Recognition: unknown
Data-driven discovery of polynomial ODEs with provably bounded solutions
Pith reviewed 2026-05-07 09:21 UTC · model grok-4.3
The pith
A data-driven method recovers polynomial ODEs with provably bounded trajectories by jointly finding the vector field and a certifying Lyapunov function.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The paper establishes that polynomial ODEs with provably bounded trajectories can be discovered from data through a well-posed nonconvex optimization problem that is solved via an alternating block-coordinate scheme with convex subproblems, enabled by a novel initialization that identifies a candidate Lyapunov function directly from the data.
What carries the argument
The alternating block-coordinate optimization scheme that alternately solves for the coefficients of the polynomial vector field and the polynomial Lyapunov function, with feasibility guaranteed by the initialization procedure.
Load-bearing premise
The load-bearing premise is that the data come from a system whose behavior is well approximated by a low-degree polynomial vector field for which a polynomial Lyapunov function of modest degree can be found through the alternating optimization.
What would settle it
Finding a dynamical system where the true trajectories are bounded but the method either fails to recover a model or returns one without a certifying Lyapunov function, or conversely recovers a model that the method certifies as bounded but which actually has unbounded trajectories.
Figures







read the original abstract
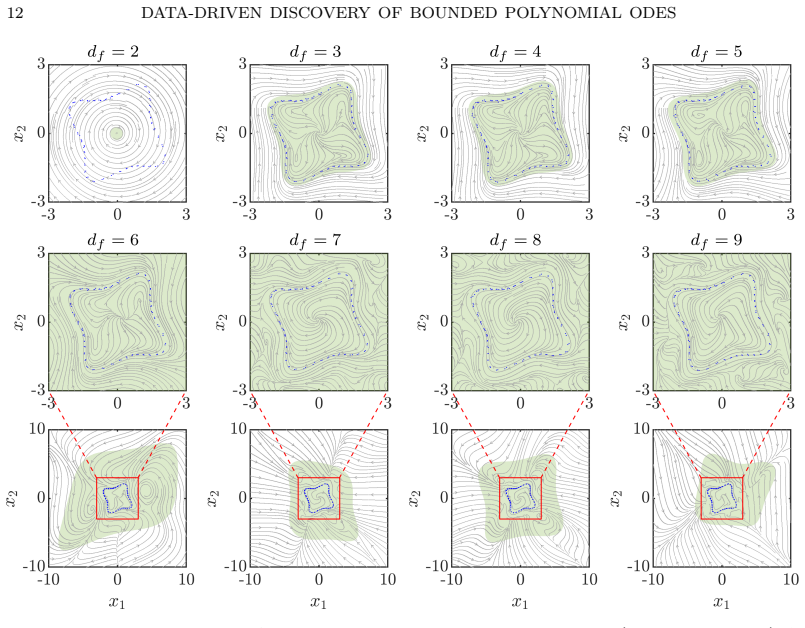
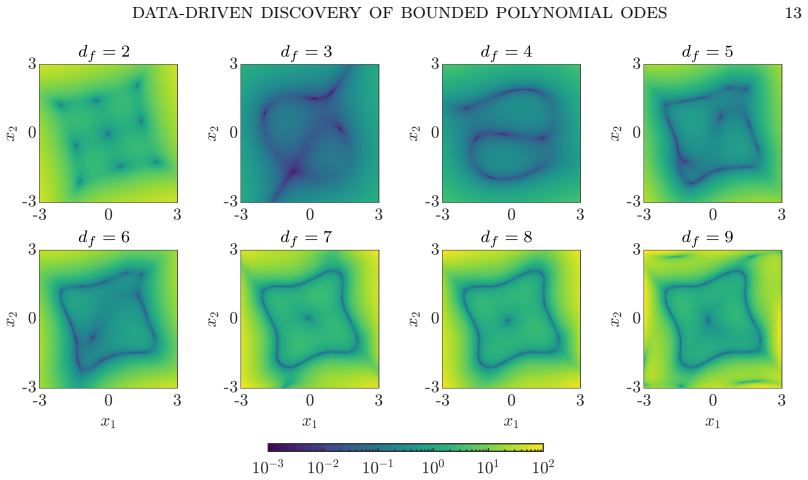
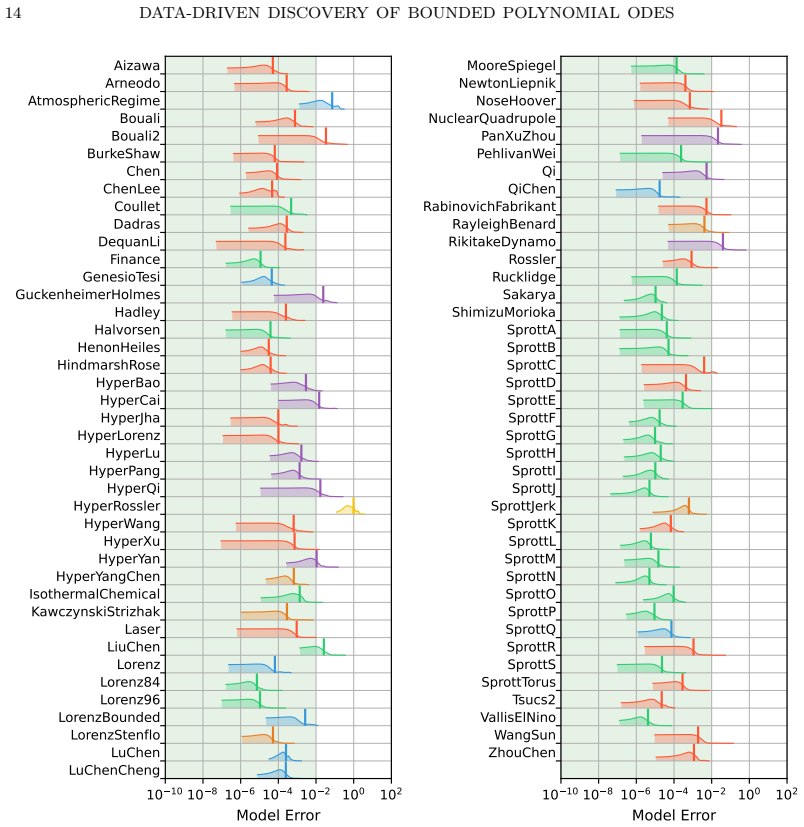
We introduce SILAS, a data-driven framework for discovering polynomial ordinary differential equations (ODEs) with provably bounded trajectories. Boundedness is certified by compact absorbing sets defined via polynomial Lyapunov functions. We jointly identify the ODE vector field and the Lyapunov function using a well-posed nonconvex optimization problem built using polynomial optimization tools. We solve this problem using an alternating block-coordinate optimization scheme with convex subproblems, whose feasibility is ensured by a novel model-agnostic initialization that identifies a candidate Lyapunov function from data. Our methods extend prior approaches for quadratic ODEs with absorbing ellipsoids to a significantly broader class of ODEs and absorbing sets. A suite of over 100 examples demonstrates that SILAS can recover accurate and provably bounded ODE models for a broad range of nonlinear dynamical systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces SILAS, a data-driven framework that jointly identifies a polynomial vector field and a polynomial Lyapunov function from trajectory data via a nonconvex optimization problem solved by alternating block-coordinate descent on convex subproblems. Boundedness is certified by the existence of a compact absorbing set defined by the Lyapunov function. The method is initialized with a model-agnostic procedure that finds an initial feasible Lyapunov function, and the approach is validated empirically on a suite of over 100 examples spanning nonlinear dynamical systems.
Significance. If the alternating procedure reliably recovers accurate polynomial models together with valid Lyapunov certificates, the work would meaningfully extend data-driven discovery beyond quadratic ODEs with ellipsoidal bounds, providing explicit safety guarantees useful for control and verification. The scale of the numerical demonstration and the convex-subproblem structure are positive features; however, the absence of convergence analysis or failure-mode quantification limits the strength of the central claim that the method works for the broader class invoked in the abstract.
major comments (2)
- [optimization procedure (alternating scheme)] The alternating block-coordinate scheme for the joint nonconvex problem (described in the optimization section following the problem formulation) lacks any convergence analysis, basin characterization, or quantification of how often it reaches points where the data-fit residual remains large or the Lyapunov certificate becomes invalid after rounding. This is load-bearing for the claim that SILAS recovers accurate and provably bounded models on the reported suite, because each block subproblem being convex does not guarantee that alternation avoids stationary points that are feasible yet inaccurate.
- [numerical results / examples] No error bars, sensitivity analysis with respect to polynomial degree selection, or statistics on how often the post-hoc degree choice affects certificate validity are provided in the numerical results section. This weakens the assertion of success across more than 100 examples, as the central claim relies on the procedure producing both accurate dynamics and valid certificates without quantifying variability or failure rates.
minor comments (2)
- [problem formulation] The notation for the polynomial bases and the precise definition of the absorbing-set radius should be stated more explicitly when first introduced, to avoid ambiguity when comparing to prior quadratic-ODE work.
- [figures] A few figure captions in the examples section could more clearly indicate which trajectories are training data versus validation trajectories.
Simulated Author's Rebuttal
We thank the referee for the constructive review and positive remarks on the framework's scope and numerical demonstration. We respond to each major comment below, indicating where revisions are planned.
read point-by-point responses
-
Referee: The alternating block-coordinate scheme for the joint nonconvex problem (described in the optimization section following the problem formulation) lacks any convergence analysis, basin characterization, or quantification of how often it reaches points where the data-fit residual remains large or the Lyapunov certificate becomes invalid after rounding. This is load-bearing for the claim that SILAS recovers accurate and provably bounded models on the reported suite, because each block subproblem being convex does not guarantee that alternation avoids stationary points that are feasible yet inaccurate.
Authors: We acknowledge the absence of a theoretical convergence analysis for the alternating scheme. Each block subproblem is convex and solved to global optimality, while the model-agnostic initialization explicitly constructs a feasible starting Lyapunov function from data. The joint problem remains nonconvex, so global convergence or basin characterization is not available. In revision we will expand the optimization section with a dedicated paragraph discussing these limitations, reporting observed iteration counts and residual behavior across the example suite, and clarifying that the method relies on empirical reliability rather than provable convergence to accurate models. revision: partial
-
Referee: No error bars, sensitivity analysis with respect to polynomial degree selection, or statistics on how often the post-hoc degree choice affects certificate validity are provided in the numerical results section. This weakens the assertion of success across more than 100 examples, as the central claim relies on the procedure producing both accurate dynamics and valid certificates without quantifying variability or failure rates.
Authors: The numerical results section reports success on more than 100 examples without error bars, degree-sensitivity studies, or aggregate statistics on post-rounding certificate validity. We agree that such quantification would strengthen the presentation. In the revision we will add a short subsection (or appendix) containing sensitivity results for a representative subset of systems, including the effect of degree choice on certificate validity, and report the fraction of examples in which the rounded Lyapunov function remains valid. Full error bars and exhaustive failure-mode statistics for every example would require substantial additional computation beyond the current scope. revision: partial
- Theoretical convergence analysis or basin characterization for the nonconvex alternating block-coordinate scheme
- Comprehensive error bars, sensitivity analysis, and failure-rate statistics across the entire suite of more than 100 examples
Circularity Check
No significant circularity in the derivation chain
full rationale
The paper presents SILAS as a new algorithmic framework that formulates a joint nonconvex optimization problem over polynomial vector-field coefficients and a polynomial Lyapunov function, then solves it via alternating convex block-coordinate steps initialized by a model-agnostic procedure. No step in the abstract or described method reduces a claimed prediction, uniqueness result, or boundedness certificate to a fitted parameter or self-citation by construction; the extension of prior quadratic-ODE work is stated as a generalization rather than a load-bearing premise that defines the new result. The central contribution is therefore an empirically validated procedure whose validity rests on the optimization formulation and numerical examples, not on any tautological re-expression of its inputs.
Axiom & Free-Parameter Ledger
free parameters (1)
- polynomial degree for vector field and Lyapunov function
axioms (1)
- domain assumption The underlying system admits a polynomial approximation whose trajectories remain inside a compact absorbing set certified by a polynomial Lyapunov function.
Reference graph
Works this paper leans on
-
[1]
Abyaneh and H.-C
A. Abyaneh and H.-C. Lin. Learning Lyapunov-stable polynomial dynamical systems through imitation. In J. Tan, M. Toussaint, and K. Darvish, editors,Proc. 7th Conf. Robot Learn., volume 229 ofProc. Mach. Learn. Res., pages 2642–2662. PMLR, 2023. DATA-DRIVEN DISCOVERY OF BOUNDED POLYNOMIAL ODES 21
2023
-
[2]
Jay Shah, Ganesh Bikshandi, Ying Zhang, Vijay Thakkar, Pradeep Ramani, and Tri Dao
A. Abyaneh, M. S. Guzmán, and H.-C. Lin. Globally stable neural imitation policies. In2024 IEEE Int. Conf. Robot. Autom. (ICRA), pages 15061–15067. IEEE, 2024. doi: 10.1109/ICRA57147.2024.10610791
-
[3]
A. A. Ahmadi and B. E. Khadir. Learning dynamical systems with side information. SIAM Review, 65(1):183–223, 2023. doi: 10.1137/20M1388644
-
[4]
ApS.MOSEK Optimization Toolbox for MATLAB 11.1.11, 2026
M. ApS.MOSEK Optimization Toolbox for MATLAB 11.1.11, 2026
2026
-
[5]
Y.Bar-Sinai, S.Hoyer, J.Hickey, andM.P.Brenner. Learningdata-drivendiscretizations for partial differential equations.Proc. Natl. Acad. Sci. USA, 116(31):15344–15349, 2019. doi: 10.1073/pnas.1814058116
-
[6]
A. Beck and L. Tetruashvili. On the convergence of block coordinate descent type meth- ods.SIAM J. Optim., 23(4):2037–2060, 2013. doi: 10.1137/120887679
-
[7]
D. P. Bertsekas.Nonlinear programming. Athena Scientific Optimization and Computa- tion Series. Athena Scientific, Belmont, MA, second edition, 1999. ISBN 1-886529-00-0
1999
-
[8]
M. Bou-Sakr-El-Tayar, J. J. Bramburger, and M. J. Colbrook. Weighted Birkhoff aver- ages accelerate data-driven methods. arXiv:2511.17772 [math.DS], 2025
-
[9]
J. J. Bramburger and G. Fantuzzi. Auxiliary functions as Koopman observables: data- driven analysis of dynamical systems via polynomial optimization.J. Nonlinear Sci., 34 (1):Paper No. 8, 38, 2024. doi: 10.1007/s00332-023-09990-2
-
[10]
J. J. Bramburger, S. L. Brunton, and J. Nathan Kutz. Deep learning of conjugate mappings.Phys. D, 427:Paper No. 133008, 16, 2021. doi: 10.1016/j.physd.2021.133008
-
[11]
M. M. Bronstein, J. Bruna, T. Cohen, and P. Veličković. Geometric deep learning: Grids, groups, graphs, geodesics, and gauges. arXiv:2104.13478 [cs.LG], 2021
work page internal anchor Pith review arXiv 2021
-
[12]
K. J. Burns, G. M. Vasil, J. S. Oishi, D. Lecoanet, and B. P. Brown. Dedalus: A flexible framework for numerical simulations with spectral methods.Phys. Rev. Res., 2:023068, Apr 2020. doi: 10.1103/PhysRevResearch.2.023068
-
[13]
T. Cunis and J. Olucak. CaΣos: A nonlinear sum-of-squares optimization suite. In2025 American Control Conf. (ACC), pages 1659–1666, 2025. doi: 10.23919/ACC63710.2025. 11107794
-
[14]
C. R. Doering and J. D. Gibbon.Applied analysis of the Navier-Stokes equations. Cam- bridge Texts in Applied Mathematics. Cambridge University Press, Cambridge, 1995. ISBN 0-521-44557-4; 0-521-44568-X. doi: 10.1017/CBO9780511608803
-
[15]
T. A. Driscoll, N. Hale, and L. N. Trefethen.Chebfun Guide. Pafnuty Publications, 2014
2014
-
[16]
J. Elezgaray and A. Arneodo. Crisis-induced intermittent bursting in reaction-diffusion chemical systems.Phys. Rev. Lett., 68:714–717, 1992. doi: 10.1103/PhysRevLett.68.714
-
[17]
G. Fantuzzi, D. Goluskin, D. Huang, and S. I. Chernyshenko. Bounds for deterministic and stochastic dynamical systems using sum-of-squares optimization.SIAM J. Appl. Dyn. Syst., 15(4):1962–1988, 2016. doi: 10.1137/15M1053347
-
[18]
W. Gilpin. Chaos as an interpretable benchmark for forecasting and data-driven mod- elling. In35th Conf. Neural Inform. Process. Syst. Datasets and Benchmarks Track (Round 2), 2021
2021
-
[19]
Goertzen, S
A. Goertzen, S. Tang, and N. Azizan. Learning chaotic PDEs with boundedness guar- antees. InNeurIPS 2025 AI for Science Workshop, 2025
2025
-
[20]
D. Goluskin. Bounding extrema over global attractors using polynomial optimisation. Nonlinearity, 33(9):4878–4899, 2020. doi: 10.1088/1361-6544/ab8f7b
-
[21]
P. Goyal and P. Benner. Discovery of nonlinear dynamical systems using a Runge- Kutta inspired dictionary-based sparse regression approach.Proc. A, 478(2262):Paper No. 20210883, 24, 2022. doi: 10.1098/rspa.2021.0883. 22 DATA-DRIVEN DISCOVERY OF BOUNDED POLYNOMIAL ODES
-
[22]
P. Goyal, I. Pontes Duff, and P. Benner. Guaranteed stable quadratic models and their applications in SINDy and operator inference.Phys. D, 483:Paper No. 134893, 16, 2025. doi: 10.1016/j.physd.2025.134893
-
[23]
Greydanus, M
S. Greydanus, M. Dzamba, and J. Yosinski. Hamiltonian neural networks. InProc. 33rd Int. Conf. Neural Inform. Proc. Syst., Red Hook, NY, USA, 2019. Curran Associates Inc
2019
-
[24]
Grippo and M
L. Grippo and M. Sciandrone. Globally convergent block-coordinate techniques for un- constrained optimization.Optim. Methods Softw., 10(4):587–637, 1999. doi: 10.1080/ 10556789908805730
1999
- [25]
-
[26]
D. Henrion and M. Korda. Convex computation of the region of attraction of polynomial controlsystems.IEEE Trans. Automat. Control, 59(2):297–312, 2014. doi: 10.1109/TAC. 2013.2283095
work page doi:10.1109/tac 2014
-
[27]
D. Hilbert. Ueber die Darstellung definiter Formen als Summe von Formenquadraten. Math. Ann., 32(3):342–350, 1888. doi: 10.1007/BF01443605
-
[28]
Holmes, J
P. Holmes, J. L. Lumley, G. Berkooz, and C. W. Rowley.Turbulence, coherent structures, dynamical systems and symmetry. Cambridge Monographs on Mechanics. Cambridge University Press, Cambridge, second edition, 2012. ISBN 978-1-107-00825-0. doi: 10. 1017/CBO9780511919701
2012
-
[29]
A. A. Kaptanoglu, J. L. Callaham, A. Aravkin, C. J. Hansen, and S. L. Brunton. Pro- moting global stability in data-driven models of quadratic nonlinear dynamics.Phys. Rev. Fluids, 6(9):094401, 2021. doi: 10.1103/PhysRevFluids.6.094401
- [30]
-
[31]
S. Klus, P. Koltai, and C. Schütte. On the numerical approximation of the Perron- Frobenius and Koopman operator.J. Comput. Dyn., 3(1):51–79, 2016. doi: 10.3934/ jcd.2016003
2016
-
[32]
S. Klus, F. Nüske, S. Peitz, J.-H. Niemann, C. Clementi, and C. Schütte. Data-driven approximation of the Koopman generator: Model reduction, system identification, and control.Phys. D, 406:132416, 15, 2020. doi: 10.1016/j.physd.2020.132416
-
[33]
M. Korda. Computing controlled invariant sets from data using convex optimization. SIAM J. Control Optim., 58(5):2871–2899, 2020. doi: 10.1137/19M1305835
-
[34]
Korda and I
M. Korda and I. Mezić. On convergence of extended dynamic mode decomposition to the Koopman operator.J. Nonlinear Sci., 28(2):687–710, 2018. doi: 10.1007/ s00332-017-9423-0
2018
-
[35]
Korda, D
M. Korda, D. Henrion, and C. N. Jones. Convex computation of the maximum controlled invariant set for polynomial control systems.SIAM J. Control Optim., 52(5):2944–2969,
-
[36]
doi: 10.1137/130914565
-
[37]
J. B. Lasserre. Global optimization with polynomials and the problem of moments. SIAM J. Optim., 11(3):796–817, 2000/01. doi: 10.1137/S1052623400366802
-
[38]
Imperial College Press, London, 2010
J.B.Lasserre.Moments, positive polynomials and their applications, volume1ofImperial College Press Optimization Series. Imperial College Press, London, 2010. ISBN 978-1- 84816-445-1; 1-84816-445-9
2010
-
[39]
J. B. Lasserre, D. Henrion, C. Prieur, and E. Trélat. Nonlinear optimal control via occupation measures and LMI-relaxations.SIAM J. Control Optim., 47(4):1643–1666, DATA-DRIVEN DISCOVERY OF BOUNDED POLYNOMIAL ODES 23
-
[40]
doi: 10.1137/070685051
-
[41]
M. Laurent. Sums of squares, moment matrices and optimization over polynomi- als. InEmerging applications of algebraic geometry, volume 149 ofIMA Vol. Math. Appl., pages 157–270. Springer, New York, 2009. ISBN 978-0-387-09685-8. doi: 10.1007/978-0-387-09686-5_7
-
[42]
S.-C. Liao, A. Leonid Heide, M. S. Hemati, and P. J. Seiler. A convex optimization approach to compute trapping regions for lossless quadratic systems.Internat. J. Robust Nonlinear Control, 35(6):2425–2436, 2025. doi: 10.1002/rnc.7807
-
[43]
J. Lofberg. YALMIP: A toolbox for modeling and optimization in MATLAB. In2004 IEEE Int. Conf. Robotics & Automation, pages 284–289, 2004. doi: 10.1109/CACSD. 2004.1393890
-
[44]
Mauroy and A
A. Mauroy and A. Sootla. Estimation of regions of attraction with formal certificates in a purely data-driven setting. In62nd IEEE Conf. Decis. Control (CDC), pages 4682–4687,
-
[45]
doi: 10.1109/CDC49753.2023.10383454
-
[46]
A. Mauroy, A. Sootla, and I. Mezić. Koopman framework for global stability analysis. InThe Koopman operator in systems and control—concepts, methodologies and applica- tions, volume 484 ofLect. Notes Control Inf. Sci., pages 35–58. Springer, Cham, 2020. ISBN 978-3-030-35712-2. doi: 10.1007/978-3-030-35713-9_2
-
[47]
K. G. Murty and S. N. Kabadi. Some NP-complete problems in quadratic and nonlinear programming.Math. Programming, 39(2):117–129, 1987. doi: 10.1007/BF02592948
-
[48]
A. Nemirovski. Advances in convex optimization: conic programming. InInternational Congress of Mathematicians. Vol. I, pages 413–444. Eur. Math. Soc., Zürich, 2007. ISBN 978-3-03719-022-7. doi: 10.4171/022-1/17
-
[49]
Y. Nesterov. Squared functional systems and optimization problems. InHigh perfor- mance optimization, volume 33 ofAppl. Optim., pages 405–440. Kluwer Acad. Publ., Dordrecht, 2000. ISBN 0-7923-6013-3. doi: 10.1007/978-1-4757-3216-0_17
-
[50]
Y. Nesterov and A. Nemirovskii.Interior-point polynomial algorithms in convex pro- gramming, volume 13 ofSIAM Studies in Applied Mathematics. Society for Industrial and Applied Mathematics (SIAM), Philadelphia, PA, 1994. ISBN 0-89871-319-6. doi: 10.1137/1.9781611970791
-
[51]
J. Olucak and T. Cunis. Sequential quadratic sum-of-squares programming for nonlinear control systems. arXiv:2602.02394 [math.OC], 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[52]
S. E. Otto, N. Zolman, J. N. Kutz, and S. L. Brunton. A unified framework to enforce, discover, and promote symmetry in machine learning.J. Mach. Learn. Res., 26:Paper No. [248], 83, 2025
2025
-
[53]
A. Papachristodoulou and S. Prajna. A tutorial on sum of squares techniques for systems analysis. InProc. 2005 American Control Conf., pages 2686–2700 vol. 4, 2005. doi: 10.1109/ACC.2005.1470374
-
[54]
P. A. Parrilo. Semidefinite programming relaxations for semialgebraic problems.Math. Program., 96(2, Ser. B):293–320, 2003. doi: 10.1007/s10107-003-0387-5
-
[55]
Polynomialoptimization, sumsofsquares, andapplications
P.A.Parrilo. Polynomialoptimization, sumsofsquares, andapplications. InSemidefinite optimization and convex algebraic geometry, volume 13 ofMOS-SIAM Ser. Optim., pages 47–157. SIAM, Philadelphia, PA, 2013. ISBN 978-1-611972-28-3
2013
-
[56]
M. Peng, A. A. Kaptanoglu, C. J. Hansen, J. Stevens-Haas, K. Manohar, and S. L. Brun- ton. Extending the trapping theorem to provide local stability guarantees for quadrati- cally nonlinear models.Phys. Fluids, 37(10):107115, 10 2025. doi: 10.1063/5.0287432
-
[57]
Rindler.Calculus of variations
F. Rindler.Calculus of variations. Universitext. Springer, Cham, 2018. ISBN 978-3-319- 77636-1; 978-3-319-77637-8. doi: 10.1007/978-3-319-77637-8. 24 DATA-DRIVEN DISCOVERY OF BOUNDED POLYNOMIAL ODES
-
[58]
M. Schlegel and B. R. Noack. On long-term boundedness of Galerkin models.J. Fluid Mech., 765:325–352, 2015. doi: 10.1017/jfm.2014.736
-
[59]
M. Tacchi, Y. Lian, and C. N. Jones. Robustly learning regions of attraction from fixed data.IEEE Trans. Automat. Control, 70(3):1576–1591, 2025. doi: 10.1109/tac.2024. 3462528
- [60]
-
[61]
U. Topcu, A. Packard, and P. Seiler. Local stability analysis using simulations and sum- of-squares programming.Automatica J. IFAC, 44(10):2669–2675, 2008. doi: 10.1016/j. automatica.2008.03.010
work page doi:10.1016/j 2008
-
[62]
M. O. Williams, I. G. Kevrekidis, and C. W. Rowley. A data-driven approximation of the Koopman operator: extending dynamic mode decomposition.J. Nonlinear Sci., 25 (6):1307–1346, 2015. doi: 10.1007/s00332-015-9258-5
-
[63]
Ye.Interior Point Algorithms: Theory and Analysis
Y. Ye.Interior Point Algorithms: Theory and Analysis. John Wiley & Sons, Ltd, 1997. ISBN 9780471174202. doi: 10.1002/9781118032701. AppendixA.Absorbing sets for the ODE in Section 3.1 We show that the two-dimensional ODE˙x=f ∗(x)withf ∗ given by (3.1) has a compact absorbing set described by a quartic polynomial Lyapunov function, but no absorbing ellipso...
-
[64]
We then conclude thatv(x)≥x 2 1 +x 2 2, sovis coercive. To prove thatvsatisfies the Lyapunov inequality (2.4) forα= 1and a suitably largeb, it suffices to show that the leading-order homogeneous part of the polynomial b−v− ⟨f,∇v⟩is coercive. A straightforward computation gives b−v− ⟨f,∇v⟩= 1 3 x6 1 +x 5 1x2 +x 4 1x2 2 +x 2 1x4 2 −x 1x5 2 +x 6 2 +lower-deg...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.