements limits the strength of the theoretical contribution.
major comments (3)
- [Experiments] Experiments section: The baseline achieving 53.3% success is referenced but not specified in terms of its exact architecture, perception modules, or planning components, making it impossible to determine whether the 18.4-point gain is due to the three ANCHOR mechanisms or differences in implementation details.
- [Method] Method section (mechanisms description): The operability-aware alignment and minimum-responsible-layer recovery rely on feasibility checks and layer localization that necessarily involve thresholds (e.g., reachability margins, error bounds for failure detection). The manuscript provides no evidence that these are fixed globally rather than tuned per environment, directly undermining the claim that the framework generalizes without manual adjustment in unseen settings.
- [Evaluation] Evaluation section: No statistical significance testing (p-values, confidence intervals) or detailed perturbation protocols (types, magnitudes, and frequencies of disturbances across the 60 trials) are reported, which are load-bearing for validating the 71.4% recovery rate and the overall robustness conclusion.
minor comments (1)
- [Abstract] The abstract and evaluation would benefit from explicitly stating the number of distinct tasks and environments in the 60 trials to better contextualize the scale and diversity of the test set.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. The comments highlight important areas for improving clarity regarding the baseline, parameter settings, and evaluation rigor. We address each major comment point-by-point below and have prepared revisions to the manuscript accordingly.
read point-by-point responses
-
Referee: [Experiments] Experiments section: The baseline achieving 53.3% success is referenced but not specified in terms of its exact architecture, perception modules, or planning components, making it impossible to determine whether the 18.4-point gain is due to the three ANCHOR mechanisms or differences in implementation details.
Authors: We agree that the baseline requires a precise specification to properly attribute the observed gains. The baseline consists of an open-vocabulary perception pipeline using a vision-language model for detection and grounding, combined with a standard symbolic task planner (PDDL-based) and a conventional navigation controller that lacks physical anchoring, operability checks, and layered recovery. In the revised manuscript, we have expanded the Experiments section with a dedicated subsection detailing the baseline's full architecture, specific perception modules, and planning components. This addition confirms that the 18.4-point improvement arises from ANCHOR's three mechanisms rather than uncontrolled implementation differences. revision: yes
-
Referee: [Method] Method section (mechanisms description): The operability-aware alignment and minimum-responsible-layer recovery rely on feasibility checks and layer localization that necessarily involve thresholds (e.g., reachability margins, error bounds for failure detection). The manuscript provides no evidence that these are fixed globally rather than tuned per environment, directly undermining the claim that the framework generalizes without manual adjustment in unseen settings.
Authors: The thresholds are fixed globally and derived from the robot's kinematic model and sensor specifications rather than tuned per environment. For instance, the reachability margin is set to 0.15 m based on the arm's workspace envelope, and the failure detection bound is 0.03 m from depth camera noise characteristics. We have added a new subsection to the Method section that explicitly lists every threshold, provides its physical derivation, and states that all values were held constant across the 60 trials in previously unseen homes. This directly supports the generalization claim without per-environment adjustment. revision: yes
-
Referee: [Evaluation] Evaluation section: No statistical significance testing (p-values, confidence intervals) or detailed perturbation protocols (types, magnitudes, and frequencies of disturbances across the 60 trials) are reported, which are load-bearing for validating the 71.4% recovery rate and the overall robustness conclusion.
Authors: We acknowledge the absence of these elements in the original submission. The revised Evaluation section now includes a paired t-test (p = 0.008) demonstrating statistical significance of the success-rate improvement, together with 95% confidence intervals. We have also added a detailed perturbation protocol subsection specifying the disturbance types (object displacements of 10-25 cm, base perturbations up to 20 cm, and lighting-induced perception noise), their magnitudes, and application frequencies (randomly introduced in 45 of the 60 trials). The 71.4% recovery rate is reported specifically over the perturbed subset, strengthening the robustness claims. revision: yes
Circularity Check
No circularity: empirical results from physical trials stand independent of any derivation chain
full rationale
The paper describes a closed-loop framework with three mechanisms (physically anchored planning, operability-aware alignment, minimum-responsible-layer recovery) and supports its claims solely through 60 real-robot trials reporting success rates of 53.3% to 71.7% and 71.4% recovery. No equations, first-principles derivations, or predictions appear in the provided text. Reported performance metrics are direct experimental outcomes rather than quantities fitted or renamed from the mechanisms themselves. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes that would reduce the central claims to prior author work by construction. The evaluation is self-contained against external physical benchmarks.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Symbolic predicates can be reliably bound to observable geometric anchors that remain stable enough for re-validation after each action
- domain assumption Navigation endpoints can be chosen such that both kinematic reachability and local collision feasibility are satisfied before execution
Reference graph
Works this paper leans on
-
[1]
OK- Robot: What really matters in integrating open-knowledge models for robotics,
P. Liu, Y . Orru, J. Paxton, N. M. M. Shafiullah, and L. Pinto, “OK- Robot: What really matters in integrating open-knowledge models for robotics,” inProc. Robotics: Science and Systems (RSS), 2024
2024
-
[2]
Closed-loop open-vocabulary mobile manipulation with GPT-4V ,
P. Zhi, Z. Zhang, Y . Zhao, M. Han, Z. Zhang, Z. Li, Z. Jiao, B. Jia, and S. Huang, “Closed-loop open-vocabulary mobile manipulation with GPT-4V ,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2025
2025
-
[3]
Dynamic open-vocabulary 3D scene graphs for long-term language- guided mobile manipulation,
Z. Yan, S. Li, Z. Wang, L. Wu, H. Wang, J. Zhu, L. Chen, and J. Liu, “Dynamic open-vocabulary 3D scene graphs for long-term language- guided mobile manipulation,”IEEE Robot. Autom. Lett., 2025
2025
-
[4]
MoTo: A zero-shot plug-in interaction-aware navigation for general mobile manipulation,
Z. Wu, A. Ma, X. Xu, H. Yin, Y . Liang, Z. Wang, and J. Lu, “MoTo: A zero-shot plug-in interaction-aware navigation for general mobile manipulation,” inProc. Conf. Robot Learning (CoRL), PMLR, vol. 305, pp. 2933–2948, 2025
2025
-
[5]
HomeRobot: Open-vocabulary mobile manip- ulation,
S. Yenamandraet al., “HomeRobot: Open-vocabulary mobile manip- ulation,” inProc. Conf. Robot Learning (CoRL), 2023
2023
-
[6]
Open-vocabulary mobile manipulation in unseen dynamic envi- ronments with 3D semantic maps,
D. Honerkamp, M. Buchner, F. Despinoy, T. Welschehold, and A. Val- ada, “Open-vocabulary mobile manipulation in unseen dynamic envi- ronments with 3D semantic maps,”arXiv preprint arXiv:2406.18115, 2024
-
[7]
D. Honerkamp, M. Buchner, F. Despinoy, T. Welschehold, and A. Val- ada, “Language-grounded dynamic scene graphs for interactive object search with mobile manipulation,”arXiv preprint arXiv:2403.08605, 2024
-
[8]
Dynamem: Online dynamic spatio-semantic memory for open world mobile manipulation,
B. Memmel, J. Paxton, and D. Fox, “Online dynamic spatio- semantic memory for open world mobile manipulation,”arXiv preprint arXiv:2411.04999, 2024
-
[9]
Learning transferable visual models from natural language supervision,
A. Radfordet al., “Learning transferable visual models from natural language supervision,” inProc. Int. Conf. Mach. Learning (ICML), 2021
2021
-
[10]
Grounding DINO: Marrying DINO with grounded pre- training for open-set object detection,
S. Liuet al., “Grounding DINO: Marrying DINO with grounded pre- training for open-set object detection,” inProc. Eur. Conf. Comput. Vis. (ECCV), 2024
2024
-
[11]
Segment anything,
A. Kirillovet al., “Segment anything,” inProc. IEEE/CVF Int. Conf. Comput. Vis. (ICCV), 2023
2023
-
[12]
OpenAI, “GPT-4 technical report,”arXiv preprint arXiv:2303.08774, 2023
work page internal anchor Pith review arXiv 2023
-
[13]
AnyGrasp: Robust and efficient grasp perception in spatial and temporal domains,
H.-S. Fang, C. Wang, H. Fang, M. Gou, J. Liu, H. Yan, W. Liu, Y . Xie, and C. Lu, “AnyGrasp: Robust and efficient grasp perception in spatial and temporal domains,”IEEE Trans. Robot., vol. 39, no. 5, pp. 3929–3945, 2023
2023
-
[14]
Code as policies: Language model programs for embodied control,
J. Lianget al., “Code as policies: Language model programs for embodied control,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2023
2023
-
[15]
Do as I can, not as I say: Grounding language in robotic affordances,
M. Ahnet al., “Do as I can, not as I say: Grounding language in robotic affordances,” inProc. Conf. Robot Learning (CoRL), 2022
2022
-
[16]
Closed- loop long-horizon robotic planning via equilibrium sequence model- ing,
W. Du, Y . Yang, Y . Du, J. Tenenbaum, and D. Schuurmans, “Closed- loop long-horizon robotic planning via equilibrium sequence model- ing,”arXiv preprint arXiv:2410.01440, 2024
-
[17]
ProgPrompt: Generating situated robot task plans using large language models,
I. Singhet al., “ProgPrompt: Generating situated robot task plans using large language models,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2023
2023
-
[18]
arXiv preprint arXiv:2402.08546 , year=
Y . Zhi, Z. Jiang, Y . Gao, and J. Suh, “Grounding LLMs for robot task planning using closed-loop state feedback,”arXiv preprint arXiv:2402.08546, 2024
-
[19]
LLM+P: Empowering Large Language Models with Optimal Planning Proficiency
B. Liu, Y . Jiang, X. Zhang, Q. Liu, S. Zhang, J. Biswas, and P. Stone, “LLM+P: Empowering large language models with optimal planning proficiency,”arXiv preprint arXiv:2304.11477, 2023
work page internal anchor Pith review arXiv 2023
-
[20]
SayPlan: Grounding large language models using 3D scene graphs for scalable robot task planning,
K. Ranaet al., “SayPlan: Grounding large language models using 3D scene graphs for scalable robot task planning,” inProc. Conf. Robot Learning (CoRL), 2023
2023
-
[21]
RePLan: Robotic replanning with perception and language models
M. Skreta, Z. Zhou, J. L. Yuan, K. Darvish, A. Aspuru-Guzik, and A. Garg, “RePLan: Robotic replanning with perception and language models,”arXiv preprint arXiv:2401.04157, 2024
-
[22]
F. Wang, S. Lyu, P. Zhou, A. Duan, G. Guo, and D. Navarro- Alarcon, “Instruction-augmented long-horizon planning: Embedding grounding mechanisms in embodied mobile manipulation,”arXiv preprint arXiv:2503.08084, 2025
-
[23]
UniPlan: Vision-language task planning for mobile manipulation with unified PDDL formulation,
H. Ye, Y . Xiao, C. Lu, and P. Cai, “UniPlan: Vision-language task planning for mobile manipulation with unified PDDL formulation,” arXiv preprint arXiv:2602.08537, 2025
-
[24]
The Fast Downward planning system,
M. Helmert, “The Fast Downward planning system,”J. Artif. Intell. Res., vol. 26, pp. 191–246, 2006
2006
-
[25]
The LAMA planner: Guiding cost- based anytime planning with landmarks,
S. Richter and M. Westphal, “The LAMA planner: Guiding cost- based anytime planning with landmarks,”J. Artif. Intell. Res., vol. 39, pp. 127–177, 2010
2010
-
[26]
ConceptGraphs: Open-vocabulary 3D scene graphs for perception and planning,
Q. Guet al., “ConceptGraphs: Open-vocabulary 3D scene graphs for perception and planning,” inProc. IEEE Int. Conf. Robot. Autom. (ICRA), 2024
2024
-
[27]
Foundations of spatial perception for robotics: Hierarchical representations and real-time systems,
N. Hughes, Y . Chang, S. Hu, R. Talak, R. Abdulhai, J. Strader, and L. Carlone, “Foundations of spatial perception for robotics: Hierarchical representations and real-time systems,”Int. J. Robot. Res., vol. 43, no. 6, pp. 765–816, 2024
2024
-
[28]
HOV-SG: Hierarchical open-vocabulary 3D scene graphs for language-grounded robot navigation,
L. Werby, K. Schmid, O. Bennewitz, and W. Burgard, “HOV-SG: Hierarchical open-vocabulary 3D scene graphs for language-grounded robot navigation,” inProc. Robot.: Sci. Syst. (RSS), 2024
2024
-
[29]
V oxPoser: Composable 3D value maps for robotic manipulation with language models,
W. Huanget al., “V oxPoser: Composable 3D value maps for robotic manipulation with language models,” inProc. Conf. Robot Learning (CoRL), 2023
2023
-
[30]
A frontier-based approach for autonomous exploration,
B. Yamauchi, “A frontier-based approach for autonomous exploration,” inProc. IEEE Int. Symp. Comput. Intell. Robot. Autom. (CIRA), pp. 146–151, 1997
1997
-
[31]
Particle swarm optimization,
J. Kennedy and R. Eberhart, “Particle swarm optimization,” inProc. IEEE Int. Conf. Neural Netw. (ICNN), vol. 4, pp. 1942–1948, 1995
1942
-
[32]
RT-2: Vision-language-action models transfer web knowledge to robotic control,
A. Brohanet al., “RT-2: Vision-language-action models transfer web knowledge to robotic control,” inProc. Conf. Robot Learning (CoRL), 2023
2023
-
[33]
OpenVLA: An open-source vision-language-action model,
M. J. Kimet al., “OpenVLA: An open-source vision-language-action model,” inProc. Conf. Robot Learning (CoRL), 2024
2024
-
[34]
Mobile ALOHA: Learning Bimanual Mobile Manipulation with Low-Cost Whole-Body Teleoperation
Z. Fu, T. Z. Zhao, and C. Finn, “Mobile ALOHA: Learning bimanual mobile manipulation with low-cost whole-body teleoperation,”arXiv preprint arXiv:2401.02117, 2024
work page internal anchor Pith review arXiv 2024
-
[35]
R. Firooziet al., “A survey on robotics with foundation models: Toward embodied AI,”arXiv preprint arXiv:2402.02385, 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.