Recognition: unknown
Breaking the Communication-Accuracy Trade-off: A Sparsified Information Diffusion Framework for Multi-Agent Collaborative Perception
Pith reviewed 2026-05-09 18:52 UTC · model grok-4.3
The pith
An event-triggered cubature information filter with correlation-aware diffusion improves multi-agent tracking accuracy while cutting communication and computation.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
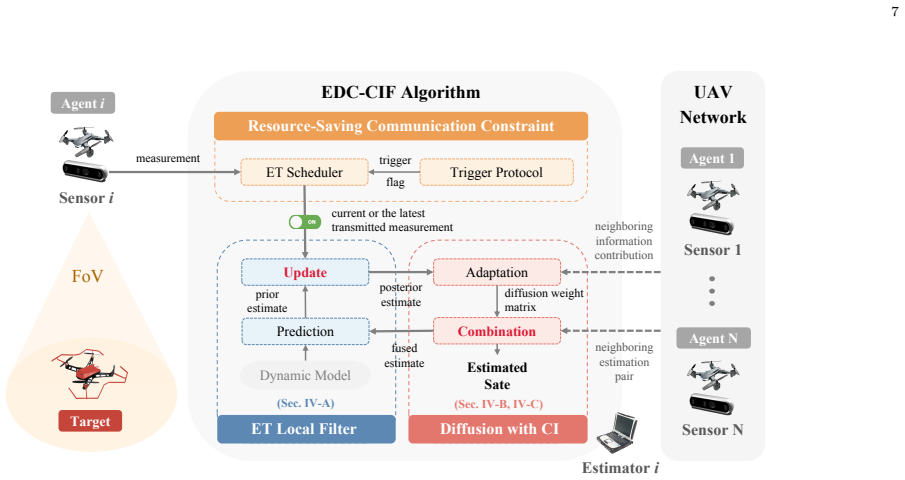
The EDC-CIF algorithm employs an error-minimized event-triggered cubature information filter for each agent's local estimate and a correlation-aware diffusion strategy for global fusion, simultaneously raising tracking accuracy, lowering total data transmission, and speeding convergence compared with conventional event-triggered methods.
What carries the argument
Error-minimized event-triggered cubature information filter for local estimation combined with correlation-aware diffusion strategy for selective global fusion.
If this is right
- Fewer messages per agent enable larger teams to operate under the same bandwidth limit.
- Faster convergence reduces the time lag between target motion and the fused estimate available to every agent.
- Lower local computation time frees processing resources for other onboard tasks such as planning.
- The method scales without proportional growth in communication volume as the number of agents increases.
Where Pith is reading between the lines
- The same sparsification idea could apply to other distributed estimation tasks such as cooperative localization or map merging.
- Hardware tests with actual wireless delays would reveal whether the correlation-aware trigger remains stable when packet loss occurs.
- If the gains persist, the filter could relax the need for high-bandwidth links in large drone or robot swarms.
Load-bearing premise
The local error-minimization step and the selective diffusion rule can be realized in practice without introducing new estimation errors or excessive onboard computation that would erase the claimed simultaneous gains.
What would settle it
In a controlled multi-agent simulation with increasing numbers of agents and realistic sensor noise, the proposed filter shows either higher estimation error or no reduction in transmitted packets relative to a standard event-triggered cubature information filter.
Figures







read the original abstract
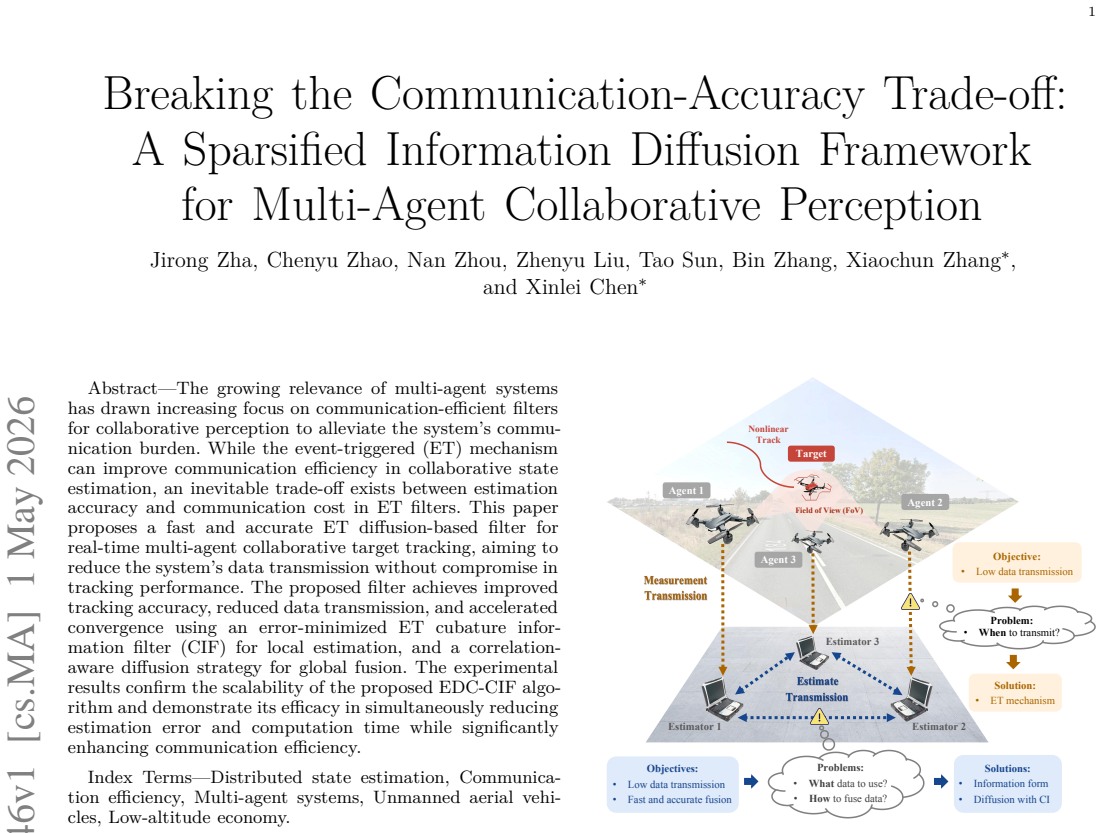
The growing relevance of multi-agent systems has drawn increasing focus on communication-efficient filters for collaborative perception to alleviate the system's communication burden. While the event-triggered (ET) mechanism can improve communication efficiency in collaborative state estimation, an inevitable trade-off exists between estimation accuracy and communication cost in ET filters. This paper proposes a fast and accurate ET diffusion-based filter for real-time multi-agent collaborative target tracking, aiming to reduce the system's data transmission without compromise in tracking performance. The proposed filter achieves improved tracking accuracy, reduced data transmission, and accelerated convergence using an error-minimized ET cubature information filter (CIF) for local estimation, and a correlation-aware diffusion strategy for global fusion. The experimental results confirm the scalability of the proposed EDC-CIF algorithm and demonstrate its efficacy in simultaneously reducing estimation error and computation time while significantly enhancing communication efficiency.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
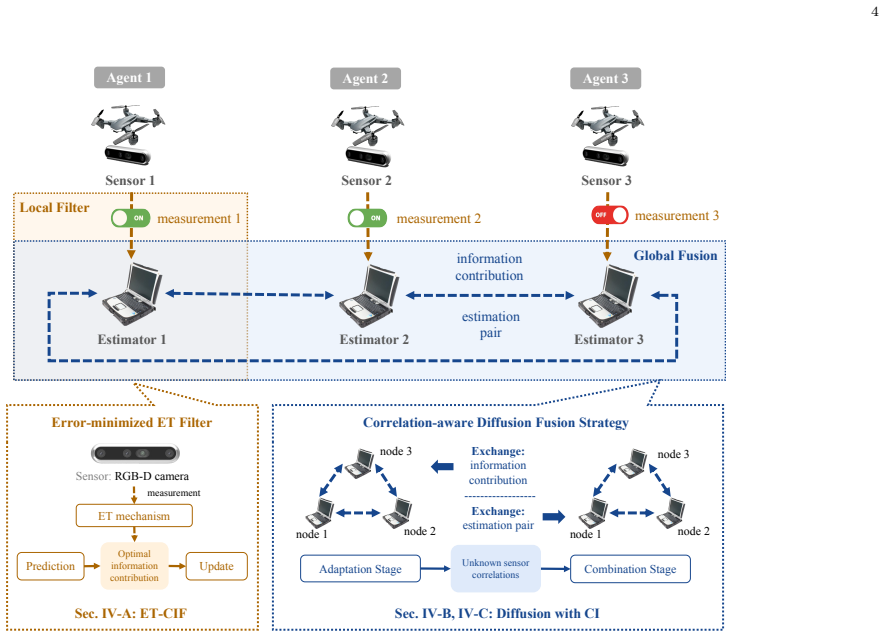
Summary. The paper proposes a sparsified information diffusion framework for multi-agent collaborative perception to break the communication-accuracy trade-off in real-time target tracking. It introduces an error-minimized event-triggered cubature information filter (ET-CIF) for local estimation combined with a correlation-aware diffusion strategy for global fusion, claiming simultaneous gains in tracking accuracy, reduced data transmission, and accelerated convergence. Experiments are reported to confirm the scalability of the EDC-CIF algorithm and its efficacy in lowering estimation error and computation time while improving communication efficiency.
Significance. If the central claims hold with rigorous validation, this would be a meaningful contribution to multi-agent systems and collaborative perception by enabling efficient distributed estimation without the usual performance penalty. The approach extends cubature information filters and diffusion methods in a practical direction for resource-constrained settings such as robotic swarms. The reported experimental confirmation of scalability is a positive element, though the overall significance depends on demonstrating that the proposed components do not introduce unaccounted inconsistencies.
major comments (2)
- [§3] §3 (Proposed EDC-CIF framework): The error-minimization step within the event-triggered cubature information filter is asserted to maintain accuracy while reducing transmissions, but no derivation or bound is supplied showing that this step preserves the information-matrix properties required for unbiased, consistent fusion in the subsequent correlation-aware diffusion step. This is load-bearing for the 'no compromise' guarantee, especially under the model mismatch or non-Gaussian conditions highlighted in the stress-test note.
- [§4] §4 (Experimental validation): The reported results claim simultaneous reductions in estimation error, computation time, and communication volume, yet the manuscript supplies no error bars, statistical tests, or explicit trials under deliberate model mismatch or time-varying correlations. Without these, the evidence does not yet establish that the claimed gains are robust rather than scenario-specific.
minor comments (2)
- [Abstract] Abstract: The acronym EDC-CIF appears without expansion on first use; define it explicitly (e.g., Error-minimized Diffusion Cubature Information Filter) for clarity.
- [Methods] Notation: The distinction between local information matrices and the diffused global quantities should be made more explicit in the methods section to aid reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review of our manuscript. We appreciate the acknowledgment of the potential contribution of the EDC-CIF framework to multi-agent collaborative perception. We address each major comment below and outline the revisions we will make to strengthen the paper.
read point-by-point responses
-
Referee: [§3] §3 (Proposed EDC-CIF framework): The error-minimization step within the event-triggered cubature information filter is asserted to maintain accuracy while reducing transmissions, but no derivation or bound is supplied showing that this step preserves the information-matrix properties required for unbiased, consistent fusion in the subsequent correlation-aware diffusion step. This is load-bearing for the 'no compromise' guarantee, especially under the model mismatch or non-Gaussian conditions highlighted in the stress-test note.
Authors: We thank the referee for this observation. The error-minimization criterion in the ET-CIF (Section 3.2) is formulated to select the sparsified information vector minimizing the trace of the local posterior covariance while ensuring the updated information matrix remains positive definite by construction. However, we agree that an explicit lemma deriving bounds on the deviation from the full-information matrix and its impact on the consistency of the subsequent correlation-aware diffusion step is not provided. In the revised manuscript, we will insert a new Lemma 1 that establishes these preservation properties under the standard Gaussian assumption, together with a brief discussion of bounded-error behavior under mild model mismatch and non-Gaussian noise. This addition will directly support the claimed absence of performance compromise. revision: yes
-
Referee: [§4] §4 (Experimental validation): The reported results claim simultaneous reductions in estimation error, computation time, and communication volume, yet the manuscript supplies no error bars, statistical tests, or explicit trials under deliberate model mismatch or time-varying correlations. Without these, the evidence does not yet establish that the claimed gains are robust rather than scenario-specific.
Authors: The referee correctly notes that the current experimental section relies on representative single-run trajectories for visual clarity. We will revise Section 4 to include (i) error bars and standard deviations computed over 100 independent Monte Carlo trials for all reported metrics, (ii) paired statistical tests (t-tests with p-values) against the baseline methods to confirm significance of the observed improvements, and (iii) two additional simulation suites that deliberately introduce model mismatch (incorrect process-noise covariance) and time-varying inter-agent correlation coefficients. These extensions will provide quantitative evidence of robustness beyond the scenarios originally presented. revision: yes
Circularity Check
No significant circularity; derivation remains self-contained
full rationale
The paper introduces an error-minimized event-triggered cubature information filter combined with a correlation-aware diffusion strategy as a novel construction for breaking the communication-accuracy trade-off. No equations or derivation steps are exhibited that reduce by construction to fitted parameters, self-definitions, or load-bearing self-citations. The local error-minimization and global fusion steps are presented as independent algorithmic choices whose performance is then validated experimentally, without the central claims collapsing into tautological renaming or ansatz smuggling. The framework therefore retains independent content beyond its inputs.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Sensing-based distributed state estimation for cooperative multiagent systems,
C. Kwon and I. Hwang, “Sensing-based distributed state estimation for cooperative multiagent systems,” IEEE Trans- actions on Automatic Control, vol. 64, no. 6, pp. 2368–2382, 2018
2018
-
[2]
MR-COGraphs: Communication- efficient Multi-Robot Open-vocabulary Mapping System via 3D Scene Graphs,
Q. Gu, Z. Ye, J. Yu et al., “MR-COGraphs: Communication- efficient Multi-Robot Open-vocabulary Mapping System via 3D Scene Graphs,” IEEE Robotics and Automation Letters, 2025
2025
-
[3]
An overview of recent progress in the study of distributed multi-agent coordination,
Y. Cao, W. Yu, W. Ren, and G. Chen, “An overview of recent progress in the study of distributed multi-agent coordination,” IEEE Transactions on Industrial informatics, vol. 9, no. 1, pp. 427–438, 2012
2012
-
[4]
Network localiza- tion and navigation via cooperation,
M. Z. Win, A. Conti, S. Mazuelas et al., “Network localiza- tion and navigation via cooperation,” IEEE Communications Magazine, vol. 49, no. 5, pp. 56–62, 2011
2011
-
[5]
Multi-agent distributed optimal control for tracking large-scale multi-target systems in dynamic environments,
A. Z. Abdulghafoor and E. Bakolas, “Multi-agent distributed optimal control for tracking large-scale multi-target systems in dynamic environments,” IEEE Transactions on Cybernetics, vol. 54, no. 5, pp. 2866–2879, 2023
2023
-
[6]
Multi-agent formation control with target tracking and navigation,
L. Liu, C. Luo, and F. Shen, “Multi-agent formation control with target tracking and navigation,” in 2017 IEEE Inter- national Conference on Information and Automation (ICIA), 2017, pp. 98–103
2017
-
[7]
Transformloc: Transforming mavs into mobile localization infrastructures in heterogeneous swarms,
H. Wang, J. Xu et al., “Transformloc: Transforming mavs into mobile localization infrastructures in heterogeneous swarms,” in IEEE INFOCOM 2024-IEEE Conference on Computer Communications. IEEE, 2024, pp. 1101–1110
2024
-
[8]
Adaptive finite-time tracking control of nonholonomic multirobot formation systems with limited field-of-view sensors,
S.-L. Dai, K. Lu, and J. Fu, “Adaptive finite-time tracking control of nonholonomic multirobot formation systems with limited field-of-view sensors,” IEEE Transactions on cybernet- ics, vol. 52, no. 10, pp. 10 695–10 708, 2021
2021
-
[9]
Multi-uav cooperative pursuit strategy with limited visual field in urban airspace: A multi-agent reinforcement learning approach,
Z. Peng, G. Wu, B. Luo, and L. Wang, “Multi-uav cooperative pursuit strategy with limited visual field in urban airspace: A multi-agent reinforcement learning approach,” IEEE/CAA Journal of Automatica Sinica, 2025
2025
-
[10]
A dis- tributed cooperative dynamic target search method for multi- uav systems in complex adversarial environments,
Y. Li, W. Chen, B. Fu, S. Liu, L. Hao, and Z. Wu, “A dis- tributed cooperative dynamic target search method for multi- uav systems in complex adversarial environments,” IEEE Internet of Things Journal, 2025
2025
-
[11]
Uav swarm cooperative target search: A multi-agent reinforcement learning approach,
Y. Hou, J. Zhao, R. Zhang, X. Cheng, and L. Yang, “Uav swarm cooperative target search: A multi-agent reinforcement learning approach,” IEEE Transactions on Intelligent Vehicles, vol. 9, no. 1, pp. 568–578, 2023
2023
-
[12]
Multi-agent target pursuit using perception uncertainty-aware reinforcement learning,
Y. Cheng, J. Zha, R. Yang et al., “Multi-agent target pursuit using perception uncertainty-aware reinforcement learning,” in Proceedings of the 30th Annual International Conference on Mobile Computing and Networking, 2024, pp. 1992–1997
2024
-
[13]
Deep reinforce- ment learning enabled multi-uav scheduling for disaster data collection with time-varying value,
P. Wan, G. Xu, J. Chen, and Y. Zhou, “Deep reinforce- ment learning enabled multi-uav scheduling for disaster data collection with time-varying value,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 7, pp. 6691– 6702, 2024
2024
-
[14]
Emerging uav technol- ogy for disaster detection, mitigation, response, and prepared- ness,
A. Khan, S. Gupta, and S. K. Gupta, “Emerging uav technol- ogy for disaster detection, mitigation, response, and prepared- ness,” Journal of Field Robotics, vol. 39, no. 6, pp. 905–955, 2022
2022
-
[15]
Uav–ground vehicle collaborative delivery in emergency response: A review of key technologies and future trends,
Y. Wang, J. Li, X. Yang, and Q. Peng, “Uav–ground vehicle collaborative delivery in emergency response: A review of key technologies and future trends,” Applied Sciences, vol. 15, no. 17, p. 9803, 2025
2025
-
[16]
Scalable uav multi-hop networking via multi-agent reinforcement learning with large language models,
Y. Xu, J. Zha, W. Hong, X. Yi, G. Chen, J. Zheng, C.- C. Hsia, and X. Chen, “Scalable uav multi-hop networking via multi-agent reinforcement learning with large language models,” IEEE Transactions on Mobile Computing, 2026
2026
-
[17]
Decentralized cooperative aerial surveillance using fixed-wing miniature uavs,
R. W. Beard, T. W. McLain, D. B. Nelson, D. Kingston, and D. Johanson, “Decentralized cooperative aerial surveillance using fixed-wing miniature uavs,” Proceedings of the IEEE, vol. 94, no. 7, pp. 1306–1324, 2006
2006
-
[18]
Multiple moving targets surveillance based on a cooperative network for multi-uav,
J. Gu, T. Su, Q. Wang, X. Du, and M. Guizani, “Multiple moving targets surveillance based on a cooperative network for multi-uav,” IEEE Communications Magazine, vol. 56, no. 4, pp. 82–89, 2018
2018
-
[19]
Integrated sensing and communication in uav swarms for cooperative multiple targets tracking,
L. Zhou, S. Leng, Q. Wang, and Q. Liu, “Integrated sensing and communication in uav swarms for cooperative multiple targets tracking,” IEEE Transactions on Mobile Computing, vol. 22, no. 11, pp. 6526–6542, 2022
2022
-
[20]
Integrated design of cooperative area coverage and target tracking with multi-uav system,
M. Zhang, X. Wu, J. Li, X. Wang, and L. Shen, “Integrated design of cooperative area coverage and target tracking with multi-uav system,” Journal of Intelligent & Robotic Systems, vol. 108, no. 4, p. 77, 2023
2023
-
[21]
Intelligent uav swarm cooperation for multiple targets tracking,
L. Zhou, S. Leng, Q. Liu, and Q. Wang, “Intelligent uav swarm cooperation for multiple targets tracking,” IEEE Internet of Things Journal, vol. 9, no. 1, pp. 743–754, 2021
2021
-
[22]
Efficient joint deployment of multi-uavs for target tracking in traffic big data,
L. Sun, J. Wang, J. Wang, L. Lin, and M. Gen, “Efficient joint deployment of multi-uavs for target tracking in traffic big data,” IEEE Transactions on Intelligent Transportation Systems, vol. 25, no. 7, pp. 7780–7791, 2024
2024
-
[23]
Smart: Vision- based method of cooperative surveillance and tracking by multiple uavs in the urban environment,
D. Liu, X. Zhu, W. Bao, B. Fei, and J. Wu, “Smart: Vision- based method of cooperative surveillance and tracking by multiple uavs in the urban environment,” IEEE Transactions on Intelligent Transportation Systems, vol. 23, no. 12, pp. 24 941–24 956, 2022
2022
-
[24]
A multi- uav system for detection and elimination of multiple targets,
Y. Stasinchuk, M. Vrba, M. Petrlík, T. Báča, V. Spurnỳ, D. Hert, D. Žaitlík, T. Nascimento, and M. Saska, “A multi- uav system for detection and elimination of multiple targets,” in 2021 IEEE international conference on robotics and automa- tion (ICRA). IEEE, 2021, pp. 555–561
2021
-
[25]
Multi- uav cooperative target consensus detection and trajectory optimization in urban environments,
K. Miao, C. Wang, Y. Niu, H. Yu, and T. Liu, “Multi- uav cooperative target consensus detection and trajectory optimization in urban environments,” IEEE Transactions on Aerospace and Electronic Systems, 2025
2025
-
[26]
Aircopbench: A benchmark for multi-drone collabo- rative embodied perception and reasoning,
J. Zha, Y. Fan, T. Zhang, G. Chen, Y. Chen, C. Gao, and X. Chen, “Aircopbench: A benchmark for multi-drone collabo- rative embodied perception and reasoning,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 40, no. 2, 2026, pp. 1507–1515
2026
-
[27]
A survey on autonomous and intelligent swarms of uncrewed aerial vehicles (uavs),
Z. Du, C. Luo, G. Min, J. Wu, C. Luo, J. Pu, and S. Li, “A survey on autonomous and intelligent swarms of uncrewed aerial vehicles (uavs),” IEEE Transactions on Intelligent Trans- portation Systems, 2025
2025
-
[28]
Communication and control in collaborative uavs: Recent advances and future trends,
S. Javaid, N. Saeed, Z. Qadir, H. Fahim, B. He, H. Song, and M. Bilal, “Communication and control in collaborative uavs: Recent advances and future trends,” IEEE Transactions on Intelligent Transportation Systems, vol. 24, no. 6, pp. 5719– 5739, 2023
2023
-
[29]
Resilient uav swarm with fast connectivity recovery and extensive coverage,
Y. Peng, C. Zhou, H. Cui, T. Duan, H. Chen, F. Zhang, and S. Liu, “Resilient uav swarm with fast connectivity recovery and extensive coverage,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 40, no. 2, 2026, pp. 917–925
2026
-
[30]
Dis- tributed estimation approach for tracking a mobile target via formation of uavs,
M. Doostmohammadian, A. Taghieh, and H. Zarrabi, “Dis- tributed estimation approach for tracking a mobile target via formation of uavs,” IEEE Transactions on Automation Science and Engineering, vol. 19, no. 4, pp. 3765–3776, 2021
2021
-
[31]
Aerial shepherds: Enabling hierarchical localization in heterogeneous mav swarms,
H. Wang, J. Xu, C. Zhao et al., “Aerial shepherds: Enabling hierarchical localization in heterogeneous mav swarms,” arXiv preprint arXiv:2506.08408, 2025
-
[32]
Co- operative dynamic target tracking: Distributed time-varying optimization for multi-uav system,
B. Zhang, Y. Hou, H. Yin, M. Lv, A. Yang, and L. Wu, “Co- operative dynamic target tracking: Distributed time-varying optimization for multi-uav system,” IEEE Transactions on Aerospace and Electronic Systems, 2025
2025
-
[33]
Information weighted consensus filters and their application in distributed camera networks,
A. T. Kamal et al., “Information weighted consensus filters and their application in distributed camera networks,” IEEE 14 Transactions on Automatic Control, vol. 58, no. 12, pp. 3112– 3125, 2013
2013
-
[34]
Learning efficient multi-agent communication: An informa- tion bottleneck approach,
R. Wang, X. He, R. Yu, W. Qiu, B. An, and Z. Rabinovich, “Learning efficient multi-agent communication: An informa- tion bottleneck approach,” in International conference on machine learning. PMLR, 2020, pp. 9908–9918
2020
-
[35]
Communica- tion efficiency in multi-agent systems,
M. Berna-Koes, I. Nourbakhsh, and K. Sycara, “Communica- tion efficiency in multi-agent systems,” in IEEE International Conference on Robotics and Automation, 2004. Proceedings. ICRA’04. 2004, vol. 3. IEEE, 2004, pp. 2129–2134
2004
-
[36]
Optimal spatial–temporal triangulation for bearing-only co- operative motion estimation,
C. Zheng, Y. Mi, H. Guo, H. Chen, Z. Lin, and S. Zhao, “Optimal spatial–temporal triangulation for bearing-only co- operative motion estimation,” Automatica, vol. 175, p. 112216, 2025
2025
-
[37]
Event-triggered extended Kalman filtering analysis for networked systems,
H. Zhao et al., “Event-triggered extended Kalman filtering analysis for networked systems,” Mathematics, vol. 10, no. 6, p. 927, 2022
2022
-
[38]
Event-triggered cooperative unscented Kalman filtering and its application in multi-UA V systems,
W. Song, J. Wang, S. Zhao, and J. Shan, “Event-triggered cooperative unscented Kalman filtering and its application in multi-UA V systems,” Automatica, vol. 105, pp. 264–273, 2019
2019
-
[39]
Application of event-triggered cubature Kalman filter for remote nonlinear state estimation in wireless sensor network,
S. Li, Z. Li, J. Li et al., “Application of event-triggered cubature Kalman filter for remote nonlinear state estimation in wireless sensor network,” IEEE Transactions on Industrial Electronics, vol. 68, no. 6, pp. 5133–5145, 2020
2020
-
[40]
A survey on recent advances in event-triggered communication and control,
C. Peng et al., “A survey on recent advances in event-triggered communication and control,” Information Sciences, vol. 457, pp. 113–125, 2018
2018
-
[41]
Reaching a consensus,
M. H. DeGroot, “Reaching a consensus,” Journal of the American Statistical Association, vol. 69, no. 345, pp. 118– 121, 1974
1974
-
[42]
Event-triggered resilient distributed ex- tended Kalman filter with consensus on estimation,
H. Rezaei et al., “Event-triggered resilient distributed ex- tended Kalman filter with consensus on estimation,” Inter- national Journal of Robust and Nonlinear Control, vol. 32, no. 3, pp. 1303–1315, 2022
2022
-
[43]
Stochastic event-triggered sensor schedule for remote state estimation,
D. Han, Y. Mo et al., “Stochastic event-triggered sensor schedule for remote state estimation,” IEEE Transactions on Automatic Control, vol. 60, no. 10, pp. 2661–2675, 2015
2015
-
[44]
Send-on-delta concept: An event-based data reporting strategy,
M. Miskowicz, “Send-on-delta concept: An event-based data reporting strategy,” Sensors, vol. 6, no. 1, pp. 49–63, 2006
2006
-
[45]
Consensus of linear multi- agent systems by distributed event-triggered strategy,
W. Hu, L. Liu, and G. Feng, “Consensus of linear multi- agent systems by distributed event-triggered strategy,” IEEE Transactions on Cybernetics, vol. 46, no. 1, pp. 148–157, 2015
2015
-
[46]
Dynamic event- triggered control and estimation: A survey,
X. Ge, Q.-L. Han, X.-M. Zhang, and D. Ding, “Dynamic event- triggered control and estimation: A survey,” International Journal of Automation and Computing, vol. 18, no. 6, pp. 857–886, 2021
2021
-
[47]
Distributed auxiliary particle filtering with diffusion strategy for target tracking: A dynamic event-triggered approach,
W. Song, Z. Wang et al., “Distributed auxiliary particle filtering with diffusion strategy for target tracking: A dynamic event-triggered approach,” IEEE Transactions on Signal Pro- cessing, vol. 69, pp. 328–340, 2020
2020
-
[48]
Distributed Kalman consensus filter with event-triggered communication: Formulation and stabil- ity analysis,
C. Zhang and Y. Jia, “Distributed Kalman consensus filter with event-triggered communication: Formulation and stabil- ity analysis,” Journal of the Franklin Institute, vol. 354, no. 13, pp. 5486–5502, 2017
2017
-
[49]
Event-triggered Kalman consensus filter over sensor networks,
W. Li, Y. Jia, and J. Du, “Event-triggered Kalman consensus filter over sensor networks,” IET Control Theory & Applica- tions, vol. 10, no. 1, pp. 103–110, 2016
2016
-
[50]
Event camera meets mobile embodied perception: abstraction, algorithm, acceleration, ap- plication,
H. Wang, R. Guo, P. Ma, C. Ruan, X. Luo, W. Ding, T. Zhong, J. Xu, Y. Liu, and X. Chen, “Event camera meets mobile embodied perception: abstraction, algorithm, acceleration, ap- plication,” ACM Computing Surveys, vol. 58, no. 8, pp. 1–41, 2026
2026
-
[51]
Ultra-high-frequency harmony: mmwave radar and event camera orchestrate accurate drone landing,
H. Wang, J. Xu, X. Luo, X. Chen, T. Zhang, R. Duan, Y. Liu, and X. Chen, “Ultra-high-frequency harmony: mmwave radar and event camera orchestrate accurate drone landing,” in Proceedings of the 23rd ACM Conference on Embedded Networked Sensor Systems, 2025, pp. 15–29
2025
-
[52]
A distributed Kalman filter with event-triggered communication and guaranteed stability,
G. Battistelli, L. Chisci, and D. Selvi, “A distributed Kalman filter with event-triggered communication and guaranteed stability,” Automatica, vol. 93, pp. 75–82, 2018
2018
-
[53]
Distributed event- triggered cubature information filtering based on weighted average consensus,
Q. Tan, X. Dong, Q. Li, and Z. Ren, “Distributed event- triggered cubature information filtering based on weighted average consensus,” IET Control Theory & Applications, vol. 12, no. 1, pp. 78–86, 2018
2018
-
[54]
Distributed cubature information fil- tering based on hybrid consensus strategy with event-triggered mechanism,
X. Lin, X. Zhang et al., “Distributed cubature information fil- tering based on hybrid consensus strategy with event-triggered mechanism,” in 2022 13th Asian Control Conference (ASCC), 2022, pp. 2138–2143
2022
-
[55]
Privacy-preserving push-sum distributed cubature information filter for nonlinear target tracking with switching directed topologies,
J. Zha, L. Han, X. Dong et al., “Privacy-preserving push-sum distributed cubature information filter for nonlinear target tracking with switching directed topologies,” ISA Transac- tions, vol. 136, pp. 16–30, 2023
2023
-
[56]
Distributed estima- tion in large wireless sensor networks via a locally optimum approach,
S. Marano, V. Matta, and P. Willett, “Distributed estima- tion in large wireless sensor networks via a locally optimum approach,” IEEE Transactions on Signal Processing, vol. 56, no. 2, pp. 748–756, 2008
2008
-
[57]
Quantizer precision for dis- tributed estimation in a large sensor network,
S. Marano, V. Matta et al., “Quantizer precision for dis- tributed estimation in a large sensor network,” IEEE Trans- actions on Signal Processing, vol. 54, no. 10, pp. 4073–4078, 2006
2006
-
[58]
Diffusion strategies for dis- tributed Kalman filtering and smoothing,
F. S. Cattivelli and A. H. Sayed, “Diffusion strategies for dis- tributed Kalman filtering and smoothing,” IEEE Transactions on Automatic Control, vol. 55, no. 9, pp. 2069–2084, 2010
2069
-
[59]
Event-triggered diffu- sion nonlinear estimation for sensor networks with unknown cross-correlations,
Y. Liang, Y. Li, Y. Chen, and A. Sheng, “Event-triggered diffu- sion nonlinear estimation for sensor networks with unknown cross-correlations,” Systems & Control Letters, vol. 175, p. 105506, 2023
2023
-
[60]
Diffusion strategies outperform consensus strategies for distributed estimation over adaptive networks,
S.-Y. Tu et al., “Diffusion strategies outperform consensus strategies for distributed estimation over adaptive networks,” IEEE Transactions on Signal Processing, vol. 60, no. 12, pp. 6217–6234, 2012
2012
-
[61]
Partial diffusion Kalman filtering for distributed state estimation in multiagent net- works,
V. Vahidpour, A. Rastegarnia et al., “Partial diffusion Kalman filtering for distributed state estimation in multiagent net- works,” IEEE Transactions on Neural Networks and Learning Systems, vol. 30, no. 12, pp. 3839–3846, 2019
2019
-
[62]
Distributed nonlinear Kalman filtering with applications to wireless localization,
F. S. Cattivelli and A. H. Sayed, “Distributed nonlinear Kalman filtering with applications to wireless localization,” in 2010 IEEE International Conference on Acoustics, Speech and Signal Processing, 2010, pp. 3522–3525
2010
-
[63]
Distributed diffusion unscented Kalman filtering based on covariance intersection with intermittent measurements,
H. Chen, J. Wang, C. Wang, J. Shan, and M. Xin, “Distributed diffusion unscented Kalman filtering based on covariance intersection with intermittent measurements,” Automatica, vol. 132, p. 109769, 2021
2021
-
[64]
A non-divergent estimation algorithm in the presence of unknown correlations,
S. J. Julier and J. K. Uhlmann, “A non-divergent estimation algorithm in the presence of unknown correlations,” in Pro- ceedings of the 1997 American Control Conference, vol. 4, 1997, pp. 2369–2373
1997
-
[65]
Robust integrated sequential covariance intersection fusion Kalman filters and their convergence and stability for networked sensor systems with five uncertainties,
Y. Gao and Z. Deng, “Robust integrated sequential covariance intersection fusion Kalman filters and their convergence and stability for networked sensor systems with five uncertainties,” International Journal of Robust and Nonlinear Control, vol. 33, no. 2, pp. 1371–1406, 2023
2023
-
[66]
Inverse-covariance-intersection-based dis- tributed estimation and application in wireless sensor net- work,
T. Sun et al., “Inverse-covariance-intersection-based dis- tributed estimation and application in wireless sensor net- work,” IEEE Transactions on Industrial Informatics, vol. 19, no. 10, pp. 10 079–10 090, 2023
2023
-
[67]
Diffusion Kalman filtering based on covariance intersection,
J. Hu, L. Xie, and C. Zhang, “Diffusion Kalman filtering based on covariance intersection,” IEEE Transactions on Signal Processing, vol. 60, no. 2, pp. 891–902, 2011
2011
-
[68]
Distributed resilient fusion filtering for nonlinear systems with multiple missing measurements via dynamic event-triggered mechanism,
J. Hu, Z. Hu et al., “Distributed resilient fusion filtering for nonlinear systems with multiple missing measurements via dynamic event-triggered mechanism,” Information Sciences, vol. 637, p. 118950, 2023
2023
-
[69]
Dimm: Decoupled multi-hierarchy kalman filter via reinforcement learning,
J. Zha, Y. Fan, K. Li, H. Li, C. Gao, and X. Chen, “Dimm: Decoupled multi-hierarchy kalman filter via reinforcement learning,” in Proceedings of the AAAI Conference on Artificial Intelligence, vol. 40, no. 22, 2026, pp. 18 746–18 754
2026
-
[70]
Cubature Kalman filters,
I. Arasaratnam et al., “Cubature Kalman filters,” IEEE Transactions on Automatic Control, vol. 54, no. 6, pp. 1254– 1269, 2009
2009
-
[71]
Cuba- ture information filter and its applications,
K. Pakki, B. Chandra, D.-W. Gu, and I. Postlethwaite, “Cuba- ture information filter and its applications,” in Proceedings of the 2011 American Control Conference, 2011, pp. 3609–3614
2011
-
[72]
Weighted average consensus-based cubature Kalman filtering for mobile sensor networks with switching topologies,
Q. Tan, X. Dong, Q. Li, and Z. Ren, “Weighted average consensus-based cubature Kalman filtering for mobile sensor networks with switching topologies,” in 2017 13th IEEE International Conference on Control & Automation (ICCA), 2017, pp. 271–276
2017
-
[73]
Diffusion nonlinear kalman filter with intermittent observations,
G. Wang, N. Li, and Y. Zhang, “Diffusion nonlinear kalman filter with intermittent observations,” Proceedings of the Insti- tution of Mechanical Engineers, Part G: Journal of Aerospace Engineering, vol. 232, no. 15, pp. 2775–2783, 2018. 15
2018
-
[74]
Distributed kalman filtering for sensor net- works,
R. Olfati-Saber, “Distributed kalman filtering for sensor net- works,” in 2007 46th IEEE conference on decision and control. IEEE, 2007, pp. 5492–5498
2007
-
[75]
Multi-drone-based single object tracking with agent sharing network,
P. Zhu, J. Zheng, D. Du, L. Wen, Y. Sun, and Q. Hu, “Multi-drone-based single object tracking with agent sharing network,” IEEE Transactions on Circuits and Systems for Video Technology, vol. 31, no. 10, pp. 4058–4070, 2020
2020
-
[76]
Re- silient unscented kalman filtering fusion with dynamic event- triggered scheme: Applications to multiple unmanned aerial vehicles,
C. Li, Z. Wang, W. Song, S. Zhao, J. Wang, and J. Shan, “Re- silient unscented kalman filtering fusion with dynamic event- triggered scheme: Applications to multiple unmanned aerial vehicles,” IEEE Transactions on Control Systems Technology, vol. 31, no. 1, pp. 370–381, 2022
2022
-
[77]
Ucdnet: Multi-uav collabora- tive 3-d object detection network by reliable feature mapping,
P. Tian, Z. Wang, P. Cheng, Y. Wang, Z. Wang, L. Zhao, M. Yan, X. Yang, and X. Sun, “Ucdnet: Multi-uav collabora- tive 3-d object detection network by reliable feature mapping,” IEEE Transactions on Geoscience and Remote Sensing, vol. 63, pp. 1–16, 2024
2024
-
[78]
Where2comm: Communication-efficient collaborative perception via spatial confidence maps,
Y. Hu, S. Fang, Z. Lei, Y. Zhong, and S. Chen, “Where2comm: Communication-efficient collaborative perception via spatial confidence maps,” Advances in neural information processing systems, vol. 35, pp. 4874–4886, 2022
2022
-
[79]
A benchmark for the evaluation of RGB-D SLAM systems,
J. Sturm, N. Engelhard et al., “A benchmark for the evaluation of RGB-D SLAM systems,” in 2012 IEEE/RSJ International Conference on Intelligent Robots and Systems. IEEE, 2012, pp. 573–580
2012
-
[80]
EVO: Python package for the evaluation of odometry and SLAM,
M. Grupp, “EVO: Python package for the evaluation of odometry and SLAM,” 2017. Jirong Zha is currently pursuing her Ph.D. degree in data science and information tech- nology from Tsinghua University, China. She received the M.S. and B.S. degrees from Bei- hang University, China, in 2023 and 2020, re- spectively. Her research interests include col- laborat...
2017
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.