Recognition: unknown
Dimple-Encoded Reprogrammable Origami
Pith reviewed 2026-05-09 17:41 UTC · model grok-4.3
The pith
Bistable dimples in a continuous elastic sheet create programmable hinges for multiple origami shapes from one structure.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
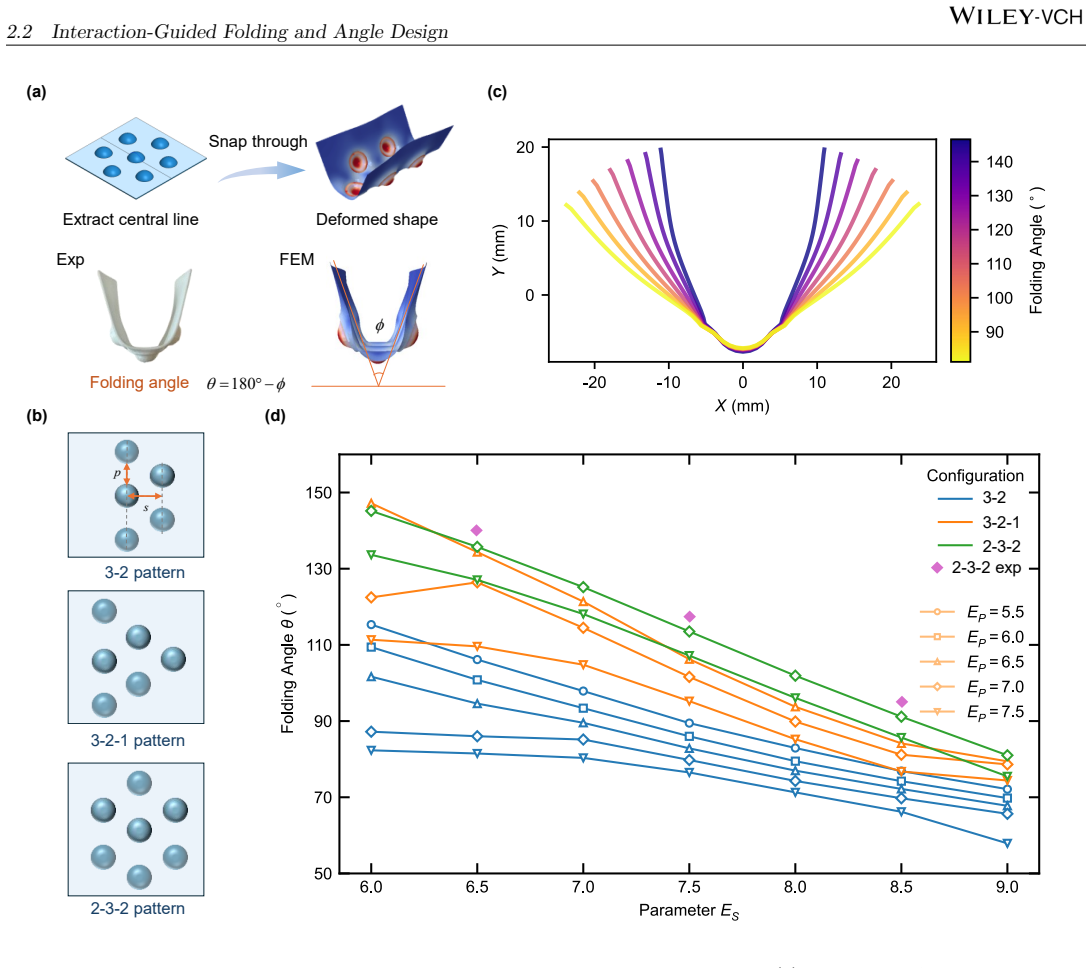
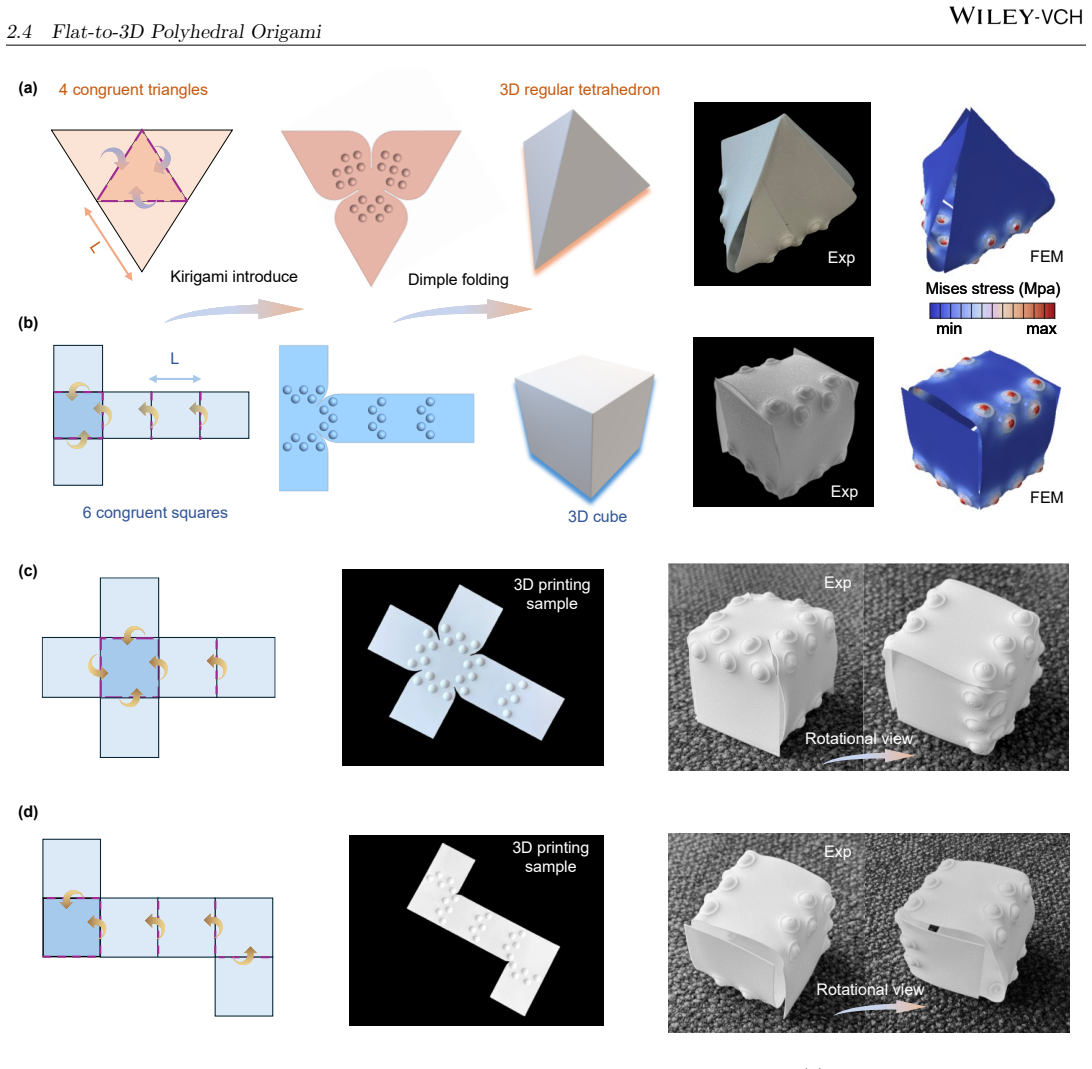
This interaction-enabled mechanism enables the design of distributed hinge networks through the arrangement and selective inversion of dimples. We establish folding-angle design charts that can be directly used to select local dimple arrangements for target fold angle, forming a practical hinge library without altering the underlying unit geometry. Using this approach, a single dimpled sheet can be reprogrammed to realize multiple distinct configurations, such as triangle, square, and pentagon shapes. We further extend the method to flat-to-3D morphing of polyhedral origami and validate the results through experiments and finite element simulations.
What carries the argument
The interaction-enabled mechanism converting bistable dimple snapping into spatially addressable hinges with prescribed angles via selective inversion and local arrangements.
If this is right
- A single dimpled sheet realizes multiple distinct configurations such as triangle, square, and pentagon shapes.
- The method extends to flat-to-3D morphing of polyhedral origami with validation through experiments and simulations.
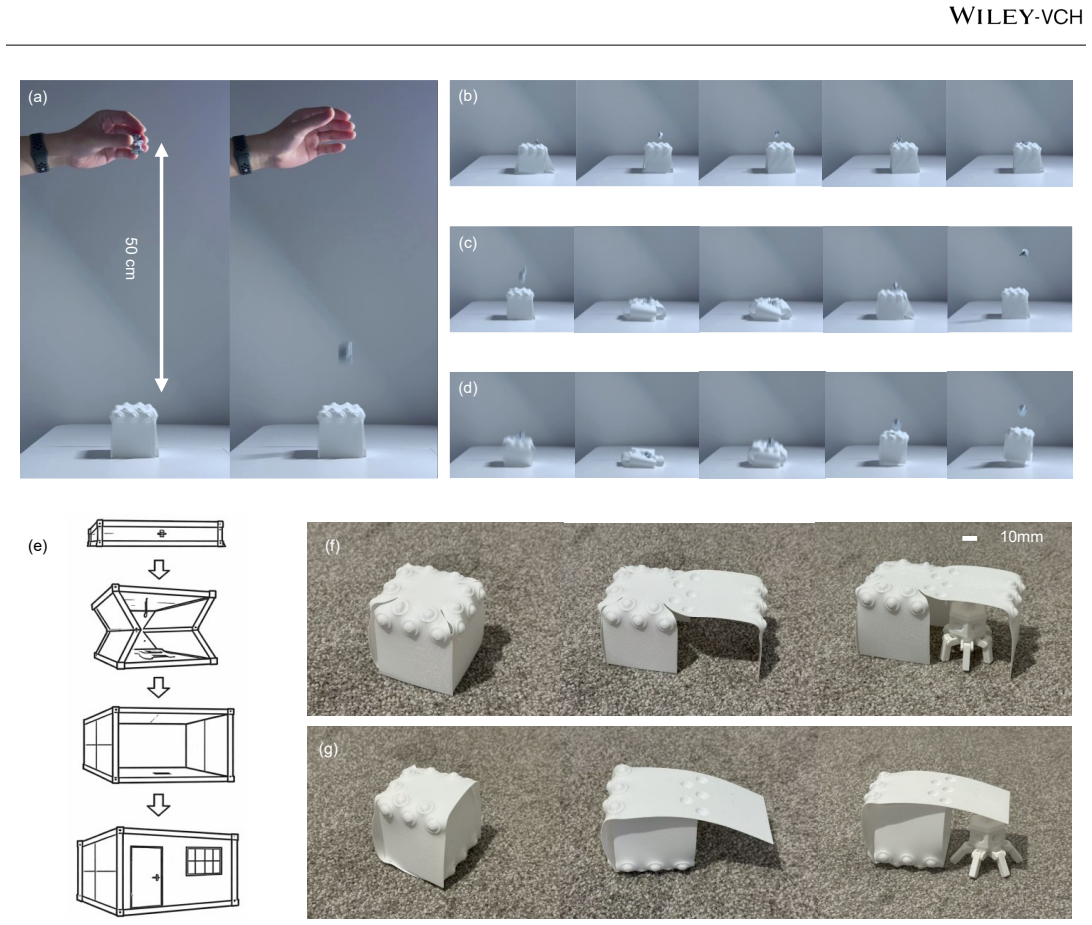
- Self-supporting cubic shells with enhanced impact resistance can be realized.
- Partially deployable cube configurations remain stable upon opening, supporting protective enclosures and deployable structures.
Where Pith is reading between the lines
- The hinge library and charts could serve as a basis for computational tools that automate placement for target shapes beyond the demonstrated polyhedra.
- Preserved bistability after inversion suggests the structures could support repeated reprogramming cycles in adaptive mechanical systems.
- The fabrication-friendly route may combine with additive manufacturing to vary dimple parameters for fine control in scaled deployable designs.
Load-bearing premise
The bistable dimple snapping can be converted into spatially addressable hinges with prescribed folding angles in a continuous sheet while preserving the ability to selectively invert individual dimples without damaging the sheet or losing bistability.
What would settle it
An experiment in which selective dimple inversion either damages the sheet, eliminates bistability, or produces fold angles that deviate from the design charts without additional factors would falsify the central claim.
Figures

read the original abstract
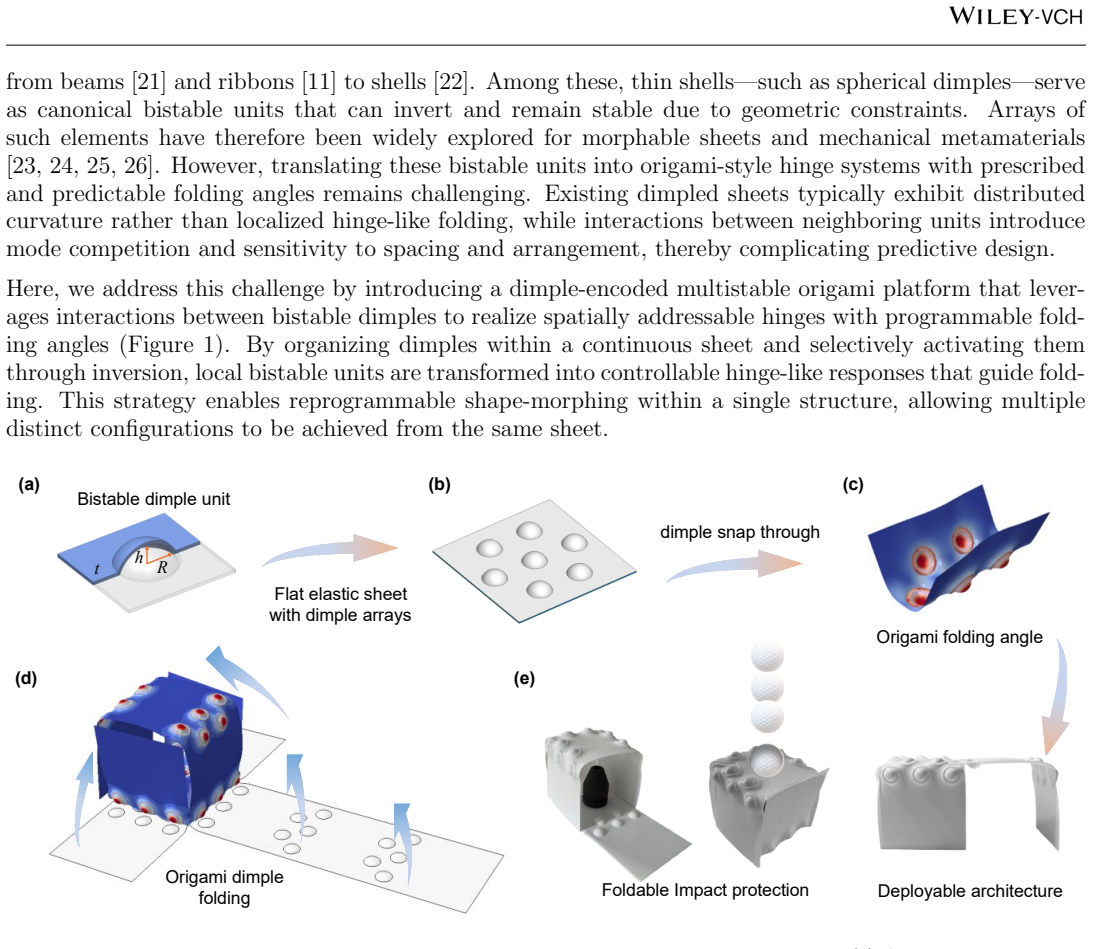
Programmable folding of elastic sheets typically relies on predefined flexible creases or active materials-enabled hinges, which lack intrinsic bistability and limit reprogrammability within a single structure. Here, we present a dimple-encoded origami platform that converts bistable dimple snapping into spatially addressable hinges with prescribed folding angles in a continuous sheet. This interaction-enabled mechanism enables the design of distributed hinge networks through the arrangement and selective inversion of dimples. We establish folding-angle design charts that can be directly used to select local dimple arrangements for target fold angle, forming a practical hinge library without altering the underlying unit geometry. Using this approach, a single dimpled sheet can be reprogrammed to realize multiple distinct configurations, such as triangle, square, and pentagon shapes. We further extend the method to flat-to-3D morphing of polyhedral origami and validate the results through experiments and finite element simulations. As demonstrations, we realize self-supporting cubic shells with enhanced impact resistance and partially deployable cube configurations that remain stable upon opening, highlighting their potential for protective enclosures and deployable architectural structures. The proposed strategy provides a fabrication-friendly route to reprogrammable shape-morphing and adaptive mechanical systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a dimple-encoded origami platform that converts bistable dimple snapping into spatially addressable hinges with prescribed folding angles in a continuous elastic sheet. Local arrangements and selective inversion of dimples enable distributed hinge networks, supported by folding-angle design charts that form a practical hinge library without changing unit geometry. Demonstrations include reprogramming a single sheet into triangle, square, and pentagon shapes, plus flat-to-3D morphing of polyhedral origami such as self-supporting cubic shells with enhanced impact resistance and partially deployable cubes. Results are validated through experiments and finite-element simulations.
Significance. If the central claims hold, this offers a fabrication-friendly route to reprogrammable shape-morphing systems that exploit intrinsic bistability rather than active materials or predefined creases. The design charts and demonstrations of practical applications in protective enclosures and deployable structures could have impact in soft robotics and adaptive mechanics. Experimental and simulation validation for multiple configurations from one sheet is a strength.
major comments (2)
- [§3] §3 (design charts): The folding-angle design charts assume independent dimple behavior for prescribing target angles via local arrangements. No quantitative map or data on elastic interaction range versus dimple spacing is provided. This is load-bearing for the abstract claim that the charts enable distributed hinge networks in a continuous sheet, since long-range strain fields from inversion could alter snapping thresholds or eliminate bistability in neighbors.
- [§5] §5 (validation): The experimental and FEM sections state that results are validated but provide no quantitative metrics, such as measured folding angles with error bars compared to design-chart predictions, or data confirming that selective inversion in dense networks preserves bistability and sheet integrity without damage to adjacent dimples.
minor comments (3)
- [Abstract] The abstract mentions 'finite-element simulations' without specifying software, constitutive model, or boundary conditions; this should be added for clarity.
- [Figures] Figure captions for the polygon and shell demonstrations should explicitly note the number and inversion states of dimples used to achieve each configuration.
- [Discussion] A brief discussion of sheet thickness or material modulus range over which the design charts remain valid would improve applicability.
Simulated Author's Rebuttal
We thank the referee for the constructive review and positive assessment of the significance of our dimple-encoded origami platform. We address each major comment below and will revise the manuscript accordingly to strengthen the quantitative support for our claims.
read point-by-point responses
-
Referee: [§3] §3 (design charts): The folding-angle design charts assume independent dimple behavior for prescribing target angles via local arrangements. No quantitative map or data on elastic interaction range versus dimple spacing is provided. This is load-bearing for the abstract claim that the charts enable distributed hinge networks in a continuous sheet, since long-range strain fields from inversion could alter snapping thresholds or eliminate bistability in neighbors.
Authors: We agree that a quantitative characterization of the elastic interaction range is necessary to rigorously justify the independent-dimple assumption underlying the design charts. In the revised manuscript we will add finite-element results showing the spatial decay of von Mises strain and out-of-plane displacement fields as a function of center-to-center dimple spacing. We will also include experimental measurements of the minimum spacing at which neighboring dimples retain their original snapping thresholds and bistability after selective inversion. These data will be presented as a supplementary interaction-range map that readers can use to select safe spacings for distributed hinge networks. revision: yes
-
Referee: [§5] §5 (validation): The experimental and FEM sections state that results are validated but provide no quantitative metrics, such as measured folding angles with error bars compared to design-chart predictions, or data confirming that selective inversion in dense networks preserves bistability and sheet integrity without damage to adjacent dimples.
Authors: We acknowledge the absence of explicit quantitative validation metrics. The revised manuscript will incorporate (i) tabulated and plotted comparisons of experimentally measured folding angles (with standard deviations from at least five independent trials) against the design-chart predictions for the triangle, square, pentagon, and cubic-shell configurations, and (ii) additional experimental and simulation results on dense dimple networks demonstrating that selective inversion leaves adjacent dimples undamaged and bistable. These will include post-inversion force-displacement curves and high-resolution images confirming sheet integrity. revision: yes
Circularity Check
No significant circularity detected; mechanism and charts are physically grounded rather than self-referential
full rationale
The paper's core contribution is a physical mechanism converting bistable dimple snapping into addressable hinges via local arrangements in a continuous sheet, supported by experimental demonstrations (triangle/square/pentagon shapes, cubic shells) and finite element simulations. No equations, fitted parameters, or derivations are described that reduce by construction to their own inputs (e.g., no self-definitional relations, no 'predictions' that are statistically forced from subsets of the same data, and no load-bearing uniqueness theorems imported via self-citation). The folding-angle design charts are presented as practical selection tools based on observed arrangements, not as mathematical identities equivalent to the input assumptions. The independence of dimple inversion is treated as an empirical engineering condition validated in the reported configurations rather than assumed by definition.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Advanced Science , volume=
Engineering origami: A comprehensive review of recent applications, design methods, and tools , author=. Advanced Science , volume=. 2021 , publisher=
2021
-
[2]
Nature Reviews Methods Primers , volume=
Origami engineering , author=. Nature Reviews Methods Primers , volume=. 2024 , publisher=
2024
-
[3]
Nature Communications , volume=
Large-scale modular and uniformly thick origami-inspired adaptable and load-carrying structures , author=. Nature Communications , volume=. 2024 , publisher=
2024
-
[4]
Nature Reviews Materials , volume=
Design, fabrication and control of origami robots , author=. Nature Reviews Materials , volume=. 2018 , publisher=
2018
-
[5]
Soft Science , volume=
Morphing matter: from mechanical principles to robotic applications , author=. Soft Science , volume=. 2023 , publisher=
2023
-
[6]
Extreme Mechanics Letters , volume=
Origami electronic membranes as highly shape-morphable mechanical and environmental sensing systems , author=. Extreme Mechanics Letters , volume=. 2024 , publisher=
2024
-
[7]
Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=
The shallow shell approach to Pogorelov's problem and the breakdown of ‘mirror buckling’ , author=. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=. 2016 , publisher=
2016
-
[8]
Journal of Mechanisms and Robotics , volume=
Evaluating compliant hinge geometries for origami-inspired mechanisms , author=. Journal of Mechanisms and Robotics , volume=. 2015 , publisher=
2015
-
[9]
International Journal of Space Structures , volume=
An overview of mechanisms and patterns with origami , author=. International Journal of Space Structures , volume=. 2012 , publisher=
2012
-
[10]
Physical Review Letters , volume=
Origami multistability: from single vertices to metasheets , author=. Physical Review Letters , volume=. 2015 , publisher=
2015
-
[11]
International Journal of Mechanical Sciences , volume=
Reprogrammable gripper through pneumatic tunable bistable origami actuators , author=. International Journal of Mechanical Sciences , volume=. 2025 , publisher=
2025
-
[12]
Advanced Materials , volume=
Triclinic metamaterials by tristable origami with reprogrammable frustration , author=. Advanced Materials , volume=. 2022 , publisher=
2022
-
[13]
Extreme Mechanics Letters , volume=
From rigid to amorphous folding behavior in origami-inspired metamaterials with bistable hinges , author=. Extreme Mechanics Letters , volume=. 2022 , publisher=
2022
-
[14]
Nature , volume=
Multistable inflatable origami structures at the metre scale , author=. Nature , volume=. 2021 , publisher=
2021
-
[15]
Materials & Design , volume=
Hinges for origami-inspired structures by multimaterial additive manufacturing , author=. Materials & Design , volume=. 2020 , publisher=
2020
-
[16]
Advanced Materials , volume=
Active materials for functional origami , author=. Advanced Materials , volume=. 2024 , publisher=
2024
-
[17]
Advanced Biosystems , volume=
Origami biosystems: 3D assembly methods for biomedical applications , author=. Advanced Biosystems , volume=. 2018 , publisher=
2018
-
[18]
Journal of microelectromechanical systems , volume=
A curved-beam bistable mechanism , author=. Journal of microelectromechanical systems , volume=. 2004 , publisher=
2004
-
[19]
Journal of the Mechanics and Physics of Solids , volume=
Delayed bifurcation in elastic snap-through instabilities , author=. Journal of the Mechanics and Physics of Solids , volume=. 2021 , publisher=
2021
-
[20]
Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=
Static bistability of spherical caps , author=. Proceedings of the Royal Society A: Mathematical, Physical and Engineering Sciences , volume=. 2018 , publisher=
2018
-
[21]
Advanced science , volume=
Dome-patterned metamaterial sheets , author=. Advanced science , volume=. 2020 , publisher=
2020
-
[22]
Scripta materialia , volume=
Mechanical memory metal: a novel material for developing morphing engineering structures , author=. Scripta materialia , volume=. 2006 , publisher=
2006
-
[23]
Acta Mechanica Sinica , volume=
Design of compliant mechanisms for origami metamaterials , author=. Acta Mechanica Sinica , volume=. 2023 , publisher=
2023
-
[24]
Nature Reviews Materials , volume=
Flexible mechanical metamaterials , author=. Nature Reviews Materials , volume=. 2017 , publisher=
2017
-
[25]
Matter , volume=
Integration of kinks and creases enables tunable folding in meta-ribbons , author=. Matter , volume=. 2024 , publisher=
2024
-
[26]
Tapered elastic
Liu, Mingchao and Domino, Lucie and Vella, Dominic , journal=. Tapered elastic. 2020 , publisher=
2020
-
[27]
Annual Review of Control, Robotics, and Autonomous Systems , volume=
Nematic Design for Shape Morphing , author=. Annual Review of Control, Robotics, and Autonomous Systems , volume=. 2025 , publisher=
2025
-
[28]
Journal of the Mechanics and Physics of Solids , volume=
Snap-induced morphing: From a single bistable shell to the origin of shape bifurcation in interacting shells , author=. Journal of the Mechanics and Physics of Solids , volume=. 2023 , publisher=
2023
-
[29]
Advanced Materials , volume=
Origami metamaterials for tunable thermal expansion , author=. Advanced Materials , volume=. 2017 , publisher=
2017
-
[30]
Nature Communications , volume=
Origami metamaterials for ultra-wideband and large-depth reflection modulation , author=. Nature Communications , volume=. 2024 , publisher=
2024
-
[31]
Proceedings of the National Academy of Sciences , volume=
Bistable metamaterial for switching and cascading elastic vibrations , author=. Proceedings of the National Academy of Sciences , volume=. 2017 , publisher=
2017
-
[32]
Advanced Materials , volume=
Remorphable architectures: Reprogramming global bistability through locally bistable metamaterials , author=. Advanced Materials , volume=. 2026 , publisher=
2026
-
[33]
Advanced Functional Materials , volume=
Bistable structures for advanced functional systems , author=. Advanced Functional Materials , volume=. 2021 , publisher=
2021
-
[34]
Advanced Materials , volume=
Bistable and multistable actuators for soft robots: Structures, materials, and functionalities , author=. Advanced Materials , volume=. 2022 , publisher=
2022
-
[35]
Advanced Science , volume=
Embodying Control in Soft Multistable Robots from Morphofunctional Co-design , author=. Advanced Science , volume=. 2025 , publisher=
2025
-
[36]
Advanced intelligent systems , volume=
Multistable soft robots assembled from bistable auxetic building blocks , author=. Advanced intelligent systems , volume=. 2025 , publisher=
2025
-
[37]
Science robotics , volume=
Shape morphing mechanical metamaterials through reversible plasticity , author=. Science robotics , volume=. 2022 , publisher=
2022
-
[38]
Extreme mechanics letters , volume=
Programmable mechanical metastructures from locally bistable domes , author=. Extreme mechanics letters , volume=. 2021 , publisher=
2021
-
[39]
International Journal of Mechanical Sciences , volume=
Mechanical behavior of embedded bistable dome shell with tunable energy barrier asymmetry , author=. International Journal of Mechanical Sciences , volume=. 2024 , publisher=
2024
-
[40]
1988 , publisher=
Bendings of surfaces and stability of shells , author=. 1988 , publisher=
1988
-
[41]
SIAM journal on numerical analysis , volume=
An analysis of the total least squares problem , author=. SIAM journal on numerical analysis , volume=. 1980 , publisher=
1980
-
[42]
shape: Teachers cope with incompatible perspectives on angle , author=
Turn vs. shape: Teachers cope with incompatible perspectives on angle , author=. Educational Studies in Mathematics , volume=. 2016 , publisher=
2016
-
[43]
Engineering Structures , volume=
Origami-inspired deployable spatial structures with terrain adaptability , author=. Engineering Structures , volume=. 2025 , publisher=
2025
-
[44]
Science Robotics , volume=
Rotorigami: A rotary origami protective system for robotic rotorcraft , author=. Science Robotics , volume=. 2018 , publisher=
2018
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.