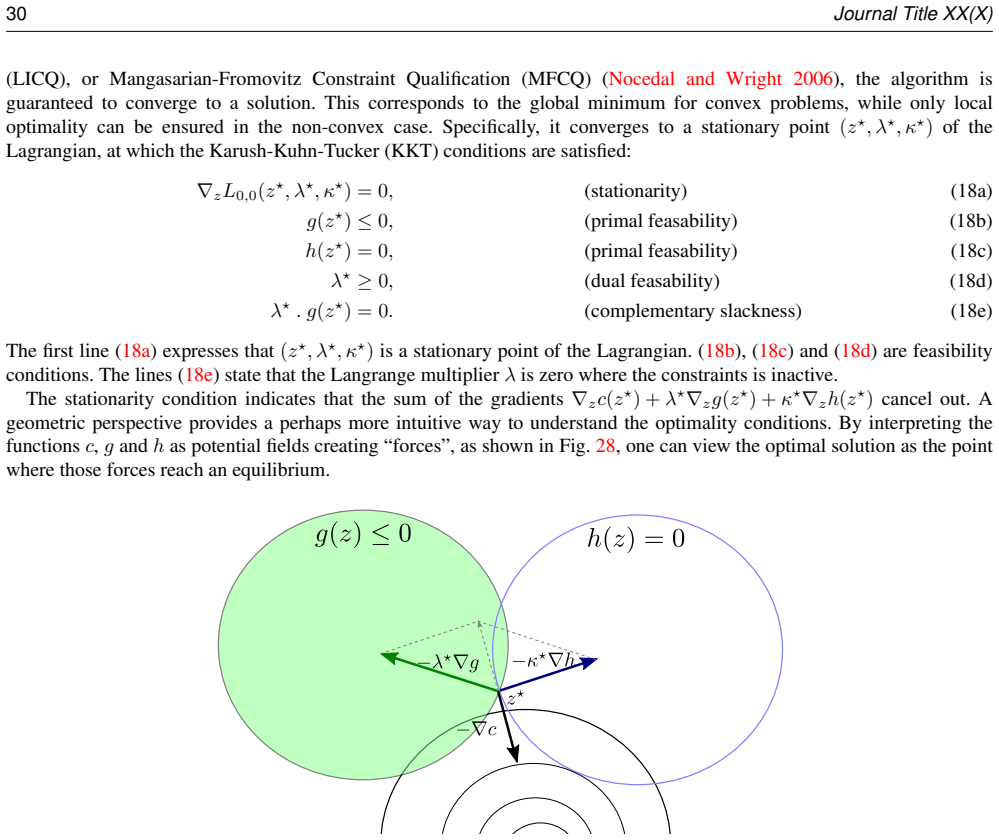
Recognition: unknown
Optimizing Trajectory-Trees in Belief Space: An Application from Model Predictive Control to Task and Motion Planning
Pith reviewed 2026-05-10 14:44 UTC · model grok-4.3
The pith
Trajectory-trees optimized in belief space capture observation-dependent contingencies that sequential paths miss.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
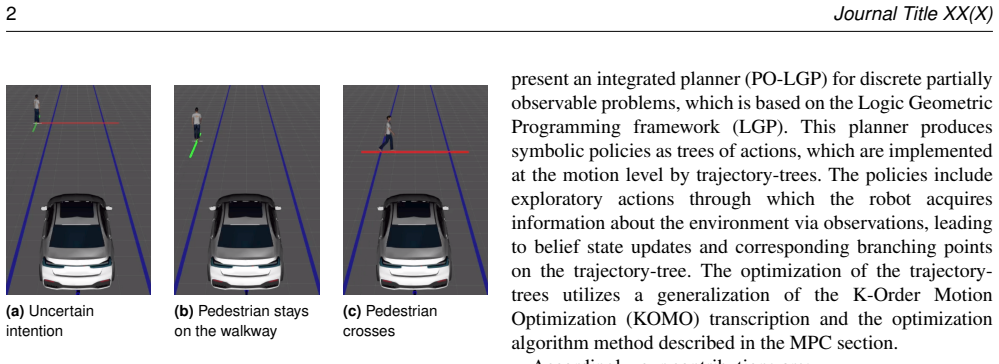
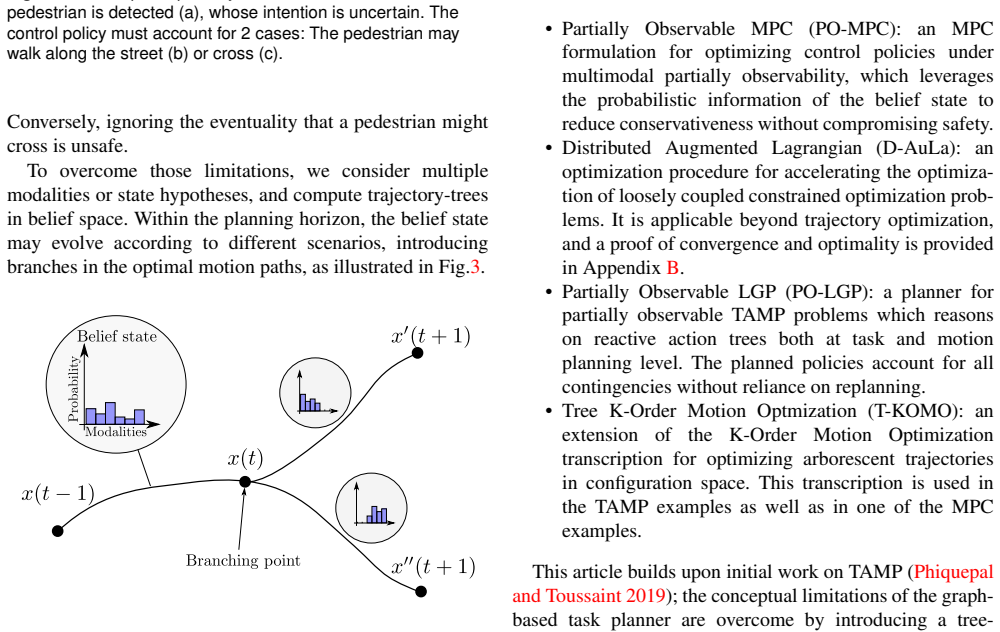
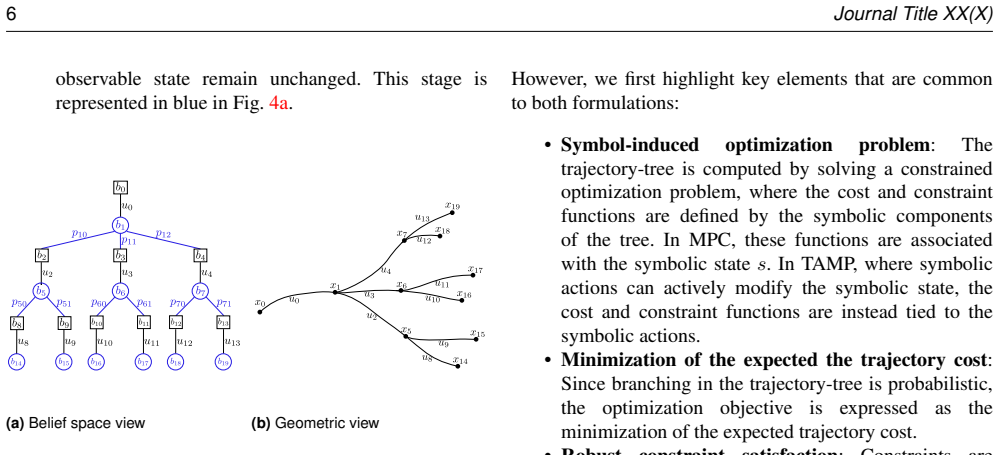
Computing arborescent trajectories (trajectory-trees) instead of sequential trajectories for partially observable robotic planning problems allows the optimal course of action to depend on future observations by branching where the belief state evolves into multiple distinct scenarios. In MPC this is realized as PO-MPC with a single branching point, solved via the Distributed Augmented Lagrangian algorithm for real-time use on linear and nonlinear driving examples. In TAMP the PO-LGP planner combines logic-geometric programming with task-level decision trees and motion-level trajectory trees, scaling to larger problems by treating optimized explorative policies as macro-actions.
What carries the argument
Trajectory-trees (arborescent trajectories) in belief space, which branch at predicted observation points to model multiple contingencies instead of one forward evolution.
If this is right
- A tree with one branching point already reduces control cost relative to a single trajectory by incorporating the value of future information.
- The decomposable structure of the tree formulation permits parallel solving via Distributed Augmented Lagrangian, meeting MPC timing limits.
- At the task level, decision trees combined with motion-level trajectory trees extend logic-geometric programming to partially observable settings.
- Explorative policies optimized as macro-actions let the approach scale beyond very small belief spaces.
Where Pith is reading between the lines
- The same branching structure could be applied to multi-agent settings where each agent maintains beliefs about the others.
- Replacing hand-crafted branching predictions with learned models of observation likelihoods would reduce the manual modeling burden.
- In deployed systems the tree representation naturally supplies contingency plans that can be swapped in when an unexpected observation arrives.
Load-bearing premise
Belief-state evolution and branching points can be predicted accurately enough in advance that the resulting tree optimization stays tractable under real-time constraints.
What would settle it
In the autonomous driving MPC experiments, run the sequential-trajectory baseline and the single-branch tree optimizer on identical noisy-observation trials and check whether the tree version produces measurably lower total control cost or fails to finish within the MPC time budget.
Figures

























read the original abstract
This paper explores the benefits of computing arborescent trajectories (trajectory-trees) instead of commonly used sequential trajectories for partially observable robotic planning problems. In such environments, a robot infers knowledge from observations, and the optimal course of action depends on these observations. \revise{Trajectory-trees, optimized in belief space, naturally capture this dependency by branching where the belief state is expected to evolve into multiple distinct scenarios, such as upon receiving an observation. Unlike sequential trajectories, which model a single forward evolution of the system, trajectory-trees capture multiple possible contingencies.} First, we focus on Model Predictive Control (MPC) and demonstrate the benefits of planning tree-like trajectories. We formulate the control problem as the optimization of a tree with a single branching (PO-MPC). This improves performance by reducing control costs through more informed planning. To satisfy the real-time constraints of MPC, we develop an optimization algorithm called Distributed Augmented Lagrangian (D-AuLa), which leverages the decomposability of the PO-MPC formulation to parallelize and accelerate the optimization. We apply the method to both linear and non-linear MPC problems using autonomous driving examples. Second, we address Task And Motion Planning (TAMP), and introduce a planner (PO-LGP) reasoning on decision trees at task level, and trajectory-trees at motion-planning level. This approach builds upon the Logic-Geometric-Programming Framework (LGP) and extends it to partially observable problems. The experiments show the method's applicability to problems with a small belief state size, and scales to larger problems by optimizing explorative policies, which are used as macro-actions in an overarching task plan.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims that optimizing trajectory-trees in belief space outperforms sequential trajectories for partially observable robotic planning by explicitly capturing observation-dependent contingencies. It introduces PO-MPC, a single-branch tree formulation for model predictive control solved in real time via the Distributed Augmented Lagrangian (D-AuLa) method and demonstrated on linear/non-linear autonomous driving examples; it also presents PO-LGP, which extends the Logic-Geometric-Programming (LGP) framework to partially observable TAMP by combining task-level decision trees with motion-level trajectory-trees and using pre-optimized explorative policies as macro-actions to scale to larger belief spaces.
Significance. If the experimental claims hold and the fixed branching structures prove robust, the work would offer a practical bridge between receding-horizon MPC and high-level TAMP under uncertainty, with the D-AuLa parallelization providing a concrete algorithmic advance for real-time belief-space optimization. The extension of LGP to PO settings and the use of macro-actions for scalability are potentially valuable contributions to the robotics planning literature.
major comments (3)
- [Abstract / PO-MPC section] Abstract and PO-MPC formulation: the central claim that 'trajectory-trees, optimized in belief space, naturally capture this dependency by branching where the belief state is expected to evolve into multiple distinct scenarios' rests on the pre-chosen branching points remaining representative online. With only a single branching point used in PO-MPC, the formulation does not address how the tree handles deviations when actual observations produce belief trajectories outside the predicted branch (common in noisy non-linear driving); this structural assumption is load-bearing and requires either a robustness analysis or explicit comparison against receding-horizon sequential MPC under mismatched observations.
- [PO-LGP and TAMP experiments] PO-LGP description and experiments: the approach relies on pre-optimized explorative policies as macro-actions for larger belief spaces. If real observations cause the belief state to evolve differently from the precomputed branches, the overarching task plan may lose its contingency benefits; the manuscript should include sensitivity experiments or bounds showing that the combined task-motion plan remains effective under such deviations, as this directly affects the scalability claim.
- [D-AuLa algorithm description] D-AuLa solver: while the method exploits decomposability for parallelization to meet MPC real-time constraints, the paper must clarify any approximations or convergence guarantees when the augmented Lagrangian is applied to the non-convex belief-space tree optimization; without this, it is difficult to assess whether the reported performance gains in the driving examples are due to the tree structure or to solver-specific relaxations.
minor comments (3)
- [Abstract] The abstract states that the method 'improves performance by reducing control costs' but does not preview any quantitative metrics (e.g., cost reduction percentages or timing); adding a brief results summary would strengthen the abstract.
- [Introduction / Preliminaries] Notation for belief states, branching points, and the distinction between decision trees and trajectory-trees should be introduced with a small illustrative figure early in the paper to aid readability.
- [Experiments] Ensure that all experimental figures clearly label the planned tree branches versus executed paths under actual observations.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment below and have revised the manuscript to strengthen the presentation and address the concerns where possible.
read point-by-point responses
-
Referee: [Abstract / PO-MPC section] Abstract and PO-MPC formulation: the central claim that 'trajectory-trees, optimized in belief space, naturally capture this dependency by branching where the belief state is expected to evolve into multiple distinct scenarios' rests on the pre-chosen branching points remaining representative online. With only a single branching point used in PO-MPC, the formulation does not address how the tree handles deviations when actual observations produce belief trajectories outside the predicted branch (common in noisy non-linear driving); this structural assumption is load-bearing and requires either a robustness analysis or explicit comparison against receding-horizon sequential MPC under mismatched observations.
Authors: We agree that the representativeness of the chosen branching point is important. In the PO-MPC formulation, the tree is re-optimized at every receding-horizon step using the updated belief, which inherently adapts to observed deviations within the horizon. The single branching point is placed at the time step where the belief is predicted to split most significantly. To directly address the concern about mismatched observations, we have added an explicit comparison in the experiments section against receding-horizon sequential MPC under increased observation noise in the non-linear driving example, demonstrating that the tree structure still yields lower costs by planning for contingencies. We have also expanded the discussion on branching-point selection. revision: yes
-
Referee: [PO-LGP and TAMP experiments] PO-LGP description and experiments: the approach relies on pre-optimized explorative policies as macro-actions for larger belief spaces. If real observations cause the belief state to evolve differently from the precomputed branches, the overarching task plan may lose its contingency benefits; the manuscript should include sensitivity experiments or bounds showing that the combined task-motion plan remains effective under such deviations, as this directly affects the scalability claim.
Authors: We acknowledge that deviations in belief evolution could affect the contingency benefits. The explorative policies are designed to reduce uncertainty across likely scenarios, and the task-level decision tree permits higher-level replanning. To strengthen the scalability claim, we have added sensitivity experiments in the revised PO-LGP section by perturbing the observation model parameters and reporting success rates and plan costs, showing that the macro-action approach maintains effectiveness for the tested belief-space sizes. revision: yes
-
Referee: [D-AuLa algorithm description] D-AuLa solver: while the method exploits decomposability for parallelization to meet MPC real-time constraints, the paper must clarify any approximations or convergence guarantees when the augmented Lagrangian is applied to the non-convex belief-space tree optimization; without this, it is difficult to assess whether the reported performance gains in the driving examples are due to the tree structure or to solver-specific relaxations.
Authors: We thank the referee for this point on solver properties. D-AuLa decomposes the tree optimization into parallel subproblems using the augmented Lagrangian, with consensus constraints enforced across branches. While the underlying problem is non-convex and we do not claim global convergence, the method uses local optimality with warm-starting from prior MPC iterations. We have added a dedicated paragraph in the D-AuLa section clarifying these aspects, including the practical convergence behavior observed and a note that performance improvements are validated by direct comparison to a sequential baseline solved with the same optimizer, isolating the contribution of the tree structure. revision: yes
Circularity Check
No significant circularity; derivation is self-contained
full rationale
The paper introduces PO-MPC (single-branch tree optimization with D-AuLa solver) and PO-LGP (extending LGP to belief-space trees with explorative policies as macro-actions). These are new algorithmic formulations applied to driving and TAMP examples. The claim that trees capture contingencies by branching at predicted belief scenarios follows directly from the stated optimization objective and tree structure definition, without any quoted reduction of outputs to fitted inputs or self-defined quantities by construction. Prior LGP citation provides the base framework but is not load-bearing for the partial-observability extension or the reported performance gains.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
, author=
Latent Belief Space Motion Planning under Cost, Dynamics, and Intent Uncertainty. , author=. Robotics: science and systems , year=
-
[2]
IEEE Control Systems , doi =
Mesbah, Ali , year =. IEEE Control Systems , doi =
-
[3]
Heirung and Joel A
Tor Aksel N. Heirung and Joel A. Paulson and Jared O'Leary and Ali Mesbah , journal=. 2017 , volume=
2017
-
[4]
Campo and Manfred Morari , journal=
Peter J. Campo and Manfred Morari , journal=. 1987 , pages=
1987
-
[5]
Löfberg, Johan , year =
-
[6]
Automatica , volume=
Robust model predictive control using tubes , author=. Automatica , volume=. 2004 , publisher=
2004
-
[7]
IEEE Transactions on Automatic control , volume=
Min-max feedback model predictive control for constrained linear systems , author=. IEEE Transactions on Automatic control , volume=. 1998 , publisher=
1998
-
[8]
S. Lucia and T. Finkler and D. Basak and S. Engell. A new Robust NMPC Scheme and its Application to a Semi-batch Reactor Example*. IFAC Proceedings Volumes. 2012. doi:https://doi.org/10.3182/20120710-4-SG-2026.00035
-
[9]
Sergio Lucia and Tiago Finkler and Sebastian Engell. Multi-stage nonlinear model predictive control applied to a semi-batch polymerization reactor under uncertainty. Journal of Process Control. 2013. doi:https://doi.org/10.1016/j.jprocont.2013.08.008
-
[10]
Journal of Process Control , doi =
Lucia, Sergio and Andersson, Joel and Brandt, Heiko and Diehl, Moritz and Engell, Sebastian , year =. Journal of Process Control , doi =
-
[11]
International Journal of Robust and Nonlinear Control , doi =
Kouzoupis, Dimitris and Klintberg, Emil and Diehl, Moritz and Gros, Sebastien , year =. International Journal of Robust and Nonlinear Control , doi =
-
[12]
IEEE Transactions on Control Systems Technology , title=
E. IEEE Transactions on Control Systems Technology , title=. 2017 , volume=
2017
-
[13]
Leidereiter, Conrad and Potschka, Andreas and Bock, Hans , year =
-
[14]
2018 23rd International Conference on Methods Models in Automation Robotics (MMAR) , title=
S. 2018 23rd International Conference on Methods Models in Automation Robotics (MMAR) , title=. 2018 , volume=
2018
-
[15]
On Integrating POMDP and Scenario MPC for Planning under Uncertainty – with Applications to Highway Driving , year=
Ulfsjöö, Carl Hynén and Axehill, Daniel , booktitle=. On Integrating POMDP and Scenario MPC for Planning under Uncertainty – with Applications to Highway Driving , year=
-
[16]
and Wahlberg, Bo , booktitle=
Oliveira, Rui and Nair, Siddharth H. and Wahlberg, Bo , booktitle=. Interaction and Decision Making-aware Motion Planning using Branch Model Predictive Control , year=
-
[17]
IEEE Robotics and Automation Letters , volume=
Interactive multi-modal motion planning with branch model predictive control , author=. IEEE Robotics and Automation Letters , volume=. 2022 , publisher=
2022
-
[18]
Mathematical programming , volume=
On the implementation of an interior-point filter line-search algorithm for large-scale nonlinear programming , author=. Mathematical programming , volume=. 2006 , publisher=
2006
-
[19]
Control Engineering Practice , volume=
Rapid development of modular and sustainable nonlinear model predictive control solutions , author=. Control Engineering Practice , volume=. 2017 , publisher=
2017
-
[20]
Mathematical Programming Computation , volume=
OSQP: An operator splitting solver for quadratic programs , author=. Mathematical Programming Computation , volume=. 2020 , publisher=
2020
-
[21]
Annual review of control, robotics, and autonomous systems , volume=
Integrated task and motion planning , author=. Annual review of control, robotics, and autonomous systems , volume=. 2021 , publisher=
2021
-
[22]
ACM Computing Surveys , volume=
Recent trends in task and motion planning for robotics: A survey , author=. ACM Computing Surveys , volume=. 2023 , publisher=
2023
-
[23]
, author=
Logic-Geometric Programming: An Optimization-Based Approach to Combined Task and Motion Planning. , author=. IJCAI , pages=
-
[24]
2017 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Multi-bound tree search for logic-geometric programming in cooperative manipulation domains , author=. 2017 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2017 , organization=
2017
-
[25]
Differentiable Physics and Stable Modes for Tool-Use and Manipulation Planning , author =. Proc. 2018 , youtube =
2018
-
[26]
IEEE Transactions on Robotics , volume=
Long-horizon multi-robot rearrangement planning for construction assembly , author=. IEEE Transactions on Robotics , volume=. 2022 , publisher=
2022
-
[27]
2023 , school=
Scalable multi-agent task and motion planning for robotic building construction , author=. 2023 , school=
2023
-
[28]
The International Journal of Robotics Research , volume=
Learning to solve sequential physical reasoning problems from a scene image , author=. The International Journal of Robotics Research , volume=. 2021 , publisher=
2021
-
[29]
Combined Task and Motion Planning under Partial Observability: An Optimization-Based Approach , author =. Proc. 2019 , youtube =
2019
-
[30]
The International Journal of Robotics Research , volume=
Integrated task and motion planning in belief space , author=. The International Journal of Robotics Research , volume=. 2013 , publisher=
2013
-
[31]
2020 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Online replanning in belief space for partially observable task and motion problems , author=. 2020 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2020 , organization=
2020
-
[32]
arXiv preprint arXiv:1801.09780 , year=
Bounded policy synthesis for POMDPs with safe-reachability objectives , author=. arXiv preprint arXiv:1801.09780 , year=
-
[33]
2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Probabilistic inference in planning for partially observable long horizon problems , author=. 2021 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2021 , organization=
2021
-
[34]
Long-Horizon Planning Under Uncertainty and Geometric Constraints for Mobile Manipulation by Autonomous Humanoid Robots , author=
-
[35]
2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=
Modular task and motion planning in belief space , author=. 2015 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) , pages=. 2015 , organization=
2015
-
[36]
2013 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=
Foresight and reconsideration in hierarchical planning and execution , author=. 2013 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=. 2013 , organization=
2013
-
[37]
arXiv preprint arXiv:1908.10227 , year=
Task-assisted motion planning in partially observable domains , author=. arXiv preprint arXiv:1908.10227 , year=
-
[38]
arXiv preprint arXiv:1802.05835 , year=
An anytime algorithm for task and motion mdps , author=. arXiv preprint arXiv:1802.05835 , year=
-
[39]
2020 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Anytime integrated task and motion policies for stochastic environments , author=. 2020 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2020 , organization=
2020
-
[40]
The HMDPP planner for planning with probabilities , author=
-
[41]
, author=
Belief space planning assuming maximum likelihood observations. , author=. Robotics: Science and systems , volume=
-
[42]
AI magazine , volume=
FF: The fast-forward planning system , author=. AI magazine , volume=
-
[43]
Proceedings of the international conference on automated planning and scheduling , volume=
Pddlstream: Integrating symbolic planners and blackbox samplers via optimistic adaptive planning , author=. Proceedings of the international conference on automated planning and scheduling , volume=
-
[44]
Artificial Intelligence , volume=
LAO: A heuristic search algorithm that finds solutions with loops , author=. Artificial Intelligence , volume=. 2001 , publisher=
2001
-
[45]
Robotics: Science and Systems IX , year=
Finding Locally Optimal, Collision-Free Trajectories with Sequential Convex Optimization , author=. Robotics: Science and Systems IX , year=
-
[46]
Annual Review of Control, Robotics, and Autonomous Systems , volume=
Sampling-based motion planning: A comparative review , author=. Annual Review of Control, Robotics, and Autonomous Systems , volume=. 2023 , publisher=
2023
-
[47]
IEEE Transactions on Robotics , volume=
Partially observable markov decision processes in robotics: A survey , author=. IEEE Transactions on Robotics , volume=. 2022 , publisher=
2022
-
[48]
Annual Review of Control, Robotics, and Autonomous Systems , volume=
Partially observable markov decision processes and robotics , author=. Annual Review of Control, Robotics, and Autonomous Systems , volume=. 2022 , publisher=
2022
-
[49]
2021 IEEE International Conference on Robotics and Automation (ICRA) , pages=
Control-Tree Optimization: an approach to MPC under discrete Partial Observability , author=. 2021 IEEE International Conference on Robotics and Automation (ICRA) , pages=. 2021 , organization=
2021
-
[50]
2019 International Conference on Robotics and Automation (ICRA) , pages=
Combined task and motion planning under partial observability: An optimization-based approach , author=. 2019 International Conference on Robotics and Automation (ICRA) , pages=. 2019 , organization=
2019
-
[51]
Geometric and Numerical Foundations of Movements , editor =
Toussaint, Marc , title =. Geometric and Numerical Foundations of Movements , editor =
- [52]
-
[53]
Underactuated Robotics
Tedrake, Russ. Underactuated Robotics
-
[54]
Optimization Algorithms for Model Predictive Control
Diehl, Moritz. Optimization Algorithms for Model Predictive Control. Encyclopedia of Systems and Control. 2013. doi:10.1007/978-1-4471-5102-9_9-1
-
[55]
Littman and Anthony R
Michael L. Littman and Anthony R. Cassandra and Leslie Pack Kaelbling , title =
-
[56]
2014 , eprint=
A Novel Augmented Lagrangian Approach for Inequalities and Convergent Any-Time Non-Central Updates , author=. 2014 , eprint=
2014
-
[57]
A Globally Convergent Augmented Lagrangian Algorithm for Optimization with General Constraints and Simple Bounds , volume =
Conn, Andrew and Gould, Nicholas and Toint, Philippe , year =. A Globally Convergent Augmented Lagrangian Algorithm for Optimization with General Constraints and Simple Bounds , volume =. SIAM Journal on Numerical Analysis , doi =
-
[58]
Boyd, Stephen and Parikh, Neal and Chu, Eric and Peleato, Borja and Eckstein, Jonathan , title =. Found. Trends Mach. Learn. , month = jan, pages =. 2011 , issue_date =. doi:10.1561/2200000016 , abstract =
-
[59]
Advances in neural information processing systems , volume=
Monte-Carlo planning in large POMDPs , author=. Advances in neural information processing systems , volume=
-
[60]
Journal of Machine Learning Research , volume=
R-max-a general polynomial time algorithm for near-optimal reinforcement learning , author=. Journal of Machine Learning Research , volume=
-
[61]
A Survey of Optimization-Based Task and Motion Planning: From Classical to Learning Approaches , year=
Zhao, Zhigen and Cheng, Shuo and Ding, Yan and Zhou, Ziyi and Zhang, Shiqi and Xu, Danfei and Zhao, Ye , journal=. A Survey of Optimization-Based Task and Motion Planning: From Classical to Learning Approaches , year=
-
[62]
2004 , publisher=
Convex Optimization , author=. 2004 , publisher=
2004
-
[63]
2006 , publisher=
Numerical Optimization , author=. 2006 , publisher=
2006
-
[64]
The International Journal of Robotics Research , volume=
The belief roadmap: Efficient planning in belief space by factoring the covariance , author=. The International Journal of Robotics Research , volume=. 2009 , publisher=
2009
-
[65]
The International Journal of Robotics Research , volume=
FIRM: Sampling-based feedback motion-planning under motion uncertainty and imperfect measurements , author=. The International Journal of Robotics Research , volume=. 2014 , publisher=
2014
-
[66]
arXiv preprint arXiv:2011.03813 , year=
MAGIC: Learning macro-actions for online POMDP planning , author=. arXiv preprint arXiv:2011.03813 , year=
-
[67]
2014 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=
Health aware stochastic planning for persistent package delivery missions using quadrotors , author=. 2014 IEEE/RSJ International Conference on Intelligent Robots and Systems , pages=. 2014 , organization=
2014
-
[68]
Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
Covernet: Multimodal behavior prediction using trajectory sets , author=. Proceedings of the IEEE/CVF conference on computer vision and pattern recognition , pages=
-
[69]
The International Journal of Robotics Research , volume=
Motion planning under uncertainty for robotic tasks with long time horizons , author=. The International Journal of Robotics Research , volume=. 2011 , publisher=
2011
-
[70]
arXiv preprint arXiv:2411.07032 , year=
Scaling Long-Horizon Online POMDP Planning via Rapid State Space Sampling , author=. arXiv preprint arXiv:2411.07032 , year=
-
[71]
Advances in Neural Information Processing Systems , volume=
Reference-based POMDPs , author=. Advances in Neural Information Processing Systems , volume=
-
[72]
Advances in neural information processing systems , volume=
DESPOT: Online POMDP planning with regularization , author=. Advances in neural information processing systems , volume=
-
[73]
Proceedings of the IEEE international conference on computer vision , pages=
Learning in an uncertain world: Representing ambiguity through multiple hypotheses , author=. Proceedings of the IEEE international conference on computer vision , pages=
-
[74]
IEEE transactions on intelligent transportation systems , volume=
Naturalistic driver intention and path prediction using recurrent neural networks , author=. IEEE transactions on intelligent transportation systems , volume=. 2019 , publisher=
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.