Recognition: 2 theorem links
Undirected Replacement Paths: Dual Fault Reduces to Single Source
Pith reviewed 2026-05-08 18:42 UTC · model grok-4.3
The pith
A tight reduction shows that undirected 2-fault replacement paths are no harder than single-source replacement paths.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The central discovery is a tight, weight-preserving reduction from undirected 2-FRP to undirected SSRP. This allows the best-known algorithms for SSRP to be applied to 2-FRP, yielding improved runtimes such as Õ(M n^ω) for bounded integer weights, n³/2^Ω(√log n) for polynomial weights, and Õ(m√n + n²) combinatorial time for unweighted graphs. The paper complements this with tight lower bounds under fine-grained hypotheses.
What carries the argument
The key machinery is a weight-preserving graph transformation that reduces queries about distances under any two edge failures to queries about single-edge-failure distances from a single source in a modified graph.
If this is right
- The reduction yields the first Õ(M n^ω) time algorithm for 2-FRP with weights in [1,M]
- It gives n³/2^Ω(√log n) time for 2-FRP with poly(n) weights
- Combinatorial Õ(m n^{1/2} + n²) time for unweighted 2-FRP
- Matching lower bounds under fine-grained hypotheses
Where Pith is reading between the lines
- The prior intuition that 2-FRP is harder than SSRP does not hold in undirected graphs
- The equivalence allows transferring all future improvements in SSRP algorithms directly to 2-FRP
Load-bearing premise
The graph modification in the reduction must accurately encode every possible pair of edge failures as some single edge failure in the new graph without changing the relevant distances.
What would settle it
A specific undirected graph and pair of edges where the distance under two failures computed directly differs from the distance obtained by applying the SSRP algorithm to the reduced instance.
Figures




read the original abstract
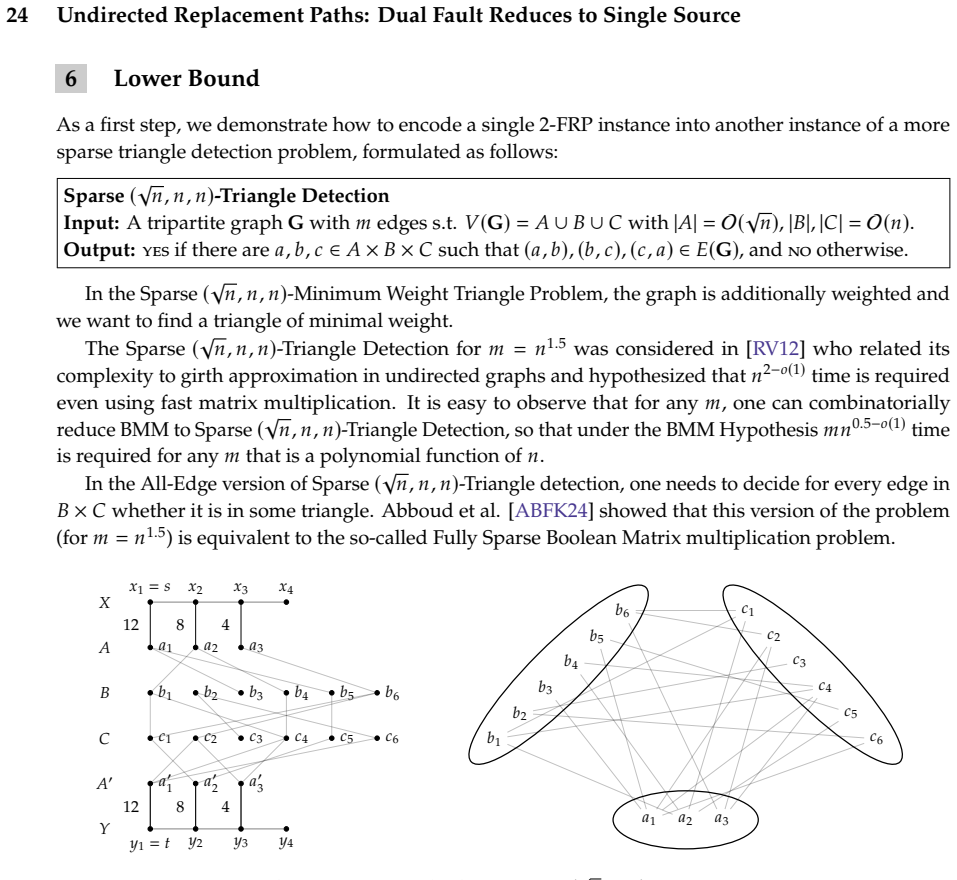
Given a graph and two fixed vertices $s$ and $t$, the Replacement Path Problem (RP) is to compute for every edge $e$, the distance between $s$ and $t$ when $e$ is removed. There are two natural extensions to RP: (1) Single Source Replacement Paths (SSRP): Given a graph $G$ and a source node $s$, compute for every vertex $v$ and every edge $e$ the $s$-$v$ distance in $G \setminus \{e\}$. That is, we do not fix the target anymore. (2) $2$-Fault Replacement Paths (2-FRP): Given a graph $G$ and two nodes $s$ and $t$, compute for every pair of edges $e, e'$ the $s$-$t$ distance in $G \setminus \{e, e'\}$. That is, we consider two failures instead of one. Previously, there was no known reduction between SSRP and 2-FRP. It seemed plausible that 2-FRP would be computationally harder because there are no settings where 2-FRP admits a faster algorithm than SSRP. In directed unweighted graphs there is a provable gap in complexity, and in undirected graphs many of the known 2-FRP algorithms in a variety of settings are much slower than those for SSRP in the same setting. The main contribution of this paper is a tight reduction from undirected $2$-FRP to undirected SSRP, showing that contrary to prior intuition, 2-FRP is not harder than SSRP. As our reduction is weight-preserving, we obtain the first algorithms for $2$-FRP that match the best-known runtimes for SSRP: (1) $\tilde{O}(M n^{\omega})$ for weights in $[1, M]$ [GVW19], improving upon $O(Mn^{2.87})$ [CZ24]; (2) $n^3/2^{\Omega(\sqrt{\log n})}$ for weights in $[1, \text{poly}(n)]$ [GVW19], improving over the previous $n^3\text{polylog}(n)$ running time [VWWX22]; (3) $\tilde{O}(mn^{1/2}+n^{2})$ combinatorial time for unweighted graphs [CC19], and more generally for rational weights in $[1, 2]$ [CM20], improving upon $\tilde{O}(n^{3-1/18})$ [CZ24]. We complement these upper bounds with tight lower bounds under fine-grained hypotheses.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper claims a tight, weight-preserving reduction from undirected 2-Fault Replacement Paths (2-FRP) to undirected Single-Source Replacement Paths (SSRP). This allows direct transfer of the best-known SSRP algorithms to 2-FRP, yielding improved runtimes such as Õ(M n^ω) for integer weights in [1,M], n^3/2^Ω(√log n) for polynomial weights, and Õ(m n^{1/2} + n^2) combinatorial time for unweighted/rational-[1,2] graphs. The result is complemented by matching conditional lower bounds under fine-grained hypotheses, showing 2-FRP is not harder than SSRP in undirected graphs.
Significance. If the reduction holds, the result is significant: it resolves an open question on the relative complexity of these problems by establishing equivalence (rather than a strict gap) in the undirected setting, contrary to intuition from directed graphs and prior 2-FRP algorithms. The weight-preserving property ensures exact distances are recovered without distortion, enabling the first matching upper bounds. Credit is due for the constructive mapping and the complementary lower bounds that establish tightness.
minor comments (2)
- Abstract: the listed SSRP runtimes (e.g., [GVW19], [CC19]) are cited without a one-sentence reminder of the precise SSRP problem variant they solve; adding this would help readers immediately see the transfer.
- The lower-bound section would benefit from an explicit statement of the fine-grained hypothesis used (e.g., APSP or 3SUM) and a short table comparing the new 2-FRP lower bounds to the SSRP ones they match.
Simulated Author's Rebuttal
We thank the referee for their positive assessment of the paper and for recommending acceptance. We appreciate the recognition of the significance of establishing equivalence between undirected 2-FRP and SSRP via a weight-preserving reduction.
Circularity Check
No significant circularity
full rationale
The paper's central contribution is an explicit, weight-preserving constructive reduction that maps any undirected 2-FRP instance to one or more undirected SSRP instances via a direct graph transformation. This equivalence is defined by the construction itself and does not rely on fitted parameters, self-referential definitions of distances, or load-bearing self-citations; the prior SSRP algorithms cited (e.g., GVW19) are external results whose runtimes are transferred only after the reduction is established. Lower bounds are complemented under standard fine-grained hypotheses and do not form part of the derivation chain for the upper bounds. The derivation is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Undirected graphs with non-negative edge weights admit shortest path computations via standard algorithms.
Reference graph
Works this paper leans on
-
[1]
The time complexity of fully sparse matrix multiplication
ABFK24 Amir Abboud, Karl Bringmann, Nick Fischer, and Marvin K¨unnemann. The time complexity of fully sparse matrix multiplication. InProceedings of the 2024 ACM-SIAM Symposium on Discrete Algorithms, SODA 2024, Alexandria, V A, USA, January 7-10, 2024, pages 4670–4703. SIAM,
2024
-
[2]
Association for Computing Machinery. doi: 10.1145/383962.383980. 4 BCFS21 Davide Bil`o, Sarel Cohen, Tobias Friedrich, and Martin Schirneck. Near-optimal deterministic single-source distance sensitivity oracles. In Petra Mutzel, Rasmus Pagh, and Grzegorz Herman, editors,29th Annual European Symposium on Algorithms, ESA 2021, Lisbon, Portugal (Virtual Conf...
-
[3]
URL: https://doi.org/10.4230/LIPIcs.ESA.2021.18, doi:10.4230/LIPICS.ESA.2021.18. 2 BCG+ 18 Davide Bil `o, Keerti Choudhary, Luciano Gual `a, Stefano Leucci, Merav Parter, and Guido Proietti. Efficient oracles and routing schemes for replacement paths. In Rolf Niedermeier and Brigitte Vall ´ee, editors,35th Symposium on Theoretical Aspects of Computer Scie...
-
[4]
2 BCHR20 Surender Baswana, Keerti Choudhary, Moazzam Hussain, and Liam Roditty
URL: https: //doi.org/10.4230/LIPIcs.STACS.2018.13,doi:10.4230/LIPICS.STACS.2018.13. 2 BCHR20 Surender Baswana, Keerti Choudhary, Moazzam Hussain, and Liam Roditty. Approximate single-source fault tolerant shortest path.ACM Trans. Algorithms, 16(4):44:1–44:22, 2020.doi:10.1145/3397532. 2 Ber10 Aaron Bernstein. A nearly optimal algorithm for approximating ...
-
[5]
doi: 10.1137/1.9781611973075.61. 1 BF00 Michael A. Bender and Martin Farach-Colton. The LCA problem revisited. In Gaston H. Gonnet, Daniel Panario, and Alfredo Viola, editors,LATIN 2000: Theoretical Informatics, 4th Latin American Symposium, Punta del Este, Uruguay, April 10-14, 2000, Proceedings, volume 1776 ofLecture Notes in Computer Science, pages 88–...
-
[6]
LATIN 2000: Theoretical Informatics
doi:10.1007/10719839\_9. 8 BFC04 Michael A. Bender and Mart´ın Farach-Colton. The level ancestor problem simplified.Theor. Comput. Sci., 321(1):5–12, June 2004.doi:10.1016/j.tcs.2003.05.002. 8 BG04 Amit Bhosle and Teofilo Gonzalez. Replacement paths for pairs of shortest path edges in directed graphs. InProc. 16th IASTED International Conference on Parall...
-
[7]
URL: https://doi.org/10.1007/ s00453-012-9621-y,doi:10.1007/S00453-012-9621-Y. 2 BLM12 Surender Baswana, Utkarsh Lath, and Anuradha S. Mehta. Single source distance oracle for planar digraphs avoiding a failed node or link. InProceedings of the Twenty-Third Annual ACM-SIAM Symposium on Discrete Algorithms, SODA ’12, page 223–232, USA,
-
[8]
Finding level-ancestors in trees
doi:10.1016/S0022-0000(05)80002-9. 8 BW84 Thomas H. Byers and Michael S. Waterman. Determining all optimal and near-optimal solutions when solving shortest path problems by dynamic programming.Operations Research, 32(6):1381–1384,
-
[9]
1 BW25 Greg Bodwin and Lily Wang
URL: http: //www.jstor.org/stable/170956. 1 BW25 Greg Bodwin and Lily Wang. Improved shortest path restoration lemmas for multiple edge failures: Trade-offs between fault-tolerance and subpaths. In Yossi Azar and Debmalya Panigrahi, editors,Proceedings of the 2025 Annual ACM-SIAM Symposium on Discrete Algorithms, SODA 2025, New Orleans, LA, USA, January 1...
-
[10]
1, 2, 3 CDWX25 Shucheng Chi, Ran Duan, Benyu Wang, and Tianle Xie
doi:10.1137/1.9781611975482.126. 1, 2, 3 CDWX25 Shucheng Chi, Ran Duan, Benyu Wang, and Tianle Xie. Undirected 3-fault replacement path in nearly cubic time. In Keren Censor-Hillel, Fabrizio Grandoni, Jo¨el Ouaknine, and Gabriele Puppis, editors,52nd International Colloquium on Automata, Languages, and Programming, ICALP 2025, July 8-11, 2025, Aarhus, Den...
-
[12]
URL: https://doi.org/10.4230/LIPIcs. ICALP.2020.81,doi:10.4230/LIPICS.ICALP.2020.81. 2, 3, 6 CZ24a Shiri Chechik and Tianyi Zhang. Faster algorithms for dual-failure replacement paths. In Karl Bringmann, Martin Grohe, Gabriele Puppis, and Ola Svensson, editors,51st International Colloquium on Automata, Languages, and Programming, ICALP 2024, Tallinn, Esto...
-
[13]
2, 3 CZ24b Shiri Chechik and Tianyi Zhang
URL: https://doi.org/10.4230/LIPIcs.ICALP.2024.41, doi:10.4230/LIPICS.ICALP.2024.41. 2, 3 CZ24b Shiri Chechik and Tianyi Zhang. Nearly optimal approximate dual-failure replacement paths. In David P . Woodruff, editor,Proceedings of the 2024 ACM-SIAM Symposium on Discrete Algorithms, SODA 2024, Alexandria, V A, USA, January 7-10, 2024, pages 2568–2596. SIA...
-
[14]
8 GL09 Zvi Gotthilf and Moshe Lewenstein
URL: https: //doi.org/10.1007/BFb0028247,doi:10.1007/BFB0028247. 8 GL09 Zvi Gotthilf and Moshe Lewenstein. Improved algorithms for the k simple shortest paths and the replacement paths problems.Inf. Process. Lett., 109(7):352–355, March 2009.doi:10.1016/j.ipl.2008.12.015. 1 GPVX21 Yuzhou Gu, Adam Polak, Virginia Vassilevska Williams, and Yinzhan Xu. Faste...
-
[15]
Faster Monotone Min-Plus Product, Range Mode, and Single Source Replacement Paths , booktitle =
URL:https://doi.org/10.4230/LIPIcs.ICALP.2021.75,doi:10.4230/LIPICS.ICALP.2021.75. 2 GV12 Fabrizio Grandoni and Virginia Vassilevska Williams. Improved distance sensitivity oracles via fast single-source replacement paths. In53rd Annual IEEE Symposium on Foundations of Computer Science, FOCS 2012, New Brunswick, NJ, USA, October 20-23, 2012, pages 748–757...
-
[16]
2 HLNV17 Monika Henzinger, Andrea Lincoln, Stefan Neumann, and Virginia Vassilevska Williams
URL: https://doi.org/10.4230/LIPIcs.ESA.2024.65, doi:10.4230/LIPICS.ESA.2024.65. 2 HLNV17 Monika Henzinger, Andrea Lincoln, Stefan Neumann, and Virginia Vassilevska Williams. Conditional Hardness for Sensitivity Problems. In Christos H. Papadimitriou, editor,8th Innovations in Theoretical Computer Science Conference (ITCS 2017), volume 67 ofLeibniz Intern...
-
[17]
Conditional Hardness for Sensitivity Problems
Schloss Dagstuhl – Leibniz-Zentrum f¨ur Informatik. URL: https://drops.dagstuhl. de/entities/document/10.4230/LIPIcs.ITCS.2017.26,doi:10.4230/LIPIcs.ITCS.2017.26. 2, 4 HS01 J. Hershberger and S. Suri. Vickrey prices and shortest paths: What is an edge worth? InProceedings of the 42nd IEEE Symposium on Foundations of Computer Science, FOCS ’01, page 252, USA,
-
[18]
1 HSB07 John Hershberger, Subhash Suri, and Amit M
IEEE Computer Society. 1 HSB07 John Hershberger, Subhash Suri, and Amit M. Bhosle. On the difficulty of some shortest path problems.ACM Trans. Algorithms, 3(1):5:1–5:15, 2007.doi:10.1145/1219944.1219951. 1 KKP93 David R. Karger, Daphne Koller, and Steven J. Phillips. Finding the hidden path: Time bounds for all-pairs shortest paths.SIAM J. Comput., 22(6):...
-
[19]
URL: http://www.jstor.org/ stable/2629357. 1 MMG89 K. Malik, A. K. Mittal, and S. K. Gupta. The k most vital arcs in the shortest path problem.Oper. Res. Lett., 8(4):223–227, August 1989.doi:10.1016/0167-6377(89)90065-5. 1, 19 NPW01 Enrico Nardelli, Guido Proietti, and Peter Widmayer. A faster computation of the most vital edge of a shortest path. Inf. Pr...
-
[20]
URL: https://www.sciencedirect.com/science/article/pii/S089982569990790X, doi:10.1006/game.1999
-
[21]
1 28 Undirected Replacement Paths: Dual Fault Reduces to Single Source RV12 Liam Roditty and Virginia Vassilevska Williams
Society for Industrial and Applied Mathematics. 1 28 Undirected Replacement Paths: Dual Fault Reduces to Single Source RV12 Liam Roditty and Virginia Vassilevska Williams. Subquadratic time approximation algorithms for the girth. In Yuval Rabani, editor,Proceedings of the Twenty-Third Annual ACM-SIAM Symposium on Discrete Algorithms, SODA 2012, Kyoto, Jap...
2012
-
[22]
1 VW18 Virginia Vassilevska Williams and R. Ryan Williams. Subcubic equivalences between path, matrix, and triangle problems.J. ACM, 65(5):27:1–27:38, 2018.doi:10.1145/3186893. 1, 2 VWX22 Virginia Vassilevska Williams, Eyob Woldeghebriel, and Yinzhan Xu. Algorithms and lower bounds for replacement paths under multiple edge failure. In2022 IEEE 63rd Annual...
-
[23]
doi:10.1137/15M1024524. 2, 3 WY13 Oren Weimann and Raphael Yuster. Replacement paths and distance sensitivity oracles via fast matrix multiplication. ACM Trans. Algorithms, 9(2):14:1–14:13, 2013.doi:10.1145/2438645.2438646. 1 Yen71 Jin Y. Yen. Finding the k shortest loopless paths in a network.Management Science, 17(11):712–716,
- [24]
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.