Recognition: unknown
Development and Validation of an Integrated LiDAR-Camera System for Real-Time Monitoring of Underground Longwall Operations
Pith reviewed 2026-05-08 02:19 UTC · model grok-4.3
The pith
A flameproof LiDAR-camera system enables real-time colorized 3D monitoring in underground longwall operations.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
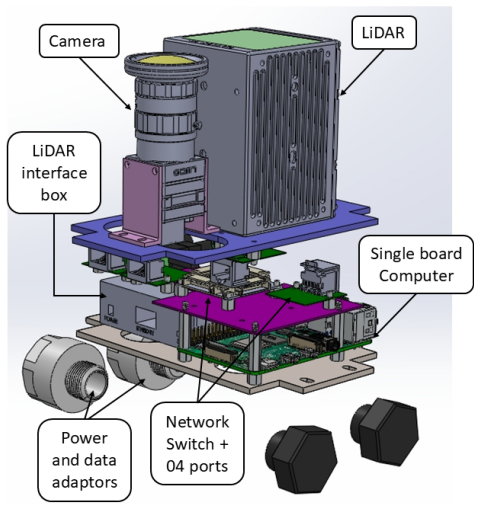
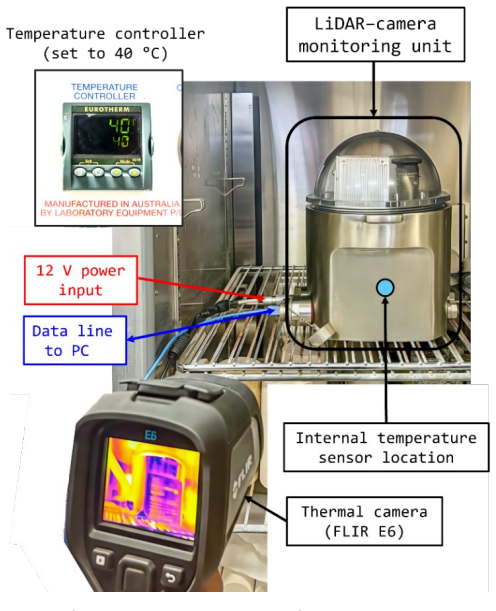
The central claim is that a LiDAR-camera fusion system housed in a certified flameproof enclosure can achieve more than 97 percent overlap between LiDAR points and the camera field of view, maintain geometric accuracy after enclosure corrections, transmit processed colorized point clouds at up to 10 Hz under 25 Mb/s bandwidth, and keep surface temperatures at 70 °C with internal temperatures at 57 °C through passive thermal design.
What carries the argument
The enclosure-aware calibration and correction process that compensates for optical and geometric distortions introduced by the polycarbonate dome while preserving fusion performance.
If this is right
- More than 97 percent of LiDAR points fall inside the camera field of view, supporting reliable colorisation of the point clouds.
- Enclosure-aware calibration preserves geometric accuracy of the fused data.
- Processed colourised point clouds transmit at up to 10 Hz while bandwidth stays below 25 Mb/s.
- Iterative component placement, heat sinking, and passive conduction reduce peak surface temperature to 70 °C and stabilise internal temperature at 57 °C.
Where Pith is reading between the lines
- The same enclosure and calibration approach could support continuous hazard detection such as roof movement or equipment positioning in the mine.
- Real-time colorised 3D data might feed directly into automated guidance systems for mining machinery.
- Similar compact flameproof sensor packages could be adapted for other confined, explosive-risk settings such as tunnels or chemical processing areas.
Load-bearing premise
That laboratory experiments and the representative longwall simulation accurately capture the combined effects of dust, vibration, variable methane concentrations, and continuous operation in actual underground longwall environments, and that the polycarbonate dome distortions remain fully correctable in real time.
What would settle it
Deploying the complete system in an operating underground longwall mine and recording the fraction of LiDAR points that receive accurate color information plus the system's ability to sustain 10 Hz transmission over hours of continuous exposure to dust and vibration.
Figures


read the original abstract
Real-time spatial monitoring in underground longwall operations is challenging due to methane-related safety risks, poor visibility, elevated thermal loads, spatial confinement, and bandwidth-limited communications. Currently available camera-based monitoring provides visual context but lacks direct depth information, while standalone underground LiDAR scanners are limited to monochromatic or periodic 3D mapping. This paper presents the design, integration, and experimental validation of a LiDAR-camera monitoring system built around a certified flameproof enclosure that prevents flame propagation into the surrounding atmosphere. The system combines a solid-state LiDAR, an industrial RGB camera, and an onboard processor within a compact hardware assembly, supporting LiDAR-camera fusion, low-light image enhancement, and real-time processing. Laboratory experiments evaluated LiDAR and camera performance through the protective polycarbonate dome and quantified optical and geometric distortions introduced by the enclosure. Thermal testing showed that iterative component placement, heat sinking, and passive conduction reduced peak surface temperature from 106 {\deg}C to 70 {\deg}C, with internal temperature stabilising at 57 {\deg}C. Furthermore, a representative longwall simulation was created to evaluate the complete sensing, fusion, and transmission workflow under controlled geometric and low-light conditions. In the final configuration, more than 97% of LiDAR points fell within the camera field of view, supporting reliable colourisation. Enclosure-aware calibration and correction maintained geometric accuracy, while processed colourised point clouds were transmitted at up to 10 Hz with sustained bandwidth below 25 Mb/s.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents the design, integration, and experimental validation of a LiDAR-camera system housed in a certified flameproof enclosure for real-time 3D colorized monitoring in underground longwall mining. It reports laboratory characterization of enclosure-induced optical and geometric distortions, thermal management reducing peak surface temperature from 106°C to 70°C with internal stabilization at 57°C, and a representative longwall simulation under controlled geometric and low-light conditions yielding >97% LiDAR point coverage within the camera FOV, maintained geometric accuracy via enclosure-aware calibration, and transmission of processed point clouds at up to 10 Hz with bandwidth below 25 Mb/s.
Significance. If the performance metrics hold under actual underground conditions, the work offers a practical engineering contribution to safety-critical monitoring by enabling fused depth and color data in methane-prone, low-visibility environments. Strengths include direct hardware measurements of thermal reduction and transmission rates, plus explicit handling of the polycarbonate dome's effects on calibration and point coverage. The absence of self-referential modeling or fitted parameters supports the experimental grounding.
major comments (2)
- [Abstract] Abstract: The central claim of suitability for underground longwall operations rests on validation limited to 'laboratory experiments' and a 'representative longwall simulation ... under controlled geometric and low-light conditions.' No testing addresses dust attenuation of both sensors, vibration-induced calibration drift, variable methane concentrations, or multi-hour continuous runtime effects on thermal stability and bandwidth. This gap directly undermines transferability of the reported 97% coverage, accuracy maintenance, and 10 Hz transmission to the full set of constraints named in the introduction.
- [Abstract] Abstract and validation sections: Quantitative results (97% point coverage, temperature reductions from 106°C to 70°C, bandwidth <25 Mb/s) are stated without error bars, statistical details, baseline comparisons to standalone sensors, or raw data, weakening assessment of repeatability and robustness for the integration claims.
minor comments (2)
- [Abstract] The abstract refers to 'iterative component placement, heat sinking, and passive conduction' for thermal design without providing a figure, table, or step-by-step description of the iterations or final layout.
- Notation for transmission metrics (e.g., 'up to 10 Hz' and 'below 25 Mb/s') would benefit from explicit definition of sustained vs. peak values and any compression methods used.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback, which has prompted us to strengthen the manuscript's discussion of scope and limitations. We address the major comments point by point below.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim of suitability for underground longwall operations rests on validation limited to 'laboratory experiments' and a 'representative longwall simulation ... under controlled geometric and low-light conditions.' No testing addresses dust attenuation of both sensors, vibration-induced calibration drift, variable methane concentrations, or multi-hour continuous runtime effects on thermal stability and bandwidth. This gap directly undermines transferability of the reported 97% coverage, accuracy maintenance, and 10 Hz transmission to the full set of constraints named in the introduction.
Authors: We agree that the reported metrics (97% coverage, thermal performance, and transmission rates) were obtained under controlled laboratory and simulated conditions that replicate selected aspects of the underground environment, such as geometry and low light, but do not include dust, vibration, methane variability, or extended runtime. The manuscript's contribution centers on the enclosure design, integration, calibration handling, and initial workflow validation rather than claiming full operational readiness. In the revised version we have added an explicit limitations subsection in the discussion that states these constraints, qualifies the transferability of the results, and outlines planned field trials. This change directly addresses the concern without altering the original experimental claims. revision: yes
-
Referee: [Abstract] Abstract and validation sections: Quantitative results (97% point coverage, temperature reductions from 106°C to 70°C, bandwidth <25 Mb/s) are stated without error bars, statistical details, baseline comparisons to standalone sensors, or raw data, weakening assessment of repeatability and robustness for the integration claims.
Authors: We accept that the original presentation would benefit from greater statistical transparency. Repeated trials were conducted for the coverage, temperature, and bandwidth measurements; we have now added error bars (standard deviation) to the relevant figures and text, included a brief statistical summary of repeatability, and inserted baseline comparisons against the individual LiDAR and camera operating without the enclosure under the same test conditions. A link to the anonymized raw dataset has also been added to the data-availability statement. These revisions improve evaluability of the integration claims while remaining faithful to the existing experimental records. revision: yes
- The absence of data from actual underground longwall deployments that would quantify dust attenuation, vibration-induced calibration drift, methane effects, and multi-hour thermal/bandwidth stability.
Circularity Check
No circularity: experimental validation rests on direct hardware measurements against external benchmarks
full rationale
The paper reports hardware integration, laboratory characterization of enclosure distortions, thermal testing with measured temperature reductions, and a controlled geometric/low-light simulation for workflow validation. All central claims (97% LiDAR points in FOV, geometric accuracy maintenance, 10 Hz transmission under 25 Mb/s, temperature stabilization) are presented as outcomes of direct empirical tests and component measurements, not as outputs of any fitted model, self-referential prediction, or derivation chain. No equations, parameter fitting, uniqueness theorems, or self-citations are invoked to support the performance metrics; the work is self-contained against stated external constraints such as bandwidth limits and temperature thresholds.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The flameproof enclosure meets certification standards preventing flame propagation into methane atmospheres.
- domain assumption Laboratory thermal, optical, and geometric tests plus the simulated longwall setup sufficiently represent real underground conditions for performance claims.
Reference graph
Works this paper leans on
-
[1]
Exposure to Harmful Dusts on Fully Powered Longwall Coal Mines in Poland,
J. Brodny and M. Tutak, "Exposure to Harmful Dusts on Fully Powered Longwall Coal Mines in Poland," (in eng), Int J Environ Res Public Health, vol. 15, no. 9, Aug 27 2018, doi: 10.3390/ijerph15091846
-
[2]
Longwall automation: trends, challenges and opportunities,
J. C. Ralston, C. O. Hargrave, and M. T. Dunn, "Longwall automation: trends, challenges and opportunities," Int. J. Min. Sci. Technol., vol. 27, no. 5, pp. 733-739, 2017/09/01/ 2017, doi: https://doi.org/10.1016/j.ijmst.2017.07.027
-
[3]
M. Dunn, P . Reid, and J. Malos, "Development of a Protective Enclosure for Remote Sensing Applications— Case Study: Laser Scanning in Underground Coal Mines," Resources, vol. 9, no. 5, p. 56, 2020, doi: 10.3390/resources9050056
-
[4]
A review of laser scanning for geological and geotechnical applications in underground mining,
S. Kumar Singh, B. Pratap Banerjee, and S. Raval, "A review of laser scanning for geological and geotechnical applications in underground mining," (in English), Int. J. Min. Sci. Technol., Review vol. 33, no. 2, pp. 133-154, 2023, doi: 10.1016/j.ijmst.2022.09.022
-
[5]
International Electrotechnical Commission (IEC), IEC System for Certification to Standards Relating to Equipment for Use in Explosive Atmospheres, Geneva, Switzerland: IEC, 2014
2014
-
[6]
CSIRO 3D laser scanner invention set to revolutionise mining, industry says
Lexy Hamilton-Smith. "CSIRO 3D laser scanner invention set to revolutionise mining, industry says." https://www.abc.net.au/news/2019-11-03/coal-mining-csiro-exscan-3d-laser-scanner- invention/11649104 (accessed 2024/04/10. 30
-
[7]
Mapping the underground
T. Thwaites. "Mapping the underground." https://www.csiro.au/en/news/all/articles/2019/december/mapping-the-underground (accessed 2024/04/16
2019
-
[8]
IEC 60079-1:2014 Explosive Atmospheres -- Part 1: Equipment Protection by Flameproof Enclosures "d", I. E. C. (IEC), Geneva, Switzerland, 2014
2014
-
[9]
IEC 60079-0:2017 Explosive Atmospheres -- Part 0: Equipment -- General Requirements, I. E. C. (IEC), Geneva, Switzerland, 2017
2017
-
[10]
J. Wang, L. Wang, P . Peng, Y . Jiang, J. Wu, and Y . Liu, "Efficient and accurate mapping method of underground metal mines using mobile mining equipment and solid-state lidar," Measurement, vol. 221, p. 113581, 2023/11/15/ 2023, doi: https://doi.org/10.1016/j.measurement.2023.113581
-
[11]
J. Zhang et al., "Signal-to-noise analysis of point target detection using image pixel binning for space-based infrared electro-optical systems," Infrared Physics & Technology, vol. 133, p. 104757, 2023/09/01/ 2023, doi: https://doi.org/10.1016/j.infrared.2023.104757
-
[12]
Sensing Technology Applications in the Mining Industry— A Systematic Review,
J. Duarte, F. Rodrigues, and J. Castelo Branco, "Sensing Technology Applications in the Mining Industry— A Systematic Review," International Journal of Environmental Research and Public Health, vol. 19, no. 4, p. 2334, 2022. [Online]. Available: https://www.mdpi.com/1660- 4601/19/4/2334
2022
-
[13]
W. Calder, D. P . Snyder, and J. F. Burr, "Intrinsically Safe Systems: Equivalency of International Standards Compared to U.S. Mining Approval Criteria," (in eng), IEEE Trans Ind Appl, vol. 54, no. 3, pp. 2975-2980, May 2018, doi: 10.1109/tia.2018.2804322
-
[14]
Intrinsic Safety Protection for Explosive Atmosphere: A Review,
B. Ahirwal and R. Prasad, "Intrinsic Safety Protection for Explosive Atmosphere: A Review," International Journal of Engineering and Applied Sciences, vol. 4, 2017
2017
-
[15]
A. Sahebi, H. Jalalifar, and M. Ebrahimi, "Stability analysis and optimum support design of a roadway in a faulted zone during longwall face retreat - case study : Tabas Coal Mine," 2024. [Online]. Available: https://ro.uow.edu.au/articles/conference_contribution/Stability_analysis_and_optimum_su pport_design_of_a_roadway_in_a_faulted_zone_during_longwall...
-
[16]
A. Skoczylas, N. Duda-Mróz, W. Koperska, P . Stefaniak, and P . Śliwiński, "Production Monitoring and Machine Tracking in Underground Mines Based on a Collision Avoidance System: A Case Study," Computer Assisted Methods in Engineering and Science, vol. 32, 07/04 2025, doi: 10.24423/cames.2025.1722
-
[17]
Real-Time Monitoring of Underground Miners’ Status Based on Mine IoT System,
Y . Jiang, W. Chen, X. Zhang, X. Zhang, and G. Yang, "Real-Time Monitoring of Underground Miners’ Status Based on Mine IoT System," Sensors, vol. 24, no. 3, p. 739, 2024, doi: 10.3390/s24030739
-
[18]
On the Improvement of ROS-Based Control for Teleoperated Yaskawa Robots,
S. Baklouti, G. Gallot, J. Viaud, and K. Subrin, "On the Improvement of ROS-Based Control for Teleoperated Yaskawa Robots," Applied Sciences, vol. 11, no. 16, p. 7190, 2021. [Online]. Available: https://www.mdpi.com/2076-3417/11/16/7190
2021
-
[19]
On Underground Mine Communication Systems,
S. C. Bakshi, G. C. Roy, E. Saicharan, and E. Parvathi, "On Underground Mine Communication Systems," 2025: ACM, pp. 307-312, doi: 10.1145/3700838.3703680. [Online]. Available: https://dx.doi.org/10.1145/3700838.3703680
-
[20]
Application of Optical Communication for an Enhanced Health and Safety System in Underground Mine,
O. Stoicuta, S. Riurean, S. Burian, M. Leba, and A. Ionica, "Application of Optical Communication for an Enhanced Health and Safety System in Underground Mine," Sensors, vol. 23, no. 2, p. 692, 2023, doi: 10.3390/s23020692
-
[21]
Communications in Underground Mining Using Broadband Power Line Modems
G. Khan, "Communications in Underground Mining Using Broadband Power Line Modems." [Online]. Available: https://www.slideshare.net/slideshow/communications-in-underground- mining-using-broad-band-power-line-modems/60639863
-
[22]
P . L. Ngwenyama and R. C. W. Webber-Youngman, "Recent advances, challenges and future trends for the applications of Low Power Wide Area Networks (LPWANs) technologies in 31 underground mines," International Journal of Mining, Reclamation and Environment, vol. 39, no. 8, pp. 547-599, 2025/09/14 2025, doi: 10.1080/17480930.2025.2455587
-
[23]
MonitorVLM:A Vision Language Framework for Safety Violation Detection in Mining Operations,
J. Wu et al., "MonitorVLM:A Vision Language Framework for Safety Violation Detection in Mining Operations," ArXiv, vol. abs/2510.03666, 2025
-
[24]
LiDAR Point Cloud Colourisation Using Multi-Camera Fusion and Low-Light Image Enhancement,
P . Ranasinghe, D. Patra, B. Banerjee, and S. Raval, "LiDAR Point Cloud Colourisation Using Multi-Camera Fusion and Low-Light Image Enhancement," Sensors, vol. 25, no. 21, p. 6582doi: 10.3390/s25216582
-
[25]
The use of light metals and their alloys in underground coal mines,
D. Forrester and G. W. Bonnell, "The use of light metals and their alloys in underground coal mines," CIM Bulletin, vol. 94, pp. 76-78, 09/01 2001
2001
-
[26]
LiDAR Through Domes: Modelling, Simulation, and Correction of Refraction,
P . Ranasinghe, D. Patra, B. Banerjee, and S. Raval, "LiDAR Through Domes: Modelling, Simulation, and Correction of Refraction," in 2025 IEEE International Conference on Imaging Systems and Techniques (IST), 15-17 Oct. 2025 2025, pp. 1-6, doi: 10.1109/IST66504.2025.11268399
-
[27]
Correcting Time Offsets and Enclosure-Induced Measurement Distortions in LiDAR–Camera Systems,
P . Ranasinghe et al., "Correcting Time Offsets and Enclosure-Induced Measurement Distortions in LiDAR–Camera Systems," 2026, doi: 10.2139/ssrn.6143992
-
[28]
Z. Zhang, "A flexible new technique for camera calibration," IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 22, no. 11, pp. 1330-1334, 2000, doi: 10.1109/34.888718
-
[29]
An Automated Single-Shot LiDAR and Camera Extrinsic Calibration Method Using Image Processing,
P . Ranasinghe, D. Patra, B. Banerjee, and S. Raval, "An Automated Single-Shot LiDAR and Camera Extrinsic Calibration Method Using Image Processing," in IGARSS 2025 - 2025 IEEE International Geoscience and Remote Sensing Symposium, 3-8 Aug. 2025 2025, pp. 5099- 5102, doi: 10.1109/IGARSS55030.2025.11242429
-
[30]
Government of India. (2002). Circular No. 08, Circular No. 08 of 2002: Standards of illumination in coal mines
2002
-
[31]
livox_laser_simulation
Livox Technology Company Limited. "livox_laser_simulation." https://github.com/Livox- SDK/livox_laser_simulation (accessed 2024/02/15
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.