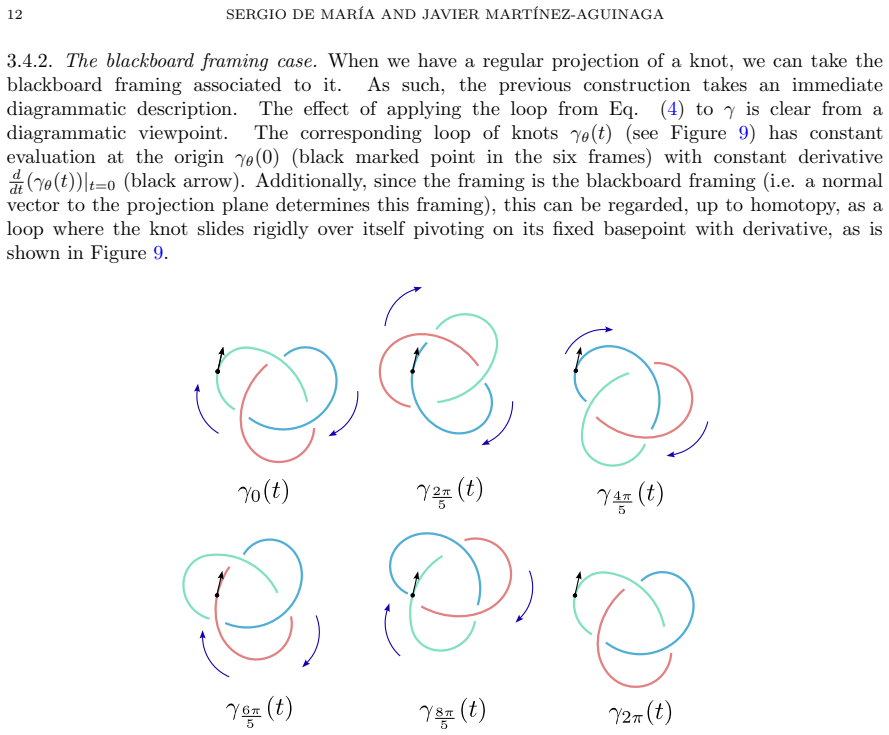
Recognition: 2 theorem links
· Lean TheoremA constructive solution to the equivalence problem for knot projectivizations
Pith reviewed 2026-05-08 19:17 UTC · model grok-4.3
The pith
An algorithm produces explicit isotopies connecting any two projectivizations of the same affine knot in RP^3.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We adapt an idea due to A. Hatcher from embedding spaces to describe an algorithm that produces an explicit isotopy between any two given projectivizations of the same affine knot. We introduce the notion of lensification of a knot in any lens space L(p,q) and describe an algorithm that works in that setting, of which RP^3 is a special case. We apply the algorithm to several pairs of knots from the literature for which the equivalence problem was open, finding explicit isotopies.
What carries the argument
The algorithm obtained by adapting Hatcher's embedding-space techniques to produce isotopies between knot projectivizations.
If this is right
- The equivalence of any two projectivizations of the same affine knot can be decided by executing the algorithm.
- Explicit isotopies are now available for all pairs of projectivizations of a given affine knot.
- The procedure extends directly to lensifications of knots inside arbitrary lens spaces L(p,q).
- Specific open equivalence questions from the literature receive concrete isotopy witnesses.
Where Pith is reading between the lines
- The algorithm could be implemented computationally to verify equivalences for knots with crossing numbers beyond manual reach.
- Similar constructive adaptations might resolve equivalence problems for knots in other quotient manifolds.
- The method supplies a practical tool for exploring the connected components of the space of knots in RP^3.
Load-bearing premise
Hatcher's embedding-space techniques adapt to knot projectivizations in RP^3 and lens spaces in a way that produces a terminating algorithm giving a valid isotopy exactly when the two projectivizations are equivalent.
What would settle it
Finding two projectivizations of the same affine knot for which the algorithm does not terminate or does not produce a valid isotopy between them.
Figures


read the original abstract
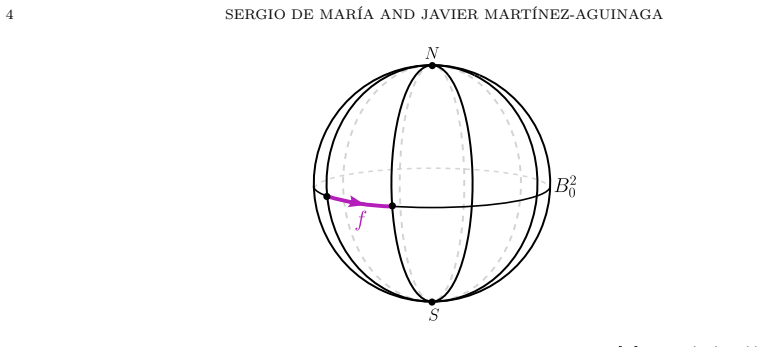
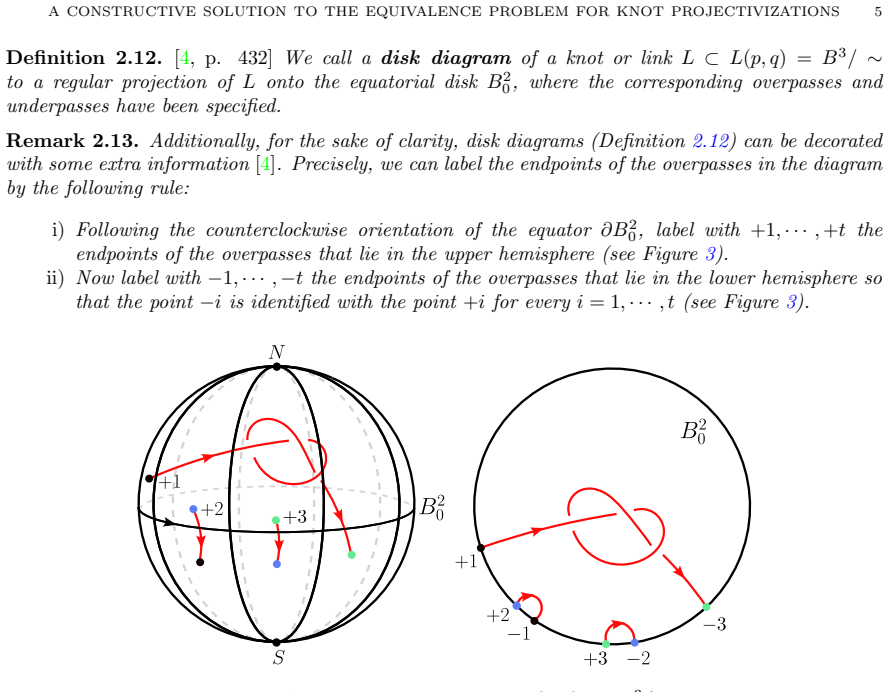
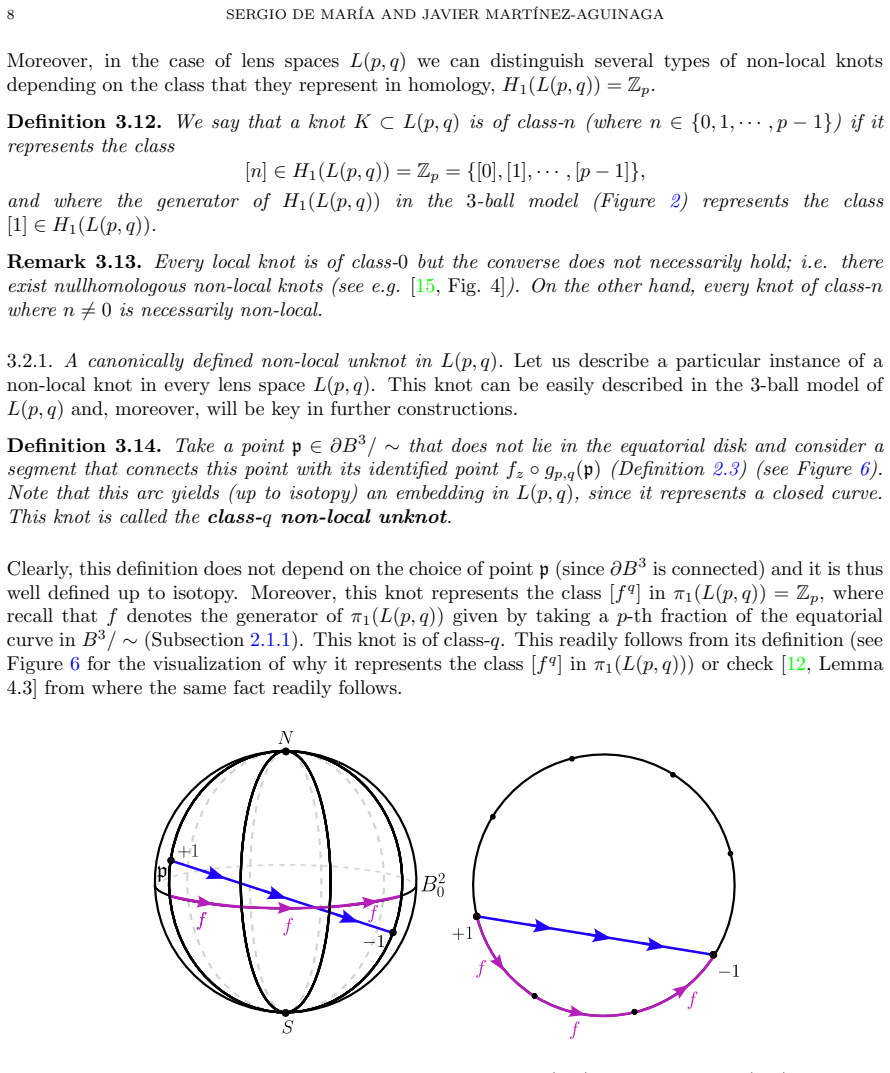
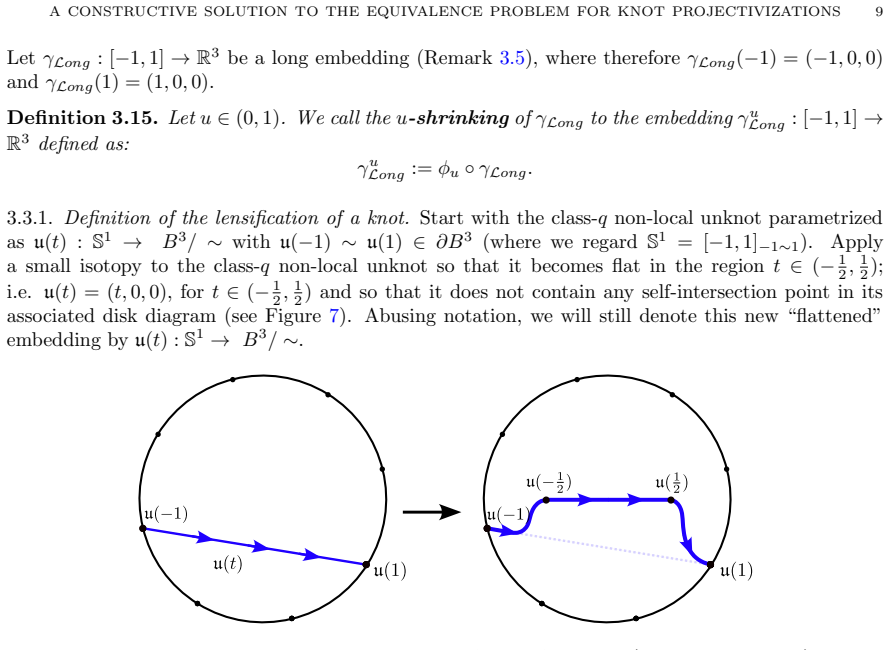
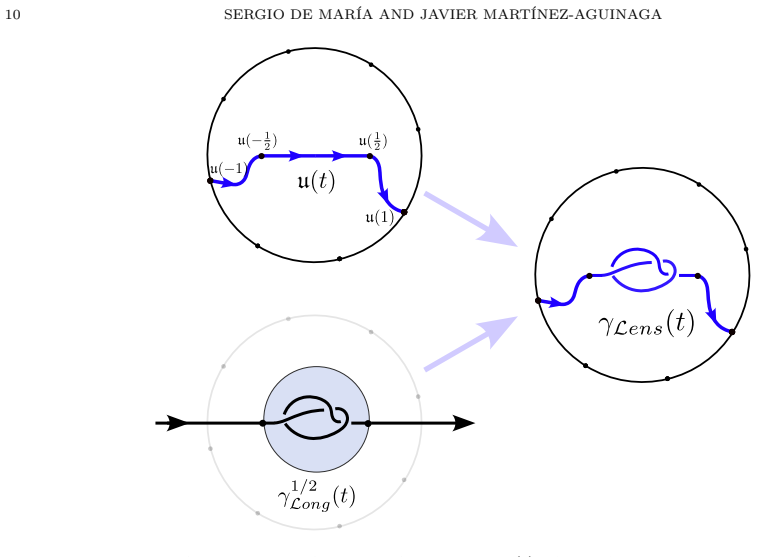
The problem of whether different projectivizations of the same affine knot $K\subset\mathbb{S}^3$ are equivalent in $\mathbb{R}\mathbb{P}^3$ can be found in [11] and has also been posed as an open question in [15]. In this note we provide a constructive solution to the problem. In particular, we adapt an idea due to A. Hatcher developed in the realm of embedding spaces and we describe an algorithm that produces an explicit isotopy between any two given projectivizations of the same affine knot. More generally, we introduce the notion of lensification of a knot in any lens space $L(p,q)$ and describe an algorithm that works in that more general setting, of which $\mathbb{R}\mathbb{P}^3\simeq L(2,1)$ is a particular instance. Finally, we apply this algorithm to several pairs of knots from the literature for which the equivalence problem was raised as an open question, finding explicit isotopies.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to resolve the open equivalence problem for projectivizations of affine knots in RP^3 (and more generally lens spaces L(p,q)) by adapting Hatcher's embedding-space stratification techniques. It describes a step-by-step algorithm that, given two equivalent projectivizations, explicitly constructs an isotopy between them, proves termination via finite complexity of the stratification, and applies the procedure to several concrete pairs of knots previously raised as open questions in the literature.
Significance. If the adaptation and termination argument hold, the work converts a non-constructive existence question into a practical, explicit algorithm with verifiable outputs. This is valuable for knot theory in non-simply-connected 3-manifolds, supplies concrete isotopies for previously unresolved cases, and extends naturally from RP^3 to general L(p,q). The constructive nature and example computations strengthen the result beyond a pure existence proof.
minor comments (3)
- The abstract cites references [11] and [15] for the open-question status; the manuscript should ensure the bibliography is complete, correctly formatted, and includes full details for these and any other cited works on Hatcher's techniques or lens-space knots.
- In the section describing the algorithm and its application to examples, adding a brief pseudocode outline or numbered step summary would improve readability and make the termination argument easier to follow without altering the technical content.
- The discussion of lensification in general L(p,q) would benefit from one additional sentence clarifying how the stratification complexity bound scales with p and q, even if the argument is already implicit in the finite-complexity claim.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation of minor revision. No specific major comments were raised in the report.
Circularity Check
No significant circularity; derivation is self-contained constructive adaptation
full rationale
The paper's core contribution is an explicit algorithm obtained by adapting Hatcher's embedding-space stratification techniques to knot projectivizations in RP^3 and lens spaces L(p,q). This adaptation is presented as a direct, step-by-step constructive procedure whose termination follows from the finite complexity of the stratification; no equations, fitted parameters, or self-definitional reductions appear. The cited prior works ([11], [15]) only pose the open question and do not supply load-bearing premises for the algorithm itself. Hatcher is an external source, and the manuscript supplies independent verification via examples. The derivation therefore stands on its own without reducing to its inputs by construction.
Axiom & Free-Parameter Ledger
axioms (2)
- standard math A knot is a smooth embedding of the circle S^1 into the 3-sphere S^3.
- standard math Two embeddings are equivalent if there exists a continuous path of embeddings connecting them (an isotopy).
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclearRP^3 ≃ L(2,1) ... lensification of a knot in any lens space L(p,q)
Reference graph
Works this paper leans on
-
[1]
R. Budney. A family of embedding spaces.Geometry & Topology, 13:41–83, 2008
2008
-
[2]
Budney and F
R. Budney and F. Cohen. On the homology of the space of knots.Geometry & Topology, 13, 2009
2009
-
[3]
Cattabriga and E
A. Cattabriga and E. Manfredi. Diffeomorphic vs isotopic links in lens spaces.Mediterranean Journal of Mathematics, 15:172, 2018
2018
-
[4]
Cattabriga, E
A. Cattabriga, E. Manfredi, and M. Mulazzani. On knots and links in lens spaces.Topology and its Applications, 160(2):430–442, 2013
2013
-
[5]
Y. V. Drobotukhina. An analogue of the Jones polynomial for links inRP 3 and a generalization of the Kauffman–Murasugi theorem.Algebra i Analiz, 2(3):171–191, 1990
1990
-
[6]
Fiedler.Polynomial One-cocycles for knots and Closed braids, volume 64 ofSeries on Knots and Everything
T. Fiedler.Polynomial One-cocycles for knots and Closed braids, volume 64 ofSeries on Knots and Everything. World Scientific, 2019
2019
-
[7]
R. H. Fox. Rolling.Bulletin of the American Mathematical Society, 72:162–164, 1966
1966
-
[8]
A. Hatcher. Topological moduli spaces of knots.https://pi.math.cornell.edu/ ~hatcher/Papers/knotspaces. pdf, 2002
2002
-
[9]
Havens and R
A. Havens and R. Koytcheff. Spaces of knots in the solid torus, knots in the thickened torus, and links in the 3-sphere.Geometriae Dedicata, 214:671–737, 2021
2021
-
[10]
Kanou and K
S. Kanou and K. Sakai. The Fox-Hatcher cycle and a Vassiliev invariant of order three.Pacific Journal of Mathematics, 323(2):281–306, 2023
2023
-
[11]
L. H. Kauffman, R. Mishra, and V. Narayanan. Knots inRP 3.Topology and its Applications, 377:109656, 2026
2026
-
[12]
Manfredi.Knots and Links in Lens Spaces: Tesi Di Dottorato
E. Manfredi.Knots and Links in Lens Spaces: Tesi Di Dottorato. PhD thesis, E. Manfredi, 2014
2014
-
[13]
C. Manolescu and M. Willis. A Rasmussen Invariant for Links inRP 3.Preprint. arXiv:2301.09764, 2023
-
[14]
Mishra and V
R. Mishra and V. Narayanan. Geometry of knots in real projective 3-space.Journal of Knot Theory and Its Ramifications, 32(10):2350068, 2023
2023
-
[15]
Narayanan
V. Narayanan. Virtual knots and projective knot homology. InProceedings of the International Conference on Knots, Quivers and Beyond (ICKQB 2025), pages 89–104. Atlantis Press, 2025
2025
-
[16]
Rolfsen.Knots and Links
D. Rolfsen.Knots and Links. American Mathematical Society, Providence, Rhode Island, 2003. AMS Chelsea Publishing
2003
-
[17]
Viro and J
O. Viro and J. Viro. Fundamental group in the projective knot theory.Topology and Geometry: A Collection of Essays Dedicated to Vladimir G. Turaev, 2021. Universidad Complutense de Madrid, Departamento de ´Algebra, Geometr ´ıa y Topolog ´ıa, Facultad de Ciencias Matem´aticas. 28040, Madrid, Spain. Email address:sergiodm@ucm.es Universidad Complutense de M...
2021
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.