Recognition: 2 theorem links
· Lean TheoremMulti-Agent Motion Planning for Simultaneous Arrival using Time-Reversed Search and Distributed Optimal Control
Pith reviewed 2026-05-08 19:25 UTC · model grok-4.3
The pith
For agents starting at rest, a backward multi-agent search followed by distributed optimal control produces optimized simultaneous-arrival trajectories.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
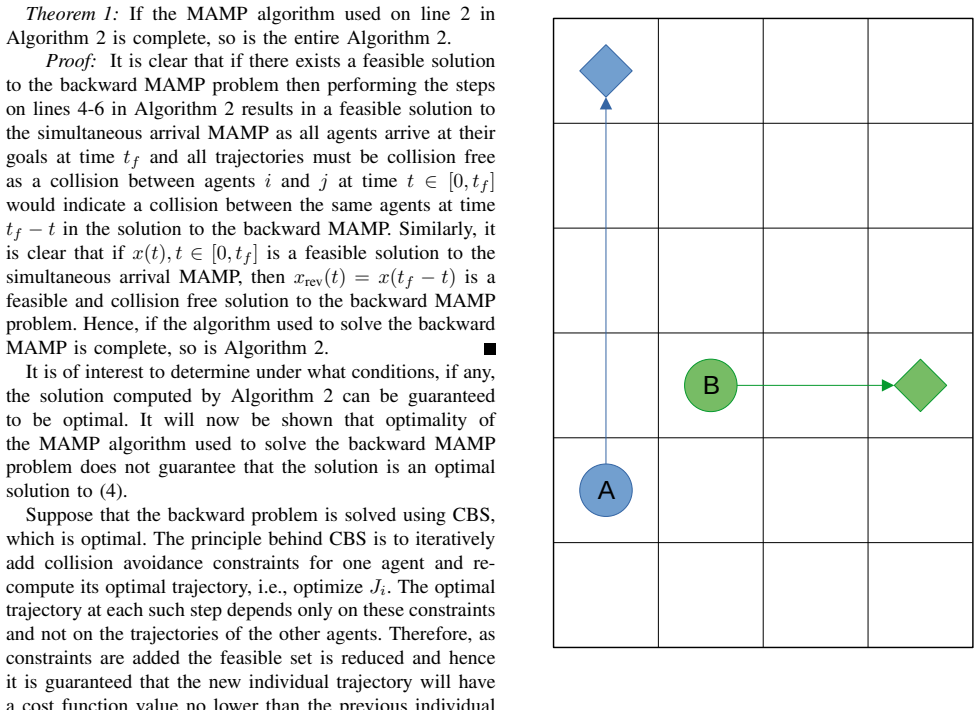
By running conflict-based search and safe-interval path planning with interval projection backward from the goals, the authors obtain a complete initial feasible solution for simultaneous arrival under zero initial velocity, together with necessary conditions for optimality of that solution. The initial plan initializes a receding-horizon optimal control problem whose solution is obtained in a distributed manner via the nonlinear alternating direction method of multipliers, yielding trajectories that remain collision-free and kinematically feasible while satisfying the exact common arrival time.
What carries the argument
Time-reversed application of conflict-based search combined with safe interval path planning and interval projection, followed by warm-started distributed nonlinear ADMM optimization of a receding-horizon optimal control problem.
If this is right
- The backward algorithm is complete for finding feasible collision-free simultaneous-arrival plans under rest initial conditions.
- Necessary conditions supplied in the paper identify cases where the initial backward solution is also optimal.
- The improvement step using the receding-horizon OCP raises solution quality beyond the initial feasible plan.
- Solving the optimal control problem distributively with nonlinear ADMM shortens computation time relative to a centralized solver.
- The resulting trajectories satisfy kinematic feasibility for car-like vehicle models.
Where Pith is reading between the lines
- The approach could support synchronized tasks such as formation control or coordinated docking where exact timing matters.
- Adapting the time-reversal technique to agents that already have nonzero initial velocities would require modifications to the search and projection steps.
- Distributed solving may enable deployment on larger teams of agents than centralized methods allow in real-time settings.
- Hardware experiments would reveal whether model mismatch between the kinematic assumptions and actual vehicle dynamics affects the simultaneous-arrival guarantee.
Load-bearing premise
The backward search must produce a sufficiently high-quality feasible warm-start so that the distributed nonlinear ADMM solver converges to an improved solution in reasonable time while the kinematic and collision constraints remain valid under the simultaneous-arrival requirement.
What would settle it
A set of resting-agent configurations for which the backward search returns no feasible simultaneous-arrival plan even though such plans are known to exist, or for which the NADMM refinement step fails to converge or improve the objective, would show that the two-step procedure does not reliably deliver optimized feasible solutions.
Figures





read the original abstract
In this work we consider the multi-agent motion planning (MAMP) problem with the constraint that agents arrive at their respective goals at the same time. For the special case where all agents are initially at rest we propose a two-step method for finding optimized and kinematically feasible solutions. The first step finds an initial feasible solution by applying a state-of-the-art MAMP algorithm (conflict-based search and safe interval path planning with interval projection) backward. The algorithm is complete, and we provide necessary conditions for when it is also optimal. The second step is an improvement step where a receding-horizon optimal control problem (OCP) is posed and the solution found in the first step is used to warm-start the solver. To improve scalability we propose to solve the OCP in a distributed manner using the nonlinear alternating direction method of multipliers (NADMM). We evaluate the proposed framework in numerical experiments on a car-like vehicle. The results show that the backward planning algorithm successfully finds feasible and collision-free solutions, and that the improvement step further improves the quality of the solutions. Compared to solving the OCPs in a centralized manner, using nonlinear ADMM reduces the computation time.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper addresses the multi-agent motion planning (MAMP) problem subject to a simultaneous-arrival constraint. For agents initially at rest, it proposes a two-step procedure: (1) a backward application of conflict-based search (CBS) and safe-interval path planning (SIPP) with interval projection to obtain an initial feasible, collision-free, kinematically valid trajectory set (claimed complete, with necessary optimality conditions supplied); (2) a receding-horizon optimal control problem (OCP) that refines the trajectories while enforcing simultaneous arrival, solved distributively via nonlinear ADMM (NADMM) using the backward solution as warm-start. Numerical experiments on car-like vehicles are reported to confirm feasibility of the backward step, quality improvement from the OCP step, and wall-clock speedup of the distributed solver relative to a centralized formulation.
Significance. If the two-step method reliably produces kinematically feasible trajectories that satisfy simultaneous arrival and improve upon the initial feasible solution, the work would offer a practical route to scalable coordinated planning for teams of non-holonomic agents. The combination of time-reversed discrete search for feasibility with distributed continuous optimization is a clear strength, as is the explicit completeness statement and necessary optimality conditions for the backward phase. The reported computational advantage of NADMM over centralized solving addresses a key scalability bottleneck in multi-agent optimal control.
major comments (2)
- [distributed optimal control / NADMM section] The claim that the improvement step yields optimized solutions rests on the assumption that the non-convex NADMM iterations converge from the backward-search warm-start to a feasible point satisfying the simultaneous-arrival terminal constraint and improving the objective. No convergence analysis, KKT stationarity conditions, contraction arguments, or even empirical iteration counts / failure rates are supplied for this non-convex distributed OCP; only wall-clock time reduction versus a centralized solver is reported. This is load-bearing for the central 'optimized and kinematically feasible' claim.
- [numerical experiments] The numerical experiments section asserts that the backward algorithm finds feasible collision-free solutions and that the improvement step further improves quality, yet no quantitative metrics (objective values before/after, exact runtimes, success rates, or kinematic error bounds), environment parameters, or trial statistics are provided. Without these data the practical performance claims and the warm-start quality assumption cannot be assessed.
minor comments (2)
- [abstract] The abstract states 'positive numerical results' without any numbers; adding at least summary statistics (e.g., average improvement in cost or time) would improve clarity.
- [notation and problem formulation] Notation for the common arrival time, the distributed decision variables, and the receding-horizon window should be introduced once and used consistently across the backward-search and OCP sections.
Simulated Author's Rebuttal
We thank the referee for the constructive comments, which highlight important aspects of the NADMM convergence and experimental reporting. We address each major comment below and indicate the revisions that will be incorporated.
read point-by-point responses
-
Referee: [distributed optimal control / NADMM section] The claim that the improvement step yields optimized solutions rests on the assumption that the non-convex NADMM iterations converge from the backward-search warm-start to a feasible point satisfying the simultaneous-arrival terminal constraint and improving the objective. No convergence analysis, KKT stationarity conditions, contraction arguments, or even empirical iteration counts / failure rates are supplied for this non-convex distributed OCP; only wall-clock time reduction versus a centralized solver is reported. This is load-bearing for the central 'optimized and kinematically feasible' claim.
Authors: We agree that the non-convex nature of the distributed OCP precludes straightforward theoretical convergence guarantees, and the manuscript does not provide KKT conditions or contraction arguments. The approach relies on the feasible warm-start from the backward search to produce local improvements in practice. We will revise the manuscript to include a new subsection with empirical convergence data from the reported trials, including average NADMM iteration counts, observed success rates, and objective improvement statistics. This supports the practical utility of the warm-start without overstating theoretical properties. revision: partial
-
Referee: [numerical experiments] The numerical experiments section asserts that the backward algorithm finds feasible collision-free solutions and that the improvement step further improves quality, yet no quantitative metrics (objective values before/after, exact runtimes, success rates, or kinematic error bounds), environment parameters, or trial statistics are provided. Without these data the practical performance claims and the warm-start quality assumption cannot be assessed.
Authors: We acknowledge that the numerical experiments section would benefit from more detailed quantitative reporting. While the manuscript includes timing comparisons and qualitative results, we will expand it with tables listing before-and-after objective values, exact runtimes for centralized versus distributed solvers, success rates across all trials, kinematic error bounds, environment parameters, and trial statistics. These additions will directly address the assessability of the performance claims. revision: yes
Circularity Check
No circularity; method combines external MAMP algorithms with standard receding-horizon OCP and NADMM.
full rationale
The derivation chain consists of (1) invoking a complete external state-of-the-art backward MAMP procedure (CBS + SIP with interval projection) whose completeness and necessary optimality conditions are stated by reference to prior literature, and (2) formulating a receding-horizon OCP whose solution is obtained by the standard nonlinear ADMM algorithm, warm-started by the feasible trajectory from step 1. Neither step reduces to its own inputs by definition, fitted-parameter renaming, or a self-citation chain whose cited result itself depends on the present claim. No uniqueness theorems, ansatzes, or empirical patterns are smuggled in via self-reference. The paper therefore remains self-contained against external benchmarks and reports only empirical improvement on car-like instances.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
Cost.FunctionalEquation / Cost (J(x)=½(x+x⁻¹)−1)washburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
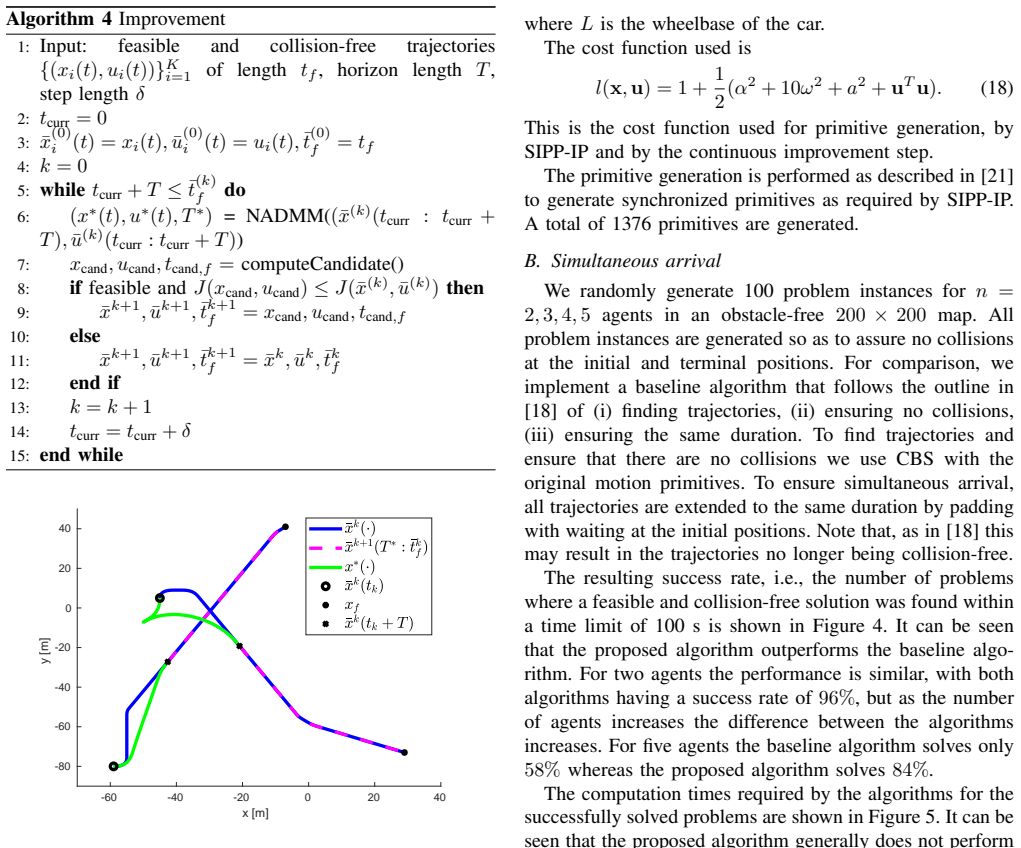
minimize J=Σ Ji, Ji=∫ l(x,u) dt; l(x,u)=1+½(α²+10ω²+a²+uᵀu)
-
Foundation.Atomicity (precedence/serialization on finite event sets)atomic_tick unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Two-step method: time-reversed CBS+SIPP-IP, then receding-horizon NADMM-based distributed OCP improvement.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Conflict-based search for optimal multi-agent pathfinding,
G. Sharon, R. Stern, A. Felner, and N. R. Sturtevant, “Conflict-based search for optimal multi-agent pathfinding,”Artificial intelligence, vol. 219, pp. 40–66, 2015
2015
-
[2]
Parallel hierarchical composition conflict-based search for optimal multi-agent pathfind- ing,
H. Lee, J. Motes, M. Morales, and N. M. Amato, “Parallel hierarchical composition conflict-based search for optimal multi-agent pathfind- ing,”IEEE Robotics and Automation Letters, vol. 6, no. 4, pp. 7001– 7008, 2021
2021
-
[3]
ICBS: The improved conflict-based search algorithm for multi-agent pathfinding,
E. Boyarski, A. Felner, R. Stern, G. Sharon, O. Betzalel, D. Tolpin, and E. Shimony, “ICBS: The improved conflict-based search algorithm for multi-agent pathfinding,” inProceedings of the International Symposium on Combinatorial Search, vol. 6, pp. 223–225, 2015
2015
-
[4]
Searching with consistent prioritization for multi-agent path finding,
H. Ma, D. Harabor, P. J. Stuckey, J. Li, and S. Koenig, “Searching with consistent prioritization for multi-agent path finding,” inProceedings of the AAAI conference on artificial intelligence, vol. 33, pp. 7643– 7650, 2019
2019
-
[5]
A formal basis for the heuristic determination of minimum cost paths,
P. E. Hart, N. J. Nilsson, and B. Raphael, “A formal basis for the heuristic determination of minimum cost paths,”IEEE Transactions on Systems Science and Cybernetics, vol. 4, no. 2, pp. 100–107, 1968
1968
-
[6]
SIPP: Safe interval path planning for dynamic environments, au- thor=Phillips, Mike and Likhachev, Maxim,
“SIPP: Safe interval path planning for dynamic environments, au- thor=Phillips, Mike and Likhachev, Maxim,” in2011 IEEE interna- tional conference on robotics and automation, pp. 5628–5635, IEEE, 2011
2011
-
[7]
CL-MAPF: Multi-agent path finding for car-like robots with kinematic and spatiotemporal constraints,
L. Wen, Y . Liu, and H. Li, “CL-MAPF: Multi-agent path finding for car-like robots with kinematic and spatiotemporal constraints,” Robotics and Autonomous Systems, vol. 150, p. 103997, 2022
2022
-
[8]
Conflict-based search for multi-robot motion planning with kinodynamic constraints,
J. Kottinger, S. Almagor, and M. Lahijanian, “Conflict-based search for multi-robot motion planning with kinodynamic constraints,” in2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), pp. 13494–13499, IEEE, 2022
2022
-
[9]
Multi-agent motion planning with B ´ezier curve optimization under kinodynamic constraints,
J. Yan and J. Li, “Multi-agent motion planning with B ´ezier curve optimization under kinodynamic constraints,”IEEE Robotics and Automation Letters, vol. 9, no. 3, pp. 3021–3028, 2024
2024
-
[10]
DB- CBS: Discontinuity-bounded conflict-based search for multi-robot kin- odynamic motion planning,
A. Moldagalieva, J. Ortiz-Haro, M. Toussaint, and W. H ¨onig, “DB- CBS: Discontinuity-bounded conflict-based search for multi-robot kin- odynamic motion planning,” in2024 IEEE International Conference on Robotics and Automation (ICRA), pp. 14569–14575, IEEE, 2024
2024
-
[11]
Collaborative Motion Planning for Multiple Tractor-Trailer Vehicles Based on Local Conflict Search and Priority Game Inheritance,
L. Su, M. Yue, X. Sun, H. Wang, and X. Zhao, “Collaborative Motion Planning for Multiple Tractor-Trailer Vehicles Based on Local Conflict Search and Priority Game Inheritance,”IEEE Robotics and Automation Letters, 2025
2025
-
[12]
Safe interval path planning with kinody- namic constraints,
Z. A. Ali and K. Yakovlev, “Safe interval path planning with kinody- namic constraints,” inProceedings of the AAAI conference on artificial intelligence, vol. 37, pp. 12330–12337, 2023
2023
-
[13]
Multi-agent Path Planning for Simultaneous Arrival Based on Conflict-Based Search,
H. Jiang, G. Liu, and R. Zhou, “Multi-agent Path Planning for Simultaneous Arrival Based on Conflict-Based Search,” inInterna- tional Conference on Guidance, Navigation and Control, pp. 359–369, Springer, 2024
2024
-
[14]
Multi-aircraft path planning method based on cooperative search A-star algorithm,
H. Su, H. Yun, J. He, F. Zhang, and Y . Wang, “Multi-aircraft path planning method based on cooperative search A-star algorithm,” in 2019 IEEE International Conference on Unmanned Systems (ICUS), pp. 267–272, IEEE, 2019
2019
-
[15]
Collaborative path planning of multi-unmanned surface vehicles via multi-stage constrained multi- objective optimization,
S. Yin, N. Xu, Z. Shi, and Z. Xiang, “Collaborative path planning of multi-unmanned surface vehicles via multi-stage constrained multi- objective optimization,”Advanced Engineering Informatics, vol. 65, p. 103115, 2025
2025
-
[16]
Efficient Trajectory Planning for Coordinated Arrival of Fixed-Wing UA V Swarm,
Y . Zhong, Y . Hu, Y . Chen, N. He, G. Xu, C. Xu, and F. Gao, “Efficient Trajectory Planning for Coordinated Arrival of Fixed-Wing UA V Swarm,” inInternational Conference on Intelligent Robotics and Applications, pp. 414–426, Springer, 2023
2023
-
[17]
Cooperative path planning of multi-missiles,
Y . Gao-yang, Z. Shao-lei, and Y . Shi, “Cooperative path planning of multi-missiles,” inProceedings of 2014 IEEE Chinese Guidance, Navigation and Control Conference, pp. 767–772, IEEE, 2014
2014
-
[18]
Co- operative path planning of multiple UA Vs using Dubins paths with clothoid arcs,
M. Shanmugavel, A. Tsourdos, B. White, and R. ˙Zbikowski, “Co- operative path planning of multiple UA Vs using Dubins paths with clothoid arcs,”Control engineering practice, vol. 18, no. 9, pp. 1084– 1092, 2010
2010
-
[19]
Coordinated target assignment and UA V path planning with timing constraints,
L. Babel, “Coordinated target assignment and UA V path planning with timing constraints,”Journal of Intelligent & Robotic Systems, vol. 94, no. 3, pp. 857–869, 2019
2019
-
[20]
An optimization-based receding horizon trajectory planning algorithm,
K. Bergman, O. Ljungqvist, T. Glad, and D. Axehill, “An optimization-based receding horizon trajectory planning algorithm,” IFAC-PapersOnLine, vol. 53, no. 2, pp. 15550–15557, 2020
2020
-
[21]
Optimized and kine- matically feasible multi-agent motion planning,
A. Hellander, K. Bergman, and D. Axehill, “Optimized and kine- matically feasible multi-agent motion planning,”DiVA preprint urn:nbn:se:liu:diva-223455, 2026
2026
-
[22]
Improved path planning by tightly combining lattice-based path planning and optimal control,
K. Bergman, O. Ljungqvist, and D. Axehill, “Improved path planning by tightly combining lattice-based path planning and optimal control,” IEEE Transactions on Intelligent Vehicles, vol. 6, no. 1, pp. 57–66, 2020
2020
-
[23]
A survey of distributed optimization,
T. Yang, X. Yi, J. Wu, Y . Yuan, D. Wu, Z. Meng, Y . Hong, H. Wang, Z. Lin, and K. H. Johansson, “A survey of distributed optimization,” Annual Reviews in Control, vol. 47, pp. 278–305, 2019
2019
-
[24]
arXiv preprint arXiv:2103.12840 , year=
T. Halsted, O. Shorinwa, J. Yu, and M. Schwager, “A survey of dis- tributed optimization methods for multi-robot systems,”arXiv preprint arXiv:2103.12840, 2021
-
[25]
Distributed nonlinear trajectory optimization for multi-robot motion planning,
L. Ferranti, L. Lyons, R. R. Negenborn, T. Keviczky, and J. Alonso- Mora, “Distributed nonlinear trajectory optimization for multi-robot motion planning,”IEEE Transactions on Control Systems Technology, vol. 31, no. 2, pp. 809–824, 2022
2022
-
[26]
Parallel distributed collision avoidance with intention consensus based on ADMM,
H. A. Tran, T. A. Johansen, and R. R. Negenborn, “Parallel distributed collision avoidance with intention consensus based on ADMM,”IFAC- PapersOnLine, vol. 58, no. 10, pp. 302–309, 2024
2024
-
[27]
Douglas–Rachford splitting and ADMM for nonconvex optimization: Tight convergence results,
A. Themelis and P. Patrinos, “Douglas–Rachford splitting and ADMM for nonconvex optimization: Tight convergence results,”SIAM Journal on Optimization, vol. 30, no. 1, pp. 149–181, 2020
2020
-
[28]
Distributed optimization and statistical learning via the alternating direction method of multipliers,
S. Boyd, N. Parikh, E. Chu, B. Peleato, and J. Eckstein, “Distributed optimization and statistical learning via the alternating direction method of multipliers,”Machine Learning, vol. 3, no. 1, pp. 1–122, 2010
2010
-
[29]
CasADi: a software framework for nonlinear optimization and opti- mal control,
J. A. Andersson, J. Gillis, G. Horn, J. B. Rawlings, and M. Diehl, “CasADi: a software framework for nonlinear optimization and opti- mal control,”Mathematical Programming Computation, vol. 11, pp. 1– 36, 2019
2019
-
[30]
On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,
A. W ¨achter and L. T. Biegler, “On the implementation of an interior- point filter line-search algorithm for large-scale nonlinear program- ming,”Mathematical programming, vol. 106, pp. 25–57, 2006
2006
-
[31]
S. M. LaValle,Planning algorithms. Cambridge university press, 2006
2006
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.