Recognition: unknown
Observation-Guided Neural Surrogate Learning for Scientific Simulation Emulation: A Single-Gauge Flood-Inundation Proof of Concept
Pith reviewed 2026-05-07 13:49 UTC · model grok-4.3
The pith
A neural corrector trained at one gauge pixel reproduces full hydrodynamic flood maps with high fidelity on held-out events.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
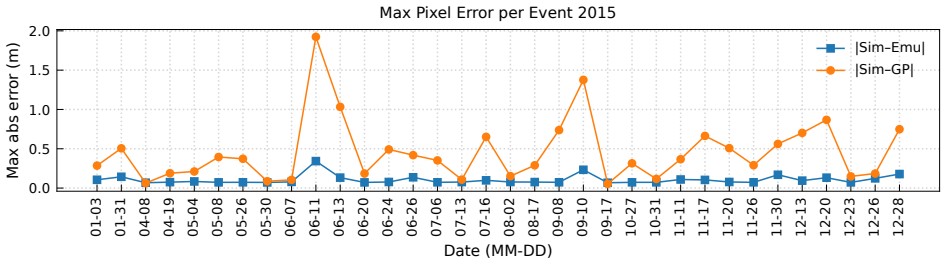
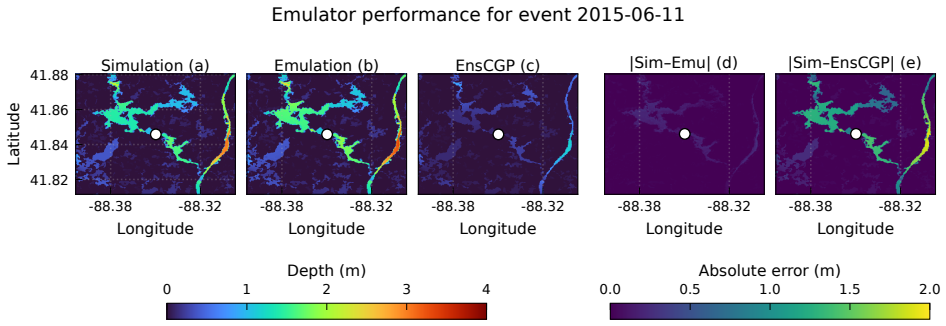
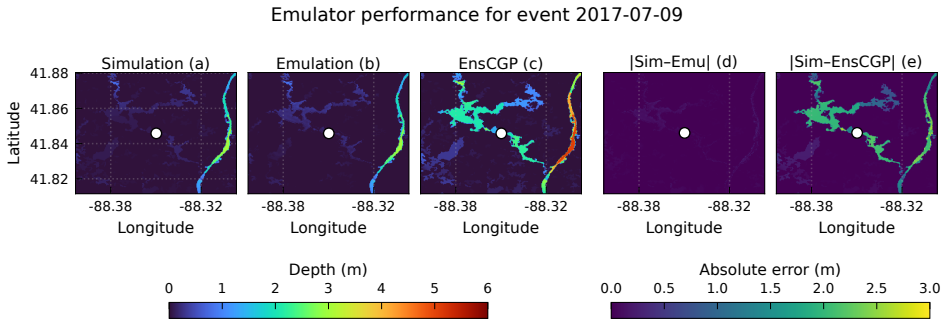
The central claim is that an observation-guided neural surrogate, built from an EnsCGP coarse estimator followed by a U-Net-ASPP corrector, reproduces LISFLOOD-FP simulation targets with R-squared approximately 0.99 and mean absolute error below 0.01 m outside the gauge-constrained pixel across 2013-2019 temporally held-out events, while maintaining strong pointwise consistency with the converted Gauge L local depth target under the rolling-year protocol. The framework therefore demonstrates strong simulator-emulation agreement under single-site observation-guided correction.
What carries the argument
The EnsCGP ensemble-approximated Gaussian-process/local analogue surrogate that supplies a coarse depth field and uncertainty proxy, combined with the U-Net-ASPP neural corrector that refines the field using hybrid losses evaluated away from the single gauge pixel.
If this is right
- Full inundation maps can be generated that remain consistent with both the underlying hydrodynamic simulator and the local gauge observation.
- Sparse real observations can be incorporated into simulation emulators without needing dense sensor networks.
- The approach generalizes temporally, as shown by performance on events held out by year under the rolling protocol.
- The gauge constraint remains localized to one pixel while simulation fidelity is preserved elsewhere.
Where Pith is reading between the lines
- The method could lower the cost of repeated flood simulations by replacing them with fast neural forward passes after initial training.
- Extending the same single-site supervision idea to multiple gauges might improve spatial coverage in complex urban terrain.
- Live gauge feeds could be fed directly into the corrector for near-real-time mapping, provided the mapping step remains unbiased.
- The framework still emulates the simulator rather than predicting real-world inundation independently, so any simulator biases would carry through.
Load-bearing premise
The single gauge stage record can be mapped and datum-converted to a local water-depth target on the simulation grid without introducing systematic bias that the neural corrector then learns to exploit only at that pixel.
What would settle it
Running the emulator on a new held-out flood event and comparing its predicted depths at several independent locations away from the gauge against both a fresh full LISFLOOD-FP simulation and any available additional in-situ measurements; large systematic deviations at those locations would falsify the claim of faithful emulation.
Figures







read the original abstract
We present an observation-guided neural surrogate-learning framework for scientific simulation emulation, demonstrated on urban flood-inundation mapping. The framework combines LISFLOOD-FP hydrodynamic simulations with a real Gauge L stage record that is mapped to the simulation grid and converted to a datum-consistent local water-depth target before being used as single-site supervision. Focusing on a 256 x 256 crop around Gauge L in the Chicago metropolitan area, the method first constructs an ensemble-approximated Gaussian-process/local analogue surrogate (EnsCGP) to obtain a coarse flood-depth estimate and an uncertainty proxy. A U-Net-ASPP neural corrector then refines the coarse map using only simulation-derived and geospatial inputs: EnsCGP depth, the uncertainty proxy, rainfall, and spatial coordinates. The converted gauge-derived local depth is used only as a pointwise training target at the mapped gauge pixel; simulation-based losses are evaluated away from that pixel. Across temporally held-out events from 2013-2019, the emulator closely reproduces LISFLOOD-FP simulation targets outside the gauge-constrained pixel, with R^2 approximately 0.99 and mean absolute error below 0.01 m, and shows strong pointwise consistency with the converted Gauge L local depth target under the stated rolling-year protocol. We interpret these results as strong simulator-emulation agreement with pointwise observation-guided correction, not as independent validation of real-world inundation accuracy or as a complete operational flood-forecasting system.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper presents an observation-guided neural surrogate-learning framework for emulating LISFLOOD-FP hydrodynamic flood-inundation simulations. It first builds an ensemble-approximated Gaussian-process surrogate (EnsCGP) to produce coarse depth estimates and an uncertainty proxy, then applies a U-Net-ASPP neural corrector that refines the map using EnsCGP output, uncertainty, rainfall, and spatial coordinates. The only observation-based supervision is a single-point target at the mapped Gauge L pixel obtained by converting the stage record to local water depth; simulation-derived losses are used everywhere else. On temporally held-out events from 2013-2019 the emulator is reported to reproduce LISFLOOD-FP targets outside the gauge pixel with R² ≈ 0.99 and MAE < 0.01 m while remaining consistent with the gauge target.
Significance. If the quantitative results hold, the work supplies a concrete proof-of-concept for training neural emulators of physics-based simulators under sparse, single-site observational guidance. The explicit scoping to simulator-emulation agreement (rather than real-world inundation accuracy) and the use of temporal hold-out validation are appropriately cautious and strengthen the contribution. The approach could inform future data-assimilation strategies in hydrology, provided the gauge-mapping procedure is fully documented.
major comments (2)
- [Abstract] Abstract: the central quantitative claim (R² ≈ 0.99 and MAE < 0.01 m on held-out events) is presented without error bars, standard deviations across events, or the exact number of events, making it difficult to judge the robustness of the emulation-agreement result.
- [Framework description] Framework description: the gauge-to-grid mapping and datum-conversion procedure that produces the single-site local-depth target is not described in sufficient detail. Because this point supplies the only observation-derived supervision and the paper itself flags the risk that the corrector could exploit pixel-specific bias, the omission is load-bearing for evaluating the weakest assumption.
minor comments (2)
- The abstract introduces the EnsCGP acronym after a long descriptive phrase; a parenthetical expansion on first use would improve immediate readability.
- Consider adding a small table or supplementary figure that reports the per-event metrics (with standard deviations) rather than aggregate statements only; this would make the held-out performance easier to assess at a glance.
Simulated Author's Rebuttal
We are grateful to the referee for their thoughtful review and recommendation for minor revision. We have carefully considered the major comments and provide point-by-point responses below. We will make the suggested revisions to improve the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central quantitative claim (R² ≈ 0.99 and MAE < 0.01 m on held-out events) is presented without error bars, standard deviations across events, or the exact number of events, making it difficult to judge the robustness of the emulation-agreement result.
Authors: We agree that including these statistics would strengthen the presentation of the results. In the revised manuscript, we will report the exact number of temporally held-out events from 2013-2019, along with the mean and standard deviation of the R² and MAE metrics across those events. If feasible, we will also include error bars or confidence intervals in the abstract or main text to better convey robustness. revision: yes
-
Referee: [Framework description] Framework description: the gauge-to-grid mapping and datum-conversion procedure that produces the single-site local-depth target is not described in sufficient detail. Because this point supplies the only observation-derived supervision and the paper itself flags the risk that the corrector could exploit pixel-specific bias, the omission is load-bearing for evaluating the weakest assumption.
Authors: We appreciate the referee highlighting this important detail. While the manuscript describes the mapping of the Gauge L stage record to the simulation grid and its conversion to a datum-consistent local water-depth target, we acknowledge that the procedure could benefit from greater elaboration to allow full evaluation of the supervision strategy. In the revision, we will expand this description, including specifics on the datum conversion, grid alignment, and any assumptions made, and we will explicitly discuss how this addresses or mitigates the risk of pixel-specific bias exploitation by the corrector. revision: yes
Circularity Check
No significant circularity detected
full rationale
The paper trains a U-Net corrector on LISFLOOD-FP simulation outputs (with losses evaluated away from the single gauge pixel) and reports generalization metrics on temporally held-out events. This is a standard supervised learning setup for emulator training; the reported R² ≈ 0.99 and MAE < 0.01 m on held-out data reflect successful fitting and generalization rather than any definitional or self-referential reduction. The gauge datum supplies only a pointwise constraint at one location and is not used to define the simulator targets themselves. No self-citation chains, ansatz smuggling, or uniqueness theorems are invoked to force the central result. The abstract explicitly scopes the claim to simulator-emulation agreement, avoiding any claim of independent real-world validation.
Axiom & Free-Parameter Ledger
free parameters (2)
- U-Net-ASPP weights and hyperparameters
- EnsCGP ensemble size and kernel hyperparameters
axioms (2)
- domain assumption The gauge stage record can be mapped to the simulation grid and converted to a datum-consistent local water-depth value without introducing unquantified bias.
- domain assumption Simulation-based losses evaluated away from the gauge pixel are sufficient to enforce physical consistency in the neural corrector.
Reference graph
Works this paper leans on
-
[1]
Oliver E. J. Wing, Paul D. Bates, Christopher C. Sampson, Adam M. Smith, K. Ariel Johnson, and Timothy A. Erickson. Validation of a 30 m resolution flood hazard model of the conterminous United States.Water Resources Research, 53(9):7968–7986, 2017.https://doi.org/10.1002/2017WR020917
-
[2]
Luigi Alfieri, Berny Bisselink, Francesco Dottori, Gustavo Naumann, Ad de Roo, Peter Salamon, Klaus Wyser, and Luc Feyen. Global projections of river flood risk in a warmer world.Earth’s Future, 5(2):171–182, 2017.https://doi.org/10.1002/2016EF000485
-
[3]
Jingming Hou, Nie Zhou, Guangzhao Chen, Miansong Huang, and Guangbi Bai. Rapid forecasting of urban flood inundation using multiple machine learning models.Natural Hazards, 108(2):2335–2356, 2021.https://doi.org/10.1007/s11069-021-04782-x
-
[4]
Faria T. Zahura and Jonathan L. Goodall. Predicting combined tidal and pluvial flood inundation using a machine learning surrogate model.Journal of Hydrology: Regional Studies, 41:101087, 2022. https://doi.org/10.1016/j.ejrh.2022.101087. 15
-
[5]
Xingyu Yan, Kui Xu, Wenqiang Feng, and Jing Chen. A rapid prediction model of urban flood in- undation in a high-risk area coupling machine learning and numerical simulation approaches.In- ternational Journal of Disaster Risk Science, 12(6):903–918, 2021.https://doi.org/10.1007/ s13753-021-00384-0
2021
-
[6]
Paul D. Bates, Matthew S. Horritt, and Timothy J. Fewtrell. A simple inertial formulation of the shallow water equations for efficient two-dimensional flood inundation modelling.Journal of Hydrology, 387(1–2):33–45, 2010.https://doi.org/10.1016/j.jhydrol.2010.03.027
-
[7]
Sharifian, Georges Kesserwani, Alovya A
Mohammad K. Sharifian, Georges Kesserwani, Alovya A. Chowdhury, Jeffrey Neal, and Paul Bates. LISFLOOD-FP 8.1: New GPU-accelerated solvers for faster fluvial/pluvial flood simulations.Geosci- entific Model Development, 16:2391–2413, 2023.https://doi.org/10.5194/gmd-16-2391-2023
-
[8]
Surrogate modeling of joint flood risk across coastal watersheds
Benjamin Bass and Philip Bedient. Surrogate modeling of joint flood risk across coastal watersheds. Journal of Hydrology, 558:159–173, 2018.https://doi.org/10.1016/j.jhydrol.2018.01.014
-
[9]
Bo Liu, Yingbing Li, Minyuan Ma, and Bojun Mao. A comprehensive review of machine learning approaches for flood depth estimation.International Journal of Disaster Risk Science, 16(3):433–445, 2025.https://doi.org/10.1007/s13753-025-00639-0
-
[10]
Wang, Wenyan Wu, and Rory Nathan
Niels Fraehr, Quan J. Wang, Wenyan Wu, and Rory Nathan. Assessment of surrogate models for flood inundation: The physics-guided LSG model vs. state-of-the-art machine learning models.Water Research, 252:121202, 2024.https://doi.org/10.1016/j.watres.2024.121202
-
[11]
Wang, Wenyan Wu, and Rory Nathan
Niels Fraehr, Quan J. Wang, Wenyan Wu, and Rory Nathan. Upskilling low-fidelity hydrodynamic models of flood inundation through spatial analysis and Gaussian Process learning.Water Resources Research, 58(8):e2022WR032248, 2022.https://doi.org/10.1029/2022WR032248
-
[12]
Maziar Raissi, Paris Perdikaris, and George E. Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, 2019.https://doi.org/10.1016/j.jcp. 2018.10.045
-
[13]
James Donnelly, Alireza Daneshkhah, and Soroush Abolfathi. Physics-informed neural networks as surrogate models of hydrodynamic simulators.Science of the Total Environment, 912:168814, 2024. https://doi.org/10.1016/j.scitotenv.2023.168814
-
[14]
Bamber, Chaojun Ouyang, and Xiao Xiang Zhu
Qingsong Xu, Yilei Shi, Jonathan L. Bamber, Chaojun Ouyang, and Xiao Xiang Zhu. Large-scale flood modeling and forecasting with FloodCast.Water Research, 264:122162, 2024.https://doi.org/10. 1016/j.watres.2024.122162
-
[15]
Learning surrogate rainfall-driven inundation models with few data, 2024
Marzieh Alireza Mirhoseini. Learning surrogate rainfall-driven inundation models with few data, 2024. arXiv:2411.19323;https://doi.org/10.48550/arXiv.2411.19323
-
[16]
Learning surrogate extreme rainfall-driven inundation models with few data
Marzieh Alireza Mirhoseini, Anamitra Saha, and Sai Ravela. Learning surrogate extreme rainfall-driven inundation models with few data. InAGU Fall Meeting Abstracts, pages H21E–04, 2024. AGU24, Washington, DC;https://ui.adsabs.harvard.edu/abs/2024AGUFMH21E...04A/abstract
2024
-
[17]
U-Net: Convolutional Networks for Biomedical Image Segmentation, pp.\ 234–241
Olaf Ronneberger, Philipp Fischer, and Thomas Brox. U-Net: Convolutional networks for biomedical image segmentation. InMedical Image Computing and Computer-Assisted Intervention – MICCAI 2015, pages 234–241, 2015.https://doi.org/10.1007/978-3-319-24574-4_28
-
[18]
Encoder- decoder with atrous separable convolution for semantic image segmentation
Liang-Chieh Chen, Yukun Zhu, George Papandreou, Florian Schroff, and Hartwig Adam. Encoder- decoder with atrous separable convolution for semantic image segmentation. InProceedings of the European Conference on Computer Vision, pages 801–818, 2018.https://doi.org/10.1007/ 978-3-030-01234-2_49. 16
2018
-
[19]
Farr, Paul A
Tom G. Farr, Paul A. Rosen, Edward Caro, Robert Crippen, Riley Duren, Scott Hensley, Michael Kobrick, Mimi Paller, Ernesto Rodriguez, Ladislav Roth, David Seal, Scott Shaffer, Joanne Shimada, Jeffrey Umland, Marian Werner, Michael Oskin, Douglas Burbank, and Douglas Alsdorf. The shuttle radar topography mission.Reviews of Geophysics, 45:RG2004, 2007.https...
2007
-
[20]
Conterminous United States land cover change patterns 2001–2016 from the 2016 National Land Cover Database
Collin Homer, Jon Dewitz, Suming Jin, George Xian, Catherine Costello, Patrick Danielson, Leila Gass, Michelle Funk, James Wickham, Stephen Stehman, Roger Auch, and Kurt Riitters. Conterminous United States land cover change patterns 2001–2016 from the 2016 National Land Cover Database. ISPRS Journal of Photogrammetry and Remote Sensing, 162:184–199, 2020...
2001
-
[21]
M. M. Thornton, R. Shrestha, Y. Wei, P. E. Thornton, S.-C. Kao, and B. E. Wilson. Daymet: Daily surface weather data on a 1-km grid for North America, version 4 r1, 2022.https://doi.org/10. 3334/ORNLDAAC/2129
2022
-
[22]
U.S. Geological Survey. USGS Water Data for the Nation: U.S. Geological Survey National Water Information System database, 2026. Accessed 2026-04-26;https://doi.org/10.5066/F7P55KJN
-
[23]
Hydrofunctions 0.2.4 documentation: Python tools for downloading and working with USGS NWIS hydrology data, 2023.https://hydrofunctions.readthedocs.io/
Michael Roberge. Hydrofunctions 0.2.4 documentation: Python tools for downloading and working with USGS NWIS hydrology data, 2023.https://hydrofunctions.readthedocs.io/
2023
-
[24]
Fast ensemble smoothing.Ocean Dynamics, 57(2):123–134, 2007
Sai Ravela and Dennis McLaughlin. Fast ensemble smoothing.Ocean Dynamics, 57(2):123–134, 2007. https://doi.org/10.1007/s10236-006-0098-6
-
[25]
Sai Ravela, John Marshall, Chris Hill, Andrew Wong, and Scott Stransky. A realtime observatory for laboratory simulation of planetary flows.Experiments in Fluids, 48(5):915–925, 2010.https: //doi.org/10.1007/s00348-009-0752-0
-
[26]
An intriguing failing of convolutional neural networks and the CoordConv solution
Rosanne Liu, Joel Lehman, Piero Molino, Felipe Petroski Such, Eric Frank, Alex Sergeev, and Jason Yosinski. An intriguing failing of convolutional neural networks and the CoordConv solution. InAd- vances in Neural Information Processing Systems, volume 31, 2018.https://proceedings.neurips. cc/paper/2018/hash/60106888f8977b71e1f15db7bc9a88d1-Abstract.html
-
[27]
Fang Yang, Wu Ding, Jianshi Zhao, Lixiang Song, Dawen Yang, and Xudong Li. Rapid urban flood inun- dation forecasting using a physics-informed deep learning approach.Journal of Hydrology, 643:131998, 2024.https://doi.org/10.1016/j.jhydrol.2024.131998
-
[28]
Hamed Farahmand, Yuanchang Xu, and Ali Mostafavi. A spatial–temporal graph deep learning model for urban flood nowcasting leveraging heterogeneous community features.Scientific Reports, 13:6768, 2023.https://doi.org/10.1038/s41598-023-32548-x. 17
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.