Recognition: unknown
Differentiable Multiphysics Co-Optimization via Implicit Neural Representations: A Transient Hamburger-Cooking Benchmark
Pith reviewed 2026-05-09 17:49 UTC · model grok-4.3
The pith
Coupling implicit neural geometry to a differentiable Eulerian solver enables end-to-end co-optimization of shape, material state, and process variables across full transient multiphysics rollouts.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
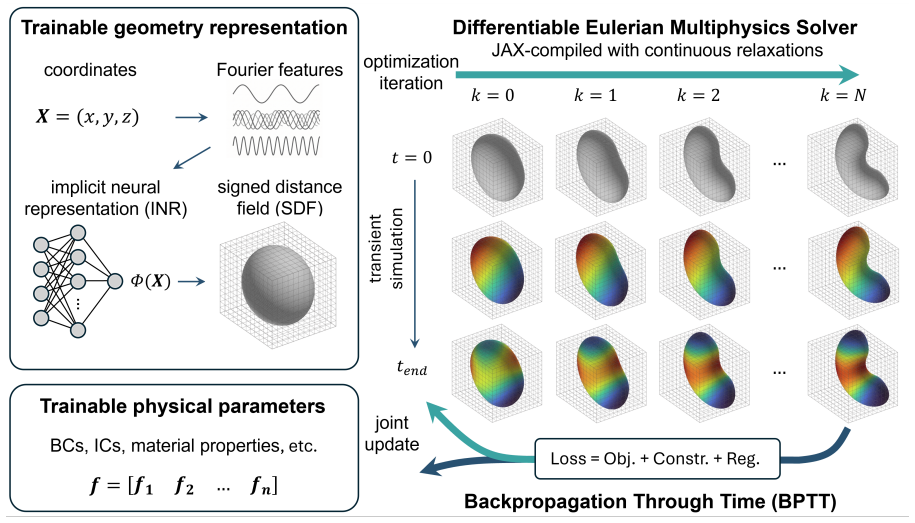
An end-to-end differentiable co-optimization framework is created by representing geometry via Fourier-feature-encoded implicit neural signed distance fields and coupling it to a JAX-compiled Eulerian multiphysics solver. Boundary conditions, initial conditions, process controls, and material parameters are optimized inside the same loop, with continuous relaxations preserving differentiability for reverse-mode automatic differentiation and backpropagation through time. The framework is demonstrated on a transient hamburger-cooking benchmark that incorporates conductive and convective heat transfer, latent energy, moisture and fat transport, shrinkage-induced geometry evolution, evolving and
What carries the argument
Implicit neural representation of geometry as a signed distance field using Fourier feature encoding, coupled to a JAX-compiled Eulerian multiphysics solver with continuous relaxations for non-smooth transitions.
If this is right
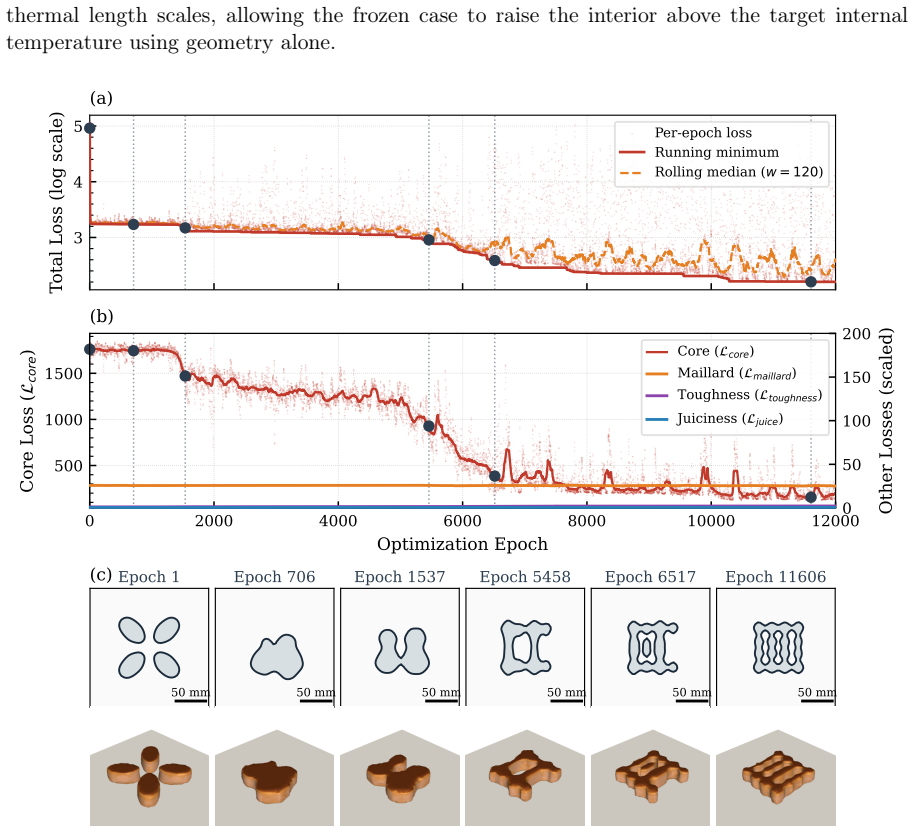
- Geometry-only optimization produces shapes that reduce thermal bottlenecks even when other parameters stay fixed.
- Joint optimization distributes design changes across geometry, material properties, process variables, and boundary conditions through gradients from the full transient simulation.
- The same differentiable loop can handle moving boundaries and evolving contact conditions without requiring separate geometry updates.
- Competing objectives in multiphysics problems become simultaneously addressable because gradients propagate across the entire time history.
Where Pith is reading between the lines
- The approach could be applied to other transient systems with moving interfaces, such as additive manufacturing or fluid-structure interaction, where geometry and physics must be tuned together.
- It opens the possibility of incorporating real-time sensor data into the optimization loop for adaptive process control.
- Extension to three-dimensional problems with more complex contact and phase-change physics would test whether the relaxation scheme scales without introducing new artifacts.
Load-bearing premise
Continuous relaxations can represent non-smooth physical transitions such as phase changes and contact events without losing accuracy or differentiability.
What would settle it
A direct numerical comparison in which the jointly co-optimized design achieves no measurable improvement in the benchmark quality objectives over independently optimized geometry plus parameters, or in which the continuous relaxations produce simulation errors larger than the observed design gains.
Figures



read the original abstract
The co-optimization of geometry and physical parameters remains challenging in transient multiphysics systems involving moving boundaries, nonlinear material response, phase transitions, and competing objectives. Existing methods often optimize geometry and physical variables separately, rely on simplified steady-state physics, or require offline data generation and reduced design spaces. Here, we present an end-to-end differentiable co-optimization framework that couples an implicit neural representation of geometry with a JAX-compiled Eulerian multiphysics solver. Geometry is represented as a signed distance field using Fourier-feature-encoded spatial coordinates, while boundary conditions, initial conditions, process controls, and material parameters are optimized within the same differentiable loop. Continuous relaxations represent non-smooth physical transitions while preserving compatibility with reverse-mode automatic differentiation and backpropagation through time. We demonstrate the framework using a transient hamburger-cooking benchmark, selected as an interpretable multiphysics problem rather than a culinary optimization exercise. The benchmark combines conductive and convective heat transfer, latent energy effects, moisture and fat transport, shrinkage-induced geometry evolution, evolving contact boundary conditions, flipping-induced boundary-condition changes, and competing quality objectives. Results show that geometry-only optimization modifies shape to relieve thermal bottlenecks, while joint co-optimization distributes the design response across geometry, material state, process variables, and boundary conditions through gradients propagated over the full transient rollout.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an end-to-end differentiable co-optimization framework coupling an implicit neural representation (Fourier-feature-encoded signed distance field) of geometry with a JAX-compiled Eulerian multiphysics solver. Boundary conditions, initial conditions, process controls, and material parameters are optimized jointly in the same loop. Continuous relaxations are used for non-smooth transitions (latent heat, moisture/fat transport, contact boundaries, shrinkage, flipping) to maintain reverse-mode AD and backpropagation-through-time compatibility. The approach is demonstrated on a transient hamburger-cooking benchmark combining conductive/convective heat transfer, phase changes, transport, evolving geometry, and competing quality objectives. Results indicate that geometry-only optimization relieves thermal bottlenecks via shape changes, while joint co-optimization distributes the design response across geometry, material state, process variables, and boundary conditions.
Significance. If the physical fidelity of the relaxations and the quantitative effectiveness of the co-optimization are established, the framework could enable more comprehensive design exploration in transient multiphysics problems with moving boundaries and nonlinear responses. The combination of implicit neural geometry representations with compiled differentiable solvers offers a scalable route to gradient-based co-optimization that avoids separate offline data generation or reduced design spaces.
major comments (2)
- [Abstract] Abstract: The central claims about the effectiveness of geometry-only versus joint co-optimization are supported only by qualitative descriptions (e.g., 'modifies shape to relieve thermal bottlenecks' and 'distributes the design response across geometry, material state, process variables, and boundary conditions'). No quantitative metrics, objective-function values, error bars, baseline comparisons, or sensitivity studies are reported, which is load-bearing for assessing whether the gradients over the full transient rollout produce meaningful improvements.
- [Method (continuous relaxations)] Continuous-relaxations description (method section): The continuous relaxations for non-smooth physical transitions (latent energy, contact boundaries, shrinkage-induced geometry evolution, flipping) are introduced specifically to preserve compatibility with reverse-mode automatic differentiation. However, no verification is provided against sharp-interface limits, discrete conservation checks, or sensitivity to relaxation width in the Eulerian JAX solver. In a benchmark with multiple coupled non-smooth events, this directly affects whether the propagated gradients yield physically meaningful co-optimized designs or artifacts exploitable by the optimizer.
minor comments (1)
- [Abstract] The abstract states the benchmark is 'selected as an interpretable multiphysics problem rather than a culinary optimization exercise'; this framing is clear but could be moved to the introduction for a more formal tone.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on our manuscript. We address each major comment below and outline the revisions we will make to strengthen the quantitative support and validation of the proposed framework.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claims about the effectiveness of geometry-only versus joint co-optimization are supported only by qualitative descriptions (e.g., 'modifies shape to relieve thermal bottlenecks' and 'distributes the design response across geometry, material state, process variables, and boundary conditions'). No quantitative metrics, objective-function values, error bars, baseline comparisons, or sensitivity studies are reported, which is load-bearing for assessing whether the gradients over the full transient rollout produce meaningful improvements.
Authors: We agree that the current abstract and results presentation rely on qualitative descriptions of the optimization outcomes. In the revised manuscript we will augment the abstract and add a dedicated quantitative results subsection that reports objective-function values for the geometry-only and joint co-optimization cases, direct numerical comparisons against the baseline (unoptimized) configuration, error bars obtained from repeated optimization runs with different random seeds, and a brief sensitivity study on key hyperparameters. These additions will allow readers to evaluate the magnitude and statistical reliability of the reported improvements. revision: yes
-
Referee: [Method (continuous relaxations)] Continuous-relaxations description (method section): The continuous relaxations for non-smooth physical transitions (latent energy, contact boundaries, shrinkage-induced geometry evolution, flipping) are introduced specifically to preserve compatibility with reverse-mode automatic differentiation. However, no verification is provided against sharp-interface limits, discrete conservation checks, or sensitivity to relaxation width in the Eulerian JAX solver. In a benchmark with multiple coupled non-smooth events, this directly affects whether the propagated gradients yield physically meaningful co-optimized designs or artifacts exploitable by the optimizer.
Authors: We acknowledge that explicit verification of the continuous relaxations was omitted from the original submission. In the revised version we will add a new subsection (or appendix) that (i) compares the relaxed model against the corresponding sharp-interface formulation on a simplified 1-D test problem for both energy conservation and interface motion, (ii) reports global discrete conservation errors for mass and energy over the full transient rollout, and (iii) presents a sensitivity study varying the relaxation width parameter while monitoring both the final objective value and the gradient norms. These checks will demonstrate that the chosen relaxation widths produce gradients that remain consistent with the sharp-interface limit within acceptable engineering tolerances. revision: yes
Circularity Check
No circularity: optimization outputs are produced by gradient descent, not tautological to inputs
full rationale
The paper describes an end-to-end differentiable co-optimization loop coupling an implicit neural representation (SDF via Fourier features) with a JAX Eulerian multiphysics solver. Geometry, material parameters, boundary conditions, and process variables are treated as free design variables updated via backpropagation through the full transient rollout. Continuous relaxations are introduced explicitly to enable reverse-mode AD, but the reported optima (shape changes relieving thermal bottlenecks, joint distribution of design response) are outputs of the numerical optimization, not quantities defined to equal the inputs by construction. No self-citation chain, uniqueness theorem, or fitted-parameter-renamed-as-prediction appears in the provided text. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Continuous relaxations can represent non-smooth physical transitions while preserving compatibility with reverse-mode automatic differentiation and backpropagation through time
Reference graph
Works this paper leans on
-
[1]
Springer, Berlin, Heidelberg, 2 edition, 2004
Martin Philip Bendsøe and Ole Sigmund.Topology Optimization: Theory, Methods, and Applications. Springer, Berlin, Heidelberg, 2 edition, 2004
2004
-
[2]
Structural optimization using sensitivity analysis and a level-set method.Journal of Computational Physics, 194(1):363– 393, 2004
Grégoire Allaire, François Jouve, and Anca-Maria Toader. Structural optimization using sensitivity analysis and a level-set method.Journal of Computational Physics, 194(1):363– 393, 2004
2004
-
[3]
Giles and Niles A
Michael B. Giles and Niles A. Pierce. An introduction to the adjoint approach to design. Flow, Turbulence and Combustion, 65(3–4):393–415, 2000
2000
-
[4]
A review of topology optimisation for fluid-based problems.Fluids, 5(1):29, 2020
Joe Alexandersen and Casper Schousboe Andreasen. A review of topology optimisation for fluid-based problems.Fluids, 5(1):29, 2020
2020
-
[5]
Yupeng Sun, Song Yao, and Joe Alexandersen. Topography optimisation using a reduced- dimensional model for transient conjugate heat transfer between fluid channels and solid plates with volumetric heat source.Structural and Multidisciplinary Optimization, 67(4):45, 2024
2024
-
[6]
Aeroacoustic and aerodynamic adjoint-based shape optimization of an axisymmetric aero-engine intake.Aerospace, 10(9):743, 2023
Morteza Monfaredi, Varvara Asouti, Xenofon Trompoukis, Konstantinos Tsiakas, and Kyr- iakos Giannakoglou. Aeroacoustic and aerodynamic adjoint-based shape optimization of an axisymmetric aero-engine intake.Aerospace, 10(9):743, 2023
2023
-
[7]
Conceptual design of supersonic Busemann biplane based on neighborhood-search aerodynamic topology.Physics of Fluids, 37(3):031702, 2025
Peng Liao, Peng Bai, Yudong Zhang, and Chuanzhen Liu. Conceptual design of supersonic Busemann biplane based on neighborhood-search aerodynamic topology.Physics of Fluids, 37(3):031702, 2025
2025
-
[8]
Topology optimization of stationary fluid–structure interaction prob- lems considering a natural frequency constraint for vortex-induced vibrations attenuation
Lucas Oliveira Siqueira, Kamilla Emily Santos Silva, Emílio Carlos Nelli Silva, and Re- nato Picelli Sanches. Topology optimization of stationary fluid–structure interaction prob- lems considering a natural frequency constraint for vortex-induced vibrations attenuation. Finite Elements in Analysis and Design, 234:104137, 2024
2024
-
[9]
Topology optimization of fluid–structure interaction problems with buckling constraints
Qingdi Wang, Lucas Oliveira Siqueira, Tao Xu, Min Zhao, Renato Picelli, and Yi Min Xie. Topology optimization of fluid–structure interaction problems with buckling constraints. Computers & Structures, 318:107978, 2025
2025
-
[10]
M. J. B. Theulings, R. Maas, Lisa Noël, Fred van Keulen, and Matthijs Langelaar. Reducing time and memory requirements in topology optimization of transient problems.Interna- tional Journal for Numerical Methods in Engineering, 125(14):e7461, 2024
2024
-
[11]
Recent advances in bayesian optimization.ACM Computing Surveys, 55(13s):1–36, 2023
Xilu Wang, Yaochu Jin, Sebastian Schmitt, and Markus Olhofer. Recent advances in bayesian optimization.ACM Computing Surveys, 55(13s):1–36, 2023
2023
-
[12]
Surrogate-based optimization techniques for process systems engineer- ing
Mathias Neufang, Emma Pajak, Damien van de Berg, Ye Seol Lee, and Ehecatl Antonio Del Rio Chanona. Surrogate-based optimization techniques for process systems engineer- ing. In Fernando Israel Gómez-Castro and Vicente Rico-Ramírez, editors,Optimization in 16 Chemical Engineering: Deterministic, Meta-Heuristic and Data-Driven Techniques, pages 159–214. De ...
2025
-
[13]
Efficient analy- sis of composites manufacturing using multi-fidelity simulation and probabilistic machine learning.Composites Part B: Engineering, 280:111499, 2024
Caleb Schoenholz, Enrico Zappino, Marco Petrolo, and Navid Zobeiry. Efficient analy- sis of composites manufacturing using multi-fidelity simulation and probabilistic machine learning.Composites Part B: Engineering, 280:111499, 2024
2024
-
[14]
Huilong Fu and Navid Zobeiry. Data-driven machine learning meta-analysis of process– property relationships in polymer additive manufacturing: A case study on FFF-printed PEEK.Journal of Manufacturing Processes, 163:100–113, 2026
2026
-
[15]
NTopo: Mesh-free topology optimization using implicit neural representations
Jonas Zehnder, Yue Li, Stelian Coros, and Bernhard Thomaszewski. NTopo: Mesh-free topology optimization using implicit neural representations. InAdvances in Neural Infor- mation Processing Systems, volume 34, pages 10368–10381, 2021
2021
-
[16]
A review of graph neural network applications in mechanics-related domains.Artificial Intelligence Review, 57:315, 2024
Yingxue Zhao, Haoran Li, Haosu Zhou, Hamid Reza Attar, Tobias Pfaff, and Nan Li. A review of graph neural network applications in mechanics-related domains.Artificial Intelligence Review, 57:315, 2024
2024
-
[17]
Mesh-based GNN surrogates for time-independent PDEs.Scientific Reports, 14(1):3394, 2024
Rini Jasmine Gladstone, Helia Rahmani, Vishvas Suryakumar, Hadi Meidani, Marta D’Elia, and Ahmad Zareei. Mesh-based GNN surrogates for time-independent PDEs.Scientific Reports, 14(1):3394, 2024
2024
-
[18]
Agraphneuralnetworksurrogate model for multi-objective fluid-acoustic shape optimization.Computer Methods in Applied Mechanics and Engineering, 441:117921, 2025
FarnooshHadizadeh, WrikMallik, andRajeevK.Jaiman. Agraphneuralnetworksurrogate model for multi-objective fluid-acoustic shape optimization.Computer Methods in Applied Mechanics and Engineering, 441:117921, 2025
2025
-
[19]
MORPH: Design co-optimization with reinforcement learning via a differentiable hardware model proxy
Zhanpeng He and Matei Ciocarlie. MORPH: Design co-optimization with reinforcement learning via a differentiable hardware model proxy. InProceedings of the IEEE International Conference on Robotics and Automation, pages 7764–7771, 2024
2024
-
[20]
Co-designing hardware and control for robot hands.Science Robotics, 6(54):eabg2133, 2021
Tianjian Chen, Zhanpeng He, and Matei Ciocarlie. Co-designing hardware and control for robot hands.Science Robotics, 6(54):eabg2133, 2021
2021
-
[21]
Maziar Raissi, Paris Perdikaris, and George Em Karniadakis. Physics-informed neural networks: A deep learning framework for solving forward and inverse problems involving nonlinear partial differential equations.Journal of Computational Physics, 378:686–707, 2019
2019
-
[22]
Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang
George Em Karniadakis, Ioannis G. Kevrekidis, Lu Lu, Paris Perdikaris, Sifan Wang, and Liu Yang. Physics-informed machine learning.Nature Reviews Physics, 3(6):422–440, 2021
2021
-
[23]
Navid Zobeiry and Keith D. Humfeld. A physics-informed machine learning approach for solving heat transfer equation in advanced manufacturing and engineering applications. Engineering Applications of Artificial Intelligence, 101:104232, 2021
2021
-
[24]
Review of physics-informed neural networks: Challenges in loss function design and geometric integration.Mathematics, 13(20):3289, 2025
Sergiy Plankovskyy, Yevgen Tsegelnyk, Nataliia Shyshko, Igor Litvinchev, Tetyana Ro- manova, and José Manuel Velarde Cantú. Review of physics-informed neural networks: Challenges in loss function design and geometric integration.Mathematics, 13(20):3289, 2025
2025
-
[25]
DiffTaichi: Differentiable programming for physical simulation
Yuanming Hu, Luke Anderson, Tzu-Mao Li, Qi Sun, Nathan Carr, Jonathan Ragan-Kelley, and Frédo Durand. DiffTaichi: Differentiable programming for physical simulation. In International Conference on Learning Representations, 2020
2020
-
[26]
A review of differentiable simulators.IEEE Access, 12:97581–97604, 2024
Rhys Newbury, Jack Collins, Kerry He, Jiahe Pan, Ingmar Posner, David Howard, and Akansel Cosgun. A review of differentiable simulators.IEEE Access, 12:97581–97604, 2024. 17
2024
-
[27]
Schoenholz and Ekin D
Samuel S. Schoenholz and Ekin D. Cubuk. JAX, MD: A framework for differentiable physics. InAdvances in Neural Information Processing Systems, volume 33, pages 11428– 11441, 2020
2020
-
[28]
JAX-FEM: A differentiable GPU-accelerated 3d finite element solver for automatic inverse design and mechanistic data science.Computer Physics Communications, 291:108802, 2023
Tianju Xue, Shuheng Liao, Zhengtao Gan, Chanwook Park, Xiaoyu Xie, Wing Kam Liu, and Jian Cao. JAX-FEM: A differentiable GPU-accelerated 3d finite element solver for automatic inverse design and mechanistic data science.Computer Physics Communications, 291:108802, 2023
2023
-
[29]
Gernaey, and Jens Adler-Nissen
Aberham Hailu Feyissa, Krist V. Gernaey, and Jens Adler-Nissen. 3d modelling of coupled mass and heat transfer of a convection-oven roasting process.Meat Science, 93(4):810–820, 2013
2013
-
[30]
Multiphaseandmulticomponenttransport with phase change during meat cooking.Journal of Food Engineering, 113:299–309, 2012
AshishDhall, AmitHalder, andAshimK.Datta. Multiphaseandmulticomponenttransport with phase change during meat cooking.Journal of Food Engineering, 113:299–309, 2012. 18 Appendix A Benchmark Assumptions A.1 Initial Composition The hamburger is initialized as a three-phase mixture of water, fat, and protein. The initial fat fractionf 0 f is prescribed or opt...
2012
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.