Recognition: unknown
A Hybrid Approach for Closing the Sim2real Appearance Gap in Game Engine Synthetic Datasets
Pith reviewed 2026-05-09 16:14 UTC · model grok-4.3
The pith
A hybrid of diffusion editing and image translation makes game-engine synthetic images more photorealistic than either technique alone.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
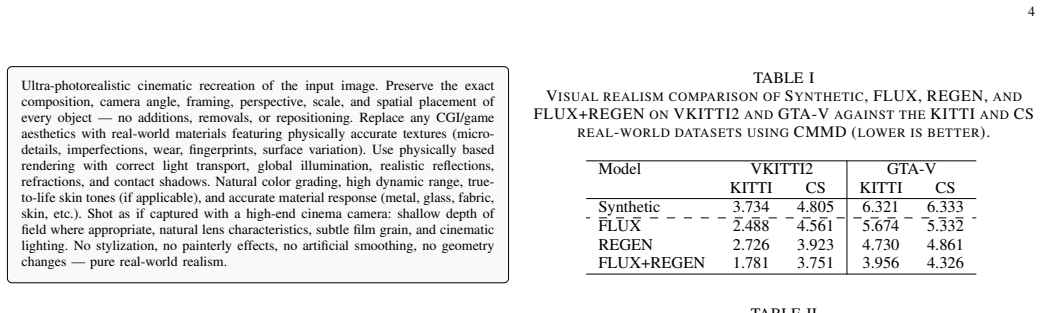
The authors show that applying FLUX.2-4B Klein first for geometry and material changes and then REGEN for distribution matching produces synthetic images with better visual realism metrics than either model used by itself, without introducing semantic inconsistencies that would invalidate the original ground-truth labels.
What carries the argument
The hybrid pipeline that sequences diffusion-based editing for geometry and materials before image-to-image translation for overall distribution alignment.
If this is right
- Game-engine synthetic datasets can be post-processed at scale to reduce the sim2real appearance gap without redesigning the underlying 3D scenes.
- The hybrid method outperforms standalone diffusion or translation models on realism metrics while retaining usable semantic annotations.
- Distribution-matching steps can correct semantic drifts that pure generative diffusion models sometimes introduce.
- The approach demonstrates that complementary strengths of generative editing and translation techniques can be combined without manual intervention.
Where Pith is reading between the lines
- If the realism gains persist, training pipelines that mix hybrid-enhanced synthetic data with small amounts of real data could reduce the need for large real-world labeled collections.
- The same sequencing idea might transfer to other synthetic sources such as physics simulators or CAD renderers used in robotics.
- Order of operations between the two models could be tested systematically to see whether translation before diffusion yields different results.
- The work implies that future synthetic data pipelines may routinely include a lightweight realism-correction stage rather than relying on engine fidelity alone.
Load-bearing premise
Gains measured on visual realism metrics for the tested game-engine images will carry over to better accuracy on real-world vision tasks without creating new labeling errors.
What would settle it
Training a standard object detector or segmenter on the hybrid-enhanced synthetic data and finding that its accuracy on a held-out real-world test set does not exceed the accuracy obtained from the original unprocessed synthetic data.
Figures


read the original abstract
Video game engines have been an important source for generating large volumes of visual synthetic datasets for training and evaluating computer vision algorithms that are to be deployed in the real world. While the visual fidelity of modern game engines has been significantly improved with technologies such as ray-tracing, a notable sim2real appearance gap between the synthetic and the real-world images still remains, which limits the utilization of synthetic datasets in real-world applications. In this letter, we investigate the ability of a state-of-the-art image generation and editing diffusion model (FLUX.2-4B Klein) to enhance the photorealism of synthetic datasets and compare its performance against a traditional image-to-image translation model (REGEN). Furthermore, we propose a hybrid approach that combines the strong geometry and material transformations of diffusion-based methods with the distribution-matching capabilities of image-to-image translation techniques. Through experiments, it is demonstrated that REGEN outperforms FLUX.2-4B Klein and that by combining both FLUX.2-4B Klein and REGEN models, better visual realism can be achieved compared to using each model individually, while maintaining semantic consistency. The code is available at: https://github.com/stefanos50/Hybrid-Sim2Real
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper investigates enhancing photorealism of synthetic datasets from video game engines using the FLUX.2-4B Klein diffusion model and the REGEN image-to-image translation model. It compares the two and proposes a hybrid combination, claiming through experiments that REGEN outperforms FLUX while the hybrid achieves superior visual realism without compromising semantic consistency. Code is made publicly available.
Significance. If substantiated with proper quantitative evidence, the hybrid approach could offer a practical technique for reducing the sim-to-real appearance gap in synthetic data generation for computer vision, potentially improving downstream model performance. The public code release supports reproducibility and is a clear strength.
major comments (3)
- Abstract: The central claims that 'REGEN outperforms FLUX.2-4B Klein' and that 'by combining both ... better visual realism can be achieved ... while maintaining semantic consistency' are asserted without any quantitative tables, metrics (FID, LPIPS, or human preference scores), dataset sizes, error bars, or statistical tests. This absence makes it impossible to evaluate the magnitude or reliability of the reported improvements.
- Abstract: The assertion of maintained semantic consistency after hybrid editing lacks supporting evidence such as pre/post semantic metrics (e.g., object detection mAP consistency, segmentation IoU agreement, or scene relation preservation). Global appearance metrics alone cannot rule out semantic drift, which is a known risk with diffusion models even under strong conditioning.
- Abstract/Method: No description is provided of the hybrid implementation details, including application order (FLUX followed by REGEN or reverse), fusion mechanism, conditioning strategy, or any parameter settings for the combination. These specifics are load-bearing for reproducing the claimed superiority.
minor comments (1)
- The abstract would benefit from a brief mention of the specific game engine datasets or scenes used in the experiments to contextualize the results.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback. We address each major comment below and will revise the manuscript to incorporate additional quantitative evidence, semantic metrics, and methodological details as outlined.
read point-by-point responses
-
Referee: Abstract: The central claims that 'REGEN outperforms FLUX.2-4B Klein' and that 'by combining both ... better visual realism can be achieved ... while maintaining semantic consistency' are asserted without any quantitative tables, metrics (FID, LPIPS, or human preference scores), dataset sizes, error bars, or statistical tests. This absence makes it impossible to evaluate the magnitude or reliability of the reported improvements.
Authors: We agree the abstract would be strengthened by explicit quantitative support. The experiments section presents comparative results via visual examples across multiple scenes; we will revise the abstract to reference key metrics (e.g., FID and LPIPS) and dataset sizes from those evaluations, and add a concise results table summarizing the improvements with the reported values. revision: yes
-
Referee: Abstract: The assertion of maintained semantic consistency after hybrid editing lacks supporting evidence such as pre/post semantic metrics (e.g., object detection mAP consistency, segmentation IoU agreement, or scene relation preservation). Global appearance metrics alone cannot rule out semantic drift, which is a known risk with diffusion models even under strong conditioning.
Authors: We acknowledge that quantitative semantic-preservation metrics would better substantiate the claim. We will add pre- and post-processing evaluations using segmentation IoU and object-detection mAP on the original versus edited images to demonstrate consistency of labels and scene structure in the revised manuscript. revision: yes
-
Referee: Abstract/Method: No description is provided of the hybrid implementation details, including application order (FLUX followed by REGEN or reverse), fusion mechanism, conditioning strategy, or any parameter settings for the combination. These specifics are load-bearing for reproducing the claimed superiority.
Authors: We will expand the Method section to include a precise description of the hybrid pipeline: application order (FLUX.2-4B Klein followed by REGEN), the fusion mechanism (sequential image-to-image translation with shared conditioning), conditioning strategy, and all parameter settings used in the experiments to enable full reproducibility. revision: yes
Circularity Check
No circularity: empirical hybrid model evaluation is self-contained
full rationale
The paper describes an experimental pipeline that applies two off-the-shelf pre-trained models (FLUX.2-4B Klein diffusion model and REGEN image-to-image translation) to game-engine synthetic images, then reports comparative metrics on photorealism. The hybrid is presented as a straightforward sequential or combined application of these external models rather than a derived quantity. No equations, fitted parameters defined by the authors, or first-principles derivations appear; claims of improved realism and maintained semantic consistency rest on direct empirical measurements, not on any reduction to inputs by construction. Self-citations are absent, and the work does not invoke uniqueness theorems or ansatzes from prior author work. This is a standard applied ML comparison paper whose central results are falsifiable against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Infrared-visible synthetic data from game engine for image fusion improvement,
X. Gu, G. Liu, X. Zhang, L. Tang, X. Zhou, and W. Qiu, “Infrared-visible synthetic data from game engine for image fusion improvement,”IEEE Transactions on Games, vol. 16, no. 2, pp. 291–302, 2024
2024
-
[2]
https://doi.org/10.48550/ARXIV.2509.25164
R. Sapkota, R. H. Cheppally, A. Sharda, and M. Karkee, “Yolo26: Key architectural enhancements and performance benchmarking for real-time object detection,” arXiv:2509.25164, 2026
-
[3]
Masked-attention mask transformer for universal image segmentation,
B. Cheng, I. Misra, A. G. Schwing, A. Kirillov, and R. Girdhar, “Masked-attention mask transformer for universal image segmentation,” in2022 IEEE/CVF Conference on Computer Vision and Pattern Recog- nition (CVPR), 2022, pp. 1280–1289
2022
-
[4]
Carla2real: A tool for reducing the sim2real appearance gap in carla simulator,
S. Pasios and N. Nikolaidis, “Carla2real: A tool for reducing the sim2real appearance gap in carla simulator,”IEEE Transactions on Intelligent Transportation Systems, vol. 26, no. 11, pp. 18 747–18 761, 2025
2025
-
[5]
Regen: Real-time photorealism enhancement in games via a dual- stage generative network framework,
——, “Regen: Real-time photorealism enhancement in games via a dual- stage generative network framework,”IEEE Transactions on Games, pp. 1–8, 2026
2026
-
[6]
Enhancing photorealism enhancement,
S. R. Richter, H. A. Alhaija, and V . Koltun, “Enhancing photorealism enhancement,”IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 45, no. 2, pp. 1700–1715, 2023
2023
-
[7]
Sim2real diffusion: Leverag- ing foundation vision language models for adaptive automated driving,
C. Samak, T. Samak, B. Li, and V . Krovi, “Sim2real diffusion: Leverag- ing foundation vision language models for adaptive automated driving,” IEEE Robotics and Automation Letters, vol. 11, pp. 177–184, 2026
2026
-
[8]
Zero-shot synthetic video realism enhancement via structure-aware denoising,
Y . Wang, L. Ji, Z. Ke, H. Yang, S.-N. Lim, and Q. Chen, “Zero-shot synthetic video realism enhancement via structure-aware denoising,” arXiv:2511.14719, 2025
-
[9]
The cityscapes dataset for semantic urban scene understanding,
M. Cordts, M. Omran, S. Ramos, T. Rehfeld, M. Enzweiler, R. Be- nenson, U. Franke, S. Roth, and B. Schiele, “The cityscapes dataset for semantic urban scene understanding,” in2016 IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2016, pp. 3213– 3223
2016
-
[10]
Vision meets robotics: The kitti dataset,
A. Geiger, P. Lenz, C. Stiller, and R. Urtasun, “Vision meets robotics: The kitti dataset,”Int. J. Rob. Res., vol. 32, no. 11, p. 1231–1237, Sep. 2013
2013
-
[11]
P. Alimisis, I. Mademlis, P. Radoglou-Grammatikis, P. Sarigiannidis, and G. T. Papadopoulos, “Advances in diffusion models for image data augmentation: A review of methods, models, evaluation metrics and future research directions,” arXiv:2407.04103, 2025
-
[12]
Flux.2-4b klein: Text-to-image generation model,
Black Forest Labs, “Flux.2-4b klein: Text-to-image generation model,” https://huggingface.co/black-forest-labs/FLUX.2-klein-4B, 2026, ac- cessed: 2026-04-29
2026
-
[13]
Rethinking fid: Towards a better evaluation metric for image generation,
S. Jayasumana, S. Ramalingam, A. Veit, D. Glasner, A. Chakrabarti, and S. Kumar, “Rethinking fid: Towards a better evaluation metric for image generation,” in2024 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR), 2024, pp. 9307–9315
2024
-
[14]
Y . Cabon, N. Murray, and M. Humenberger, “Virtual kitti 2,” arXiv:2001.10773, 2020
work page internal anchor Pith review arXiv 2001
-
[15]
Leveraging Synthetic Data in Object Detection on Unmanned Aerial Vehicles ,
B. Kiefer, D. Ott, and A. Zell, “ Leveraging Synthetic Data in Object Detection on Unmanned Aerial Vehicles ,” in2022 26th International Conference on Pattern Recognition (ICPR). Los Alamitos, CA, USA: IEEE Computer Society, Aug. 2022, pp. 3564–3571
2022
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.