0
Graph doubling maps ultrabubbles to weak superbubbles in linear time
The construction lets existing directed-graph algorithms compute these nested structures on any bidirected graph without new code.
abstract click to expand
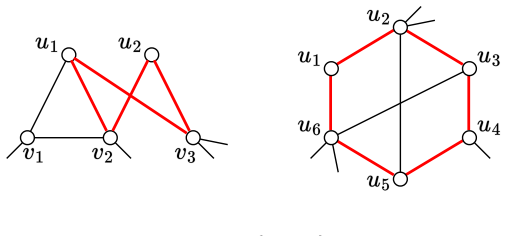
Bidirected graphs are a common generalisation of directed graphs where arcs can also be incoming to both their incident nodes, or outgoing from both their incident nodes. Such arcs allow a walk to change direction. Some algorithms can easily be adapted from directed graphs to bidirected graphs, such as shortest path algorithms. These adaptions are already used in practice, and implicitly use the graph doubling technique to apply an algorithm for directed graphs to bidirected graphs.
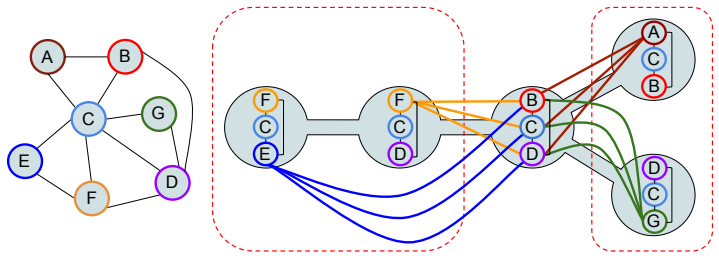
In other cases, the applicability of graph doubling is not that obvious. For example, superbubbles and their generalisation to bidirected graphs ultrabubbles. Ultrabubbles are a common structure in bidirected biological graphs which carries biological meaning, but also functions as a nested clustering method, since an ultrabubble is separated by only two nodes from the rest of the graph.
There is an existing method that enumerates a structure similar to ultrabubbles by enumerating (weak) superbubbles in the doubled graph. However, the literature does not make any direct connection between superbubbles and ultrabubbles except that a superbubble is an ultrabubble in a directed graph. Only a partial result connecting superbubbles and ultrabubbles exists by Harviainen et al. (2026).
Graph doubling on the other hand maintains connectivity, and allows to draw a direct connection between ultrabubbles and weak superbubbles. This results in the first linear-time reduction-based algorithm for computing ultrabubbles on any bidirected graph. Together with the fact that graph doubling is already used implicitly in simple cases, our result motivates that graph doubling is a powerful yet simple technique to apply algorithms for directed graphs to bidirected graphs.