Recognition: 2 theorem links
NORA: A Harness-Engineered Autonomous Research Agent for End-to-End Spatial Data Science
Pith reviewed 2026-05-08 19:05 UTC · model grok-4.3
The pith
A harness-engineered multi-agent system automates complete spatial data science research workflows.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
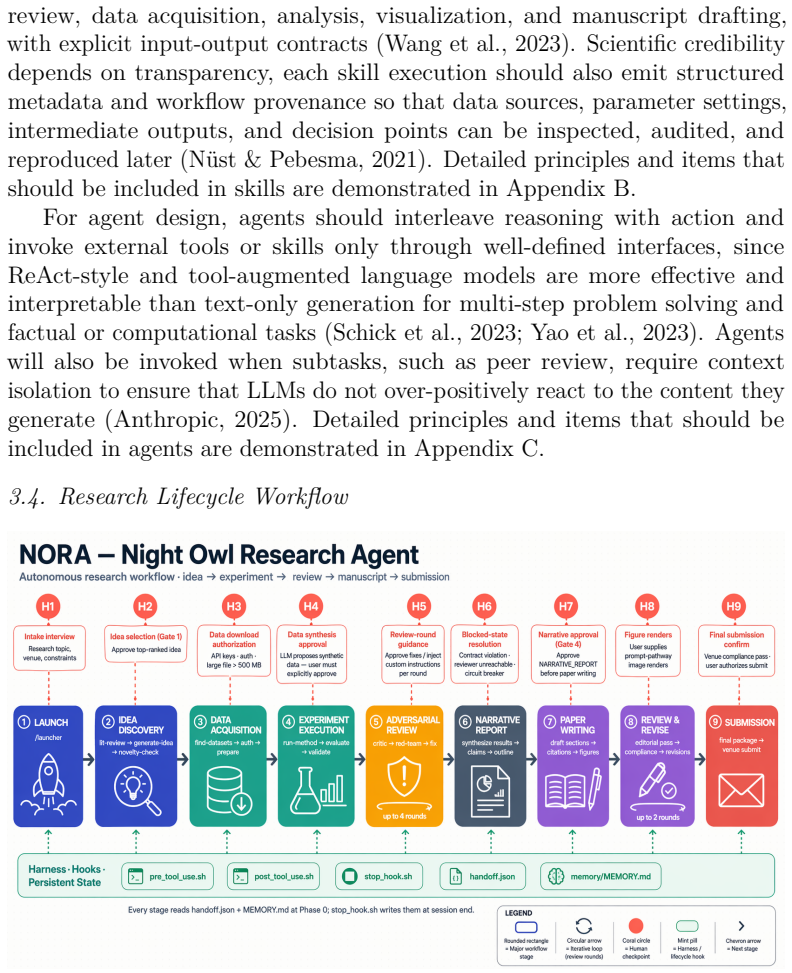
NORA orchestrates the complete research lifecycle in spatial data science using a skills-first architecture of 21 domain-specialized workflow skills, 9 specialist sub-agents, and custom servers. Two key skills handle spatial analysis decision frameworks for exploratory data analysis, regression, and diagnostics, plus reproducible data downloads from authoritative sources. Harness engineering is formalized through lifecycle hooks, safety gates, generator-evaluator separation, human-in-the-loop elements, and state persistence to ensure reliability and reproducibility. Evaluations by domain specialists and reviewers across seven dimensions show that this approach substantially improves the time
What carries the argument
Harness engineering, the integration of lifecycle hooks, safety gates, generator-evaluator separation, human-in-the-loop, and state persistence to support domain-specialized skills in multi-agent systems for reliable research.
If this is right
- Complete spatial research tasks including data download, exploratory analysis, regression modeling, and diagnostics can be performed autonomously.
- Reproducible workflows become possible through persistent state and safety mechanisms in agent design.
- Research quality metrics such as novelty, rigor, and efficiency increase when agents are tailored to the domain.
- General agents lack the necessary specialized reasoning for rigorous spatial science applications.
Where Pith is reading between the lines
- Similar harness designs could be adapted for other scientific fields by developing domain-specific skill sets.
- Over time, such systems might reduce the need for large human research teams in routine data analysis tasks.
- Testing NORA on larger, real-world projects would reveal scalability limits not covered in the initial case studies.
Load-bearing premise
The case studies conducted by domain specialists and LLM reviewers across seven dimensions provide a valid and unbiased measure of NORA's performance in autonomous end-to-end spatial research.
What would settle it
A controlled experiment comparing NORA against a general-purpose agent on identical spatial research tasks, measuring time to completion, output quality, and error rates, with no observed advantage for NORA.
Figures



read the original abstract
The automation of scientific research workflows has emerged as a transformative frontier in artificial intelligence, yet existing autonomous research agents remain largely domain-agnostic, lacking the specialized reasoning, method selection, and data acquisition capabilities required for rigorous spatial data science. This paper introduces NORA (Night Owl Research Agent), a harness-engineered, multi-agent autonomous research system purpose-built for GIScience and spatial data science. NORA orchestrates the complete research lifecycle through a skills-first architecture comprising 21 domain-specialized workflow skills, 9 specialist sub-agents, and custom Model Context Protocol (MCP) servers. Central to the system's design are two novel domain-specialized skills: a spatial analysis skill unit that encodes decision frameworks for exploratory spatial data analysis, spatial regression, and diagnostics; and a spatial data download skill that supports reproducible acquisition from authoritative geospatial data sources. We formalize the concept of harness engineering for scientific research agents, demonstrating how lifecycle hooks, safety gates, generator-evaluator separation, human-in-the-loop, and state persistence ensure reliable and reproducible autonomous research. We evaluate NORA through case studies by 6 domain specialists and 3 LLM reviewers across seven dimensions (novelty, quality, rigor, etc). Results demonstrate that domain-specialized harness engineering substantially improves the efficiency and quality of research output compared to general-purpose agent configurations.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces NORA, a harness-engineered multi-agent autonomous research system for end-to-end spatial data science and GIScience. It features a skills-first architecture with 21 domain-specialized workflow skills, 9 specialist sub-agents, and custom MCP servers, including novel components for spatial analysis (encoding decision frameworks for ESDA, spatial regression, and diagnostics) and reproducible spatial data download from authoritative sources. The authors formalize harness engineering via lifecycle hooks, safety gates, generator-evaluator separation, human-in-the-loop mechanisms, and state persistence. Evaluation consists of case studies assessed by 6 domain specialists and 3 LLM reviewers across seven dimensions (novelty, quality, rigor, etc.), with the claim that domain-specialized harness engineering substantially improves efficiency and quality versus general-purpose agent configurations.
Significance. If supported by rigorous evidence, the formalization of harness engineering and the domain-specific skills for spatial workflows could provide a valuable template for building reliable autonomous research agents in data-intensive scientific domains. The emphasis on reproducibility mechanisms and the skills-first design address real limitations in general-purpose agents. However, the absence of quantitative metrics, controlled baselines, or objective performance data in the reported evaluation substantially weakens the potential contribution at present.
major comments (2)
- [Evaluation] Evaluation section: The central claim of 'substantial improvement' in efficiency and quality rests on case studies scored by 6 domain specialists and 3 LLM reviewers across seven dimensions, yet no quantitative metrics (e.g., wall-clock time, success fractions, error rates), parallel runs against matched general-purpose baselines on identical tasks, blinding procedures, or inter-rater reliability statistics are provided. This leaves the improvement indistinguishable from reviewer bias or prompt differences rather than the harness itself.
- [Abstract and Introduction] Abstract and §1: The assertion that 'domain-specialized harness engineering substantially improves the efficiency and quality of research output' is presented as a demonstrated result, but the evaluation protocol supplies only subjective specialist and LLM reviews without objective, reproducible measures or falsifiable comparisons, undermining the load-bearing empirical support for the paper's primary contribution.
minor comments (2)
- [System Architecture] The description of the 21 workflow skills and 9 sub-agents would benefit from a table or explicit enumeration to clarify their division of labor and interactions.
- [System Design] Clarify the exact definition and implementation details of the Model Context Protocol (MCP) servers and how they integrate with the harness components.
Simulated Author's Rebuttal
We thank the referee for their constructive feedback, which highlights both the potential value of our harness-engineering approach and the need for stronger empirical grounding in the evaluation. We address each major comment below and describe the revisions we will undertake.
read point-by-point responses
-
Referee: [Evaluation] Evaluation section: The central claim of 'substantial improvement' in efficiency and quality rests on case studies scored by 6 domain specialists and 3 LLM reviewers across seven dimensions, yet no quantitative metrics (e.g., wall-clock time, success fractions, error rates), parallel runs against matched general-purpose baselines on identical tasks, blinding procedures, or inter-rater reliability statistics are provided. This leaves the improvement indistinguishable from reviewer bias or prompt differences rather than the harness itself.
Authors: We acknowledge that the evaluation relies primarily on expert and LLM judgments rather than quantitative performance indicators. Expert assessment is appropriate for judging research quality dimensions such as rigor and novelty, which are not easily reduced to error rates or wall-clock time. In the revised manuscript we will expand the Evaluation section to: (1) describe the exact protocol used for the general-purpose baseline comparisons, including the tasks, agent configurations, and output-matching procedure; (2) report any process-level metrics already collected (e.g., number of iterations or human interventions); and (3) include inter-rater reliability statistics computed from the existing reviews. We will also add an explicit limitations paragraph noting the absence of blinding and timing data. These additions will increase transparency while remaining within the scope of the existing case-study design. revision: partial
-
Referee: [Abstract and Introduction] Abstract and §1: The assertion that 'domain-specialized harness engineering substantially improves the efficiency and quality of research output' is presented as a demonstrated result, but the evaluation protocol supplies only subjective specialist and LLM reviews without objective, reproducible measures or falsifiable comparisons, undermining the load-bearing empirical support for the paper's primary contribution.
Authors: We agree that the current phrasing in the abstract and introduction presents the improvement as a settled finding. We will revise both sections to state that the case studies 'suggest' or 'indicate' improvements in efficiency and quality, with the supporting evidence and its limitations detailed in the Evaluation section. Stronger causal language will be moved to the Discussion, where it can be appropriately qualified. This adjustment will align the claims more closely with the nature of the evidence provided. revision: yes
Circularity Check
No circularity: claims rest on external case-study evaluation without self-referential reduction
full rationale
The paper contains no mathematical derivations, equations, or fitted parameters. Its central claim—that domain-specialized harness engineering improves research output—is supported by case studies evaluated by domain specialists and LLM reviewers across seven dimensions. This evaluation is presented as empirical evidence rather than a derivation that reduces to the system's own inputs or prior self-citations by construction. No self-definitional loops, uniqueness theorems, or ansatzes smuggled via citation appear in the provided text. The absence of controlled baselines or objective metrics is a limitation of evidence strength, not a circularity in the derivation chain itself.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Domain-specialized skills and sub-agents enable rigorous autonomous spatial data science
- ad hoc to paper Harness engineering features (lifecycle hooks, safety gates, human-in-the-loop) ensure reliable and reproducible research
invented entities (2)
-
NORA system
no independent evidence
-
Harness engineering
no independent evidence
Reference graph
Works this paper leans on
-
[1]
doi:10.21105/joss.02965. Wu, Q., Lane, C.R., 2017. Delineating wetland catchments and modeling hydrologic connectivity using lidar data and aerial imagery. Hydrology and Earth System Sciences 21, 3579–3595. doi:10.5194/hess-21-3579-2017. Wu, Q., Lane, C.R., Wang, L., Vanderhoof, M.K., Christensen, J.R., Liu, H., 2018. Efficient delineation of nested depre...
-
[2]
The AI Scientist-v2: Workshop-Level Automated Scientific Discovery via Agentic Tree Search
The AI scientist-v2: Workshop-level automated scientific discovery via agentic tree search. arXiv:2504.08066. doi:10.48550/arXiv.2504.08066. Yao, S., Zhao, J., Yu, D., Du, N., Shafran, I., Narasimhan, K., Cao, Y.,
work page internal anchor Pith review doi:10.48550/arxiv.2504.08066
-
[3]
ReAct: Synergizing Reasoning and Acting in Language Models
ReAct: Synergizing reasoning and acting in language models. arXiv:2210.03629. doi:10.48550/arXiv.2210.03629. Zhang, P., et al., 2025. GeoAnalystBench: Benchmarking spatial analysis with large language models. Pre-print. 34 Appendix A. Appendix A: NORA File System Design Principles NORA decomposes the research workflow into discrete skills that com- munica...
work page internal anchor Pith review doi:10.48550/arxiv.2210.03629 2025
-
[4]
md) or passed explicitly as the $ARGUMENTS payload at invocation time
Everything the agent needs must be fetchable from files(e.g., program.md, memory/paper-cache/, output/LIT_REVIEW_REPORT. md) or passed explicitly as the $ARGUMENTS payload at invocation time. 37
-
[5]
read back
Anything the agent produces must land in a canonical output pathbecause the parent has no way to “read back” the sub-context — only the final tool-return payload is visible. This is the architectural reason NORA is file-driven: agents are stateless and context-isolated by design, so persistent state must live on disk. Design failure without it.The agent s...
-
[6]
Inputs— what $ARGUMENTS must contain (keywords, section name, scoring rubric)
-
[7]
Files read— which disk paths are consulted (handoff.json, AP- PROVED_CLAIMS, paper-cache)
-
[8]
state spatial resolution for all raster data
Outputs— canonical file writesplusthe structured return payload the caller parses. Design failure without it.The caller receives freeform prose it cannot reliably parse, forcing an LLM re-read of the agent’s output to extract structure — wasting tokens and reintroducing the context pollution the agent was supposed to prevent. 39 Evaluator-vs-Producer Role...
-
[9]
If < 20 papers found: broaden keywords (add synonyms, relax year filter to 2015+) and retry
Future humans— a documented expectation when outputs need audit. Design failure without it.Output formats drift between invocations; parser regex and downstream skills break every time the agent’s phrasing shifts. Cold-Read Discipline (Evaluator Agents Only).For reviewer agents, an ex- plicit instruction to evaluate the artifact without the author’s frami...
2015
-
[10]
Codex MCP (gpt-5.4, xhigh reasoning) $\rightarrow$ quality: HIGH
-
[11]
Claude subagent (fresh context) $\rightarrow$ quality: MEDIUM
-
[12]
Self-review with structured rubric $\rightarrow$ quality: LOW (flag output) Why.The current “graceful degradation” pattern does not communicate quality loss. A pipeline that falls back from Codex MCP to self-review produces lower-quality output, but nothing downstream knows this. Ex- plicit quality annotations let downstream skills adjust their trust leve...
-
[13]
Disagreement-Calibrated FFE Intervals (10/10)←used as C2
-
[14]
Any-Vintage Rescue Voting (9/10)←used as C1
-
[15]
The recommended commitment is a**combined paper**that fuses rescue + UQ + 65 decision-loop
Foundation-Aware Coastal FFE Routing (9/10)←deferred to follow-up paper. The recommended commitment is a**combined paper**that fuses rescue + UQ + 65 decision-loop. Codex's novelty check found**no direct prior art**for any of the three primary claims. ## 4. Method refinement. _(See [output/refine-logs/FINAL_ PROPOSAL.md](refine-logs/FINAL_PROPOSAL.md), [R...
-
[16]
Group-imbalance tightens the spatial- autocorrelation lower bound on disparate impact: evidence from Atlanta tract-level crime
Document Status •Narrative version: v1.0 •Last updated: 2026-04-16 •Project codename: atl-crime-fairness • Active idea(from handoff.json):"Group-imbalance tightens the spatial- autocorrelation lower bound on disparate impact: evidence from Atlanta tract-level crime." •Target venue: IJGIS (primary); CEUS (secondary) •Manuscript type: Research Article • Pag...
2026
-
[17]
4.8×parsimony advantage over i.i.d
One-Paragraph Paper Summary Working Title Group-imbalance Tightens the Spatial-Autocorrelation Lower Bound on Disparate Impact: Evidence from Atlanta Tract-Level Crime One-Sentence Contribution We prove that for any place-based predictor, the disparate-impact gap across a spatially clustered protected group is lower-bounded by a product of residual Moran'...
2025
-
[18]
To prove a closed-form lower bound∆2≥(I·S0 / n)·κ·Var(r)·(1/n1 76 + 1/n0)2·(C_W)−1on the squared group-mean residual disparity for any place-based predictor
-
[19]
To establish and empirically verify Corollary 1 —the bound tightens monotonically with protected-group imbalance— on a 350-dataset Monte Carlo simulation
-
[20]
To test the bound on an Atlanta tract-level 7-model benchmark (OLS, XGBoost, SLM, SEM, GWR, MGWR, Spatial XGBoost) under 5-fold block-spatialcross-validation, witharace-in/race-outcovariateablation that breaks the tautology of using race composition as an input
-
[21]
local- bandwidth vs
To characterize the generalization behaviour of global linear vs. local- bandwidth vs. tree-based methods under strict spatial-block held-out evaluation. The remainder of the paper proceeds as follows. Section 2 surveys relevant work in classical spatial regression, spatial GNNs for crime, fairness audits, and spatial cross-validation. Section 3 states an...
2025
-
[22]
XGBoost— xgboost 3.2.0, n_estimators=20, max_depth=2, learn- ing_rate=0.1
-
[23]
Spatial Lag Model (SLM)— spreg.ML_Lag, maximum-likelihood estimation, rook W
-
[24]
Spatial Error Model (SEM)— spreg.ML_Error, maximum- likelihood, rook W
-
[25]
Geographically Weighted Regression (GWR)— mgwr.gwr.GWR with adaptive bi-square kernel; bandwidth selected by AICc
-
[26]
Multiscale GWR (MGWR)— mgwr.gwr.MGWR with per-variable bandwidth via backfitting (max 30 iterations); the classical-spatial- regression anchor. 82
-
[27]
Spatial XGBoost— XGBoost fit on the spatially-augmented feature matrix [X, W·X, W2·X], where W is the rook contiguity matrix; this is a non-linear, spatially-informed tree baseline that complements the linear lag/error and local-bandwidth methods. The rook contiguity graph is augmented by KNN(k=2) edges as needed to enforce a single connected component. T...
-
[28]
municipal-scale
showed that neglecting FFE uncertainty biases house-raising decisions under FEMA's BFE recommendations. No published pipeline uses GSV's multi-vintagecharacter — the same street typically has 4–8 capture years retrievable from Google's Time Machine — to attack either gap. Our contribution, in order of strength of evidence, is:. • C1 (primary). Coverage re...
2013
-
[29]
Rasmussen et al
showed that neglecting FFE uncertainty biases optimal house-elevation under FEMA's BFE. Rasmussen et al. (2019) [10] extended this to SLR deep uncertainty. These establishwhyUQ matters for downstream decisions; we provide theupstreamlink — per-parcel FFE uncertainty from image evidence. Lidar-based FFE uncertainty propagation.Bodoque et al. (2016)
2019
-
[30]
We do the analogous computation for a street-view-derived pipeline; our uncertainty source is cross-vintage disagreement, not raster elevation error
propagated lidar-DSM uncertainty through flood damage. We do the analogous computation for a street-view-derived pipeline; our uncertainty source is cross-vintage disagreement, not raster elevation error. Detection.We fix Gao's YOLOv5 [13] and benchmark against the open-vocabulary Grounding-DINO family [12] as a zero-shot baseline. Depth Anything V2 [17] ...
2022
-
[31]
Per-pano elevation is the decodedelevation_egm96_m field — used as ground reference for that pano
GSV panoramas + depthmaps + metadata.All retrievable vintages 2013+ per parcel via thegsv_pano library. Per-pano elevation is the decodedelevation_egm96_m field — used as ground reference for that pano. 10.Boundary.OSM Nominatim polygon for North Wildwood. 11.Buildings.1,078 OSM polygons clipped to the boundary
2013
-
[32]
FEMA NFHL.30 flood-zone polygons + 65 boundary lines via the FEMA ArcGIS REST API
-
[33]
Depth-damage.USACEEGM04-01genericresidentialcurves(1-story, no basement, A / V zones)
-
[34]
a door of a house. a front door of a house. an entrance door
Detector.Gao 2024 YOLOv5s checkpoint from the FFE_Texas repository; used as-is. Why North Wildwood.Three criteria: (i) dense historical GSV (boundary- driven pilot: 59 % of panos have≥3 vintages; mean 3.08, max 8; see Figure 3); (ii) unambiguous flood-hazard exposure (every parcel inside an SFHA); (iii) mixed barrier-island housing stock. Nearby Sea Isle,...
-
[35]
more parsimonious than Lindsay
and matches the default range parameter used by the WhiteboxTools baseline (Section 4.4); the matched value enables a like-for-like methodological- equivalence test. For computational efficiency at the5,627×7,189grid, the field is sampled via the randomized spectral method ofgstools.SRF on a coarse 30m grid (chosen so thatℓremains larger than two coarse p...
2020
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.