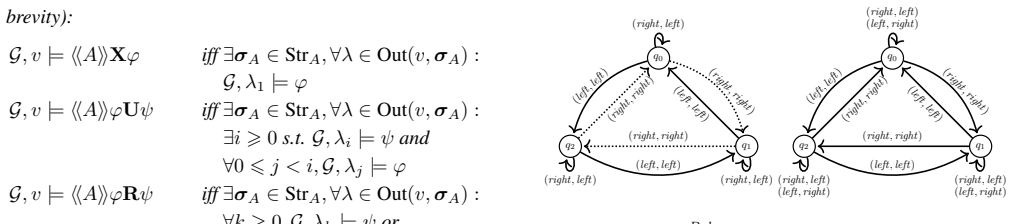
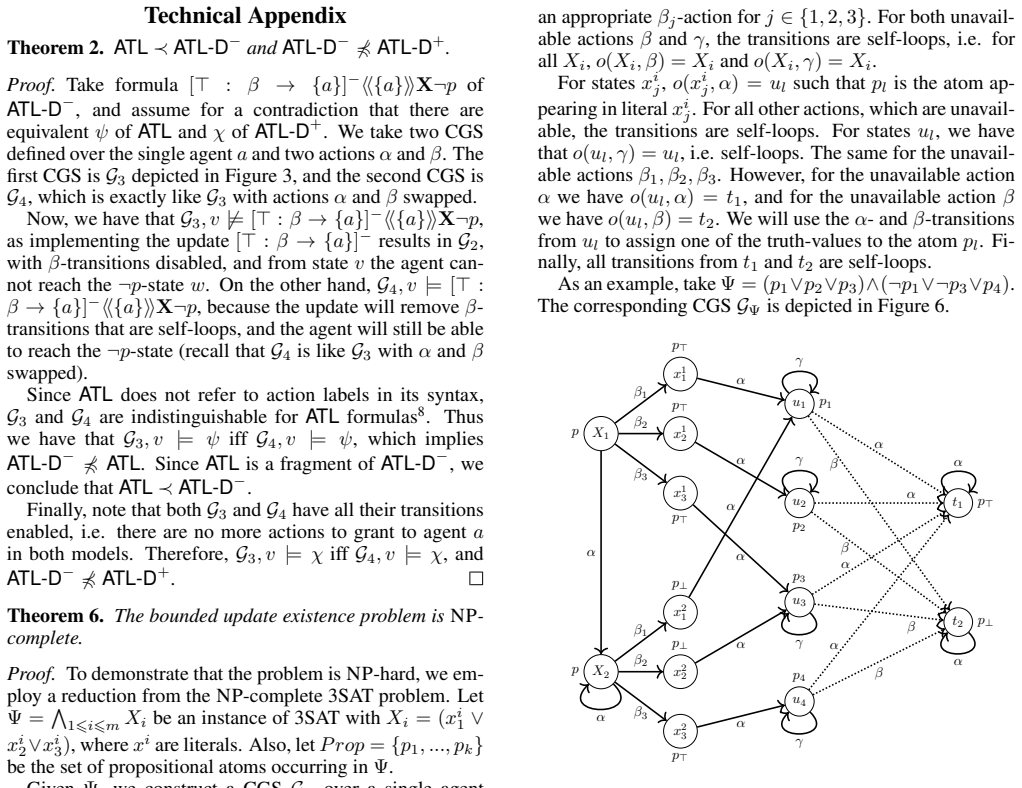
Recognition: unknown
I Would If I Could: Reasoning about Dynamics of Actions in Multi-Agent Systems
Pith reviewed 2026-05-07 14:18 UTC · model grok-4.3
The pith
ATL-D extends alternating-time temporal logic to model the granting and revoking of actions and their effects on agent knowledge.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce ATL with Dynamic Actions (ATL-D), which models the process of granting and revoking actions, and its extension ATEL-D, which captures how such updates affect agents' knowledge. Beyond the conceptual contribution, we provide several technical results: we analyse the expressivity of our logic in relation to ATL, study its relation to normative systems, and provide complexity results for relevant computational problems.
What carries the argument
ATL-D, the extension of ATL that adds explicit mechanisms for updating the sets of actions available to agents during system runs.
If this is right
- ATL-D expresses properties about changing action availability that lie outside the reach of standard ATL.
- ATEL-D represents how grants and revokes alter agents' knowledge of available strategies.
- Normative concepts such as permissions and obligations can be encoded through the action-update operators.
- Model checking and satisfiability problems for ATL-D and ATEL-D belong to specific complexity classes.
Where Pith is reading between the lines
- The framework supports verification of MAS in which action sets evolve according to external events or agent decisions.
- Complexity bounds can guide the choice between ATL-D and ATL when building automated reasoning tools for dynamic systems.
- The normative-system connection suggests direct uses for encoding changing rules or access rights inside strategic specifications.
Load-bearing premise
The mechanisms for updating action availability and knowledge can be added to ATL while preserving its original strategic semantics without creating inconsistencies.
What would settle it
A concrete two-agent game in which an action is granted or revoked at a specific point and the resulting ATL-D formula evaluates differently from the intuitive strategic outcome expected under the base ATL semantics.
Figures


read the original abstract
Autonomous agents acting in realistic Multi-Agent Systems (MAS) should be able to adapt during their execution. Standard strategic logics, such as Alternating-time Temporal Logic (ATL), model agents' state- or history-dependent behaviour. However, the dynamic treatment of agents' available actions and their knowledge of required actions is still rarely addressed. In this paper, we introduce ATL with Dynamic Actions (ATL-D), which models the process of granting and revoking actions, and its extension ATEL-D, which captures how such updates affect agents' knowledge. Beyond the conceptual contribution, we provide several technical results: we analyse the expressivity of our logic in relation to ATL, study its relation to normative systems, and provide complexity results for relevant computational problems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces ATL with Dynamic Actions (ATL-D), an extension of Alternating-time Temporal Logic that incorporates operators for granting and revoking actions during execution in multi-agent systems, together with its epistemic extension ATEL-D. It establishes technical results on the expressivity of ATL-D relative to ATL, its relationship to normative systems, and the complexity of model checking and satisfiability for the new logics.
Significance. If the formalization and proofs are correct, the work fills a recognized gap in strategic logics by treating action availability as a first-class dynamic feature rather than a fixed component of the model. The analyses of expressivity, normative-system encodings, and complexity supply concrete yardsticks that will be useful for both theoretical comparisons and practical verification of adaptive MAS. The explicit construction of update mechanisms that preserve ATL semantics while adding dynamics is a clear technical strength.
minor comments (5)
- [§3] §3 (Definition of ATL-D): the semantics of the grant/revoke operators are stated only at the level of transition-relation updates; an explicit inductive definition on the set of available actions per state, together with a small worked example, would make the preservation of ATL validity easier to verify.
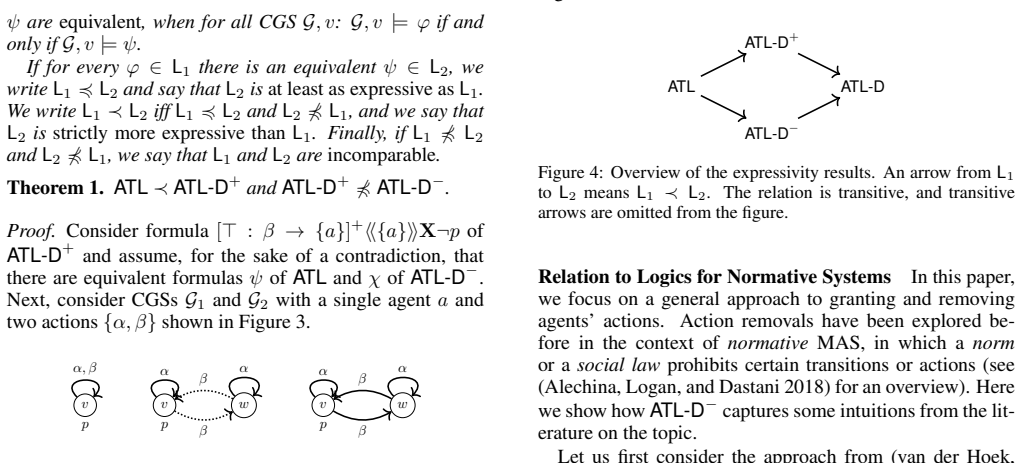
- [§5] §5 (Expressivity results): the proof that ATL-D is strictly more expressive than ATL relies on a formula that distinguishes two models; the argument would be strengthened by exhibiting the concrete ATL-D formula and the two models side-by-side rather than only sketching the separation.
- [§6] §6 (Normative systems): the embedding of normative constraints via action revocation is elegant, but the paper should clarify whether the embedding is polynomial or exponential in the size of the norm set; this affects the complexity claims that follow.
- [Table 1] Table 1 (Complexity summary): the entries for ATEL-D model checking list PSPACE-complete; it is unclear whether this bound is tight under the assumption of perfect recall or only for memoryless strategies—add a footnote or column to disambiguate.
- Notation: the symbol for the dynamic action-update operator is introduced as [·] in the text but appears as ⟨·⟩ in some later formulas; consistent use of a single delimiter would reduce reader confusion.
Simulated Author's Rebuttal
We thank the referee for the positive summary and significance assessment of our work introducing ATL-D and ATEL-D. We appreciate the recognition that the logics fill a gap by treating action availability as dynamic. The recommendation for minor revision is noted. No specific major comments were provided in the report.
Circularity Check
No significant circularity
full rationale
The paper defines ATL-D and ATEL-D via new syntax and semantics for action updates and epistemic effects, then derives expressivity comparisons to ATL, relations to normative systems, and complexity bounds from those definitions using standard logical techniques. No step reduces a claimed result to a fitted parameter, self-citation chain, or definitional renaming; all results are independent consequences of the introduced operators and models.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math ATL semantics for strategic abilities over game structures
- ad hoc to paper Update mechanisms for granting and revoking actions preserve model validity
invented entities (2)
-
ATL-D logic
no independent evidence
-
ATEL-D logic
no independent evidence
Reference graph
Works this paper leans on
-
[1]
In Kern-Isberner, G.; Lakemeyer, G.; and Meyer, T., eds.,Proceedings of the 19th KR, 12–21
Automatic synthesis of dynamic norms for multi- agent systems. In Kern-Isberner, G.; Lakemeyer, G.; and Meyer, T., eds.,Proceedings of the 19th KR, 12–21. Alechina, N.; Dastani, M.; and Logan, B. 2013. Reasoning about normative update. In Rossi, F., ed.,Proceedings of the 23rd IJCAI, 20–26. IJCAI/AAAI. Alechina, N.; Logan, B.; and Dastani, M. 2018. Modeli...
2013
-
[2]
Ballot, G.; Malvone, V .; Leneutre, J.; and Ma, J
IFAAMAS / ACM. Ballot, G.; Malvone, V .; Leneutre, J.; and Ma, J. 2025. Strategic reasoning with capacity-constrained agents and imperfect information. In Lynce, I.; Murano, N.; Vallati, M.; Villata, S.; Chesani, F.; Milano, M.; Omicini, A.; and Dastani, M., eds.,Proceedings of the 28th ECAI, volume 413 ofFrontiers in Artificial Intelligence and Applicati...
2025
-
[3]
In Walsh, T., ed.,Pro- ceedings of the 22nd IJCAI, 1659–1664
Verifying fault tolerance and self-diagnosability of an autonomous underwater vehicle. In Walsh, T., ed.,Pro- ceedings of the 22nd IJCAI, 1659–1664. IJCAI/AAAI. Fagin, R.; Halpern, J. Y .; Moses, Y .; and Vardi, M. 2003. Reasoning About Knowledge. MIT Press. Feinmann, D. 2025. A note on relevance.Journal of Se- mantics. To appear. Ferrando, A., and Malvon...
2003
-
[4]
van Ditmarsch, H.; van der Hoek, W.; and Kooi, B
Springer. van Ditmarsch, H.; van der Hoek, W.; and Kooi, B. 2008. Dynamic Epistemic Logic, volume 337 ofSynthese Library. Springer. Vel´azquez-Quesada, F. R. 2022. Communication between agents in dynamic epistemic logic.CoRRabs/2210.04656. Technical Appendix Theorem 2.A TL≺A TL-D − andA TL-D− ̸≼A TL-D+. Proof.Take formula[⊤:β→ {a}] −⟨ ⟨{a}⟩ ⟩X¬pof A TL-D−...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.