Recognition: unknown
Neuromorphic Control for 3D Navigation in Minecraft Using Genetic Algorithms
Pith reviewed 2026-05-08 01:44 UTC · model grok-4.3
The pith
A genetic algorithm evolves neural network weights to control navigation through Minecraft parkour maps.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors design a genetic algorithm to generate weights for a neural network to autonomously evaluate inputs for block distances, terrain, and obstacles to determine the most optimal pathing.
What carries the argument
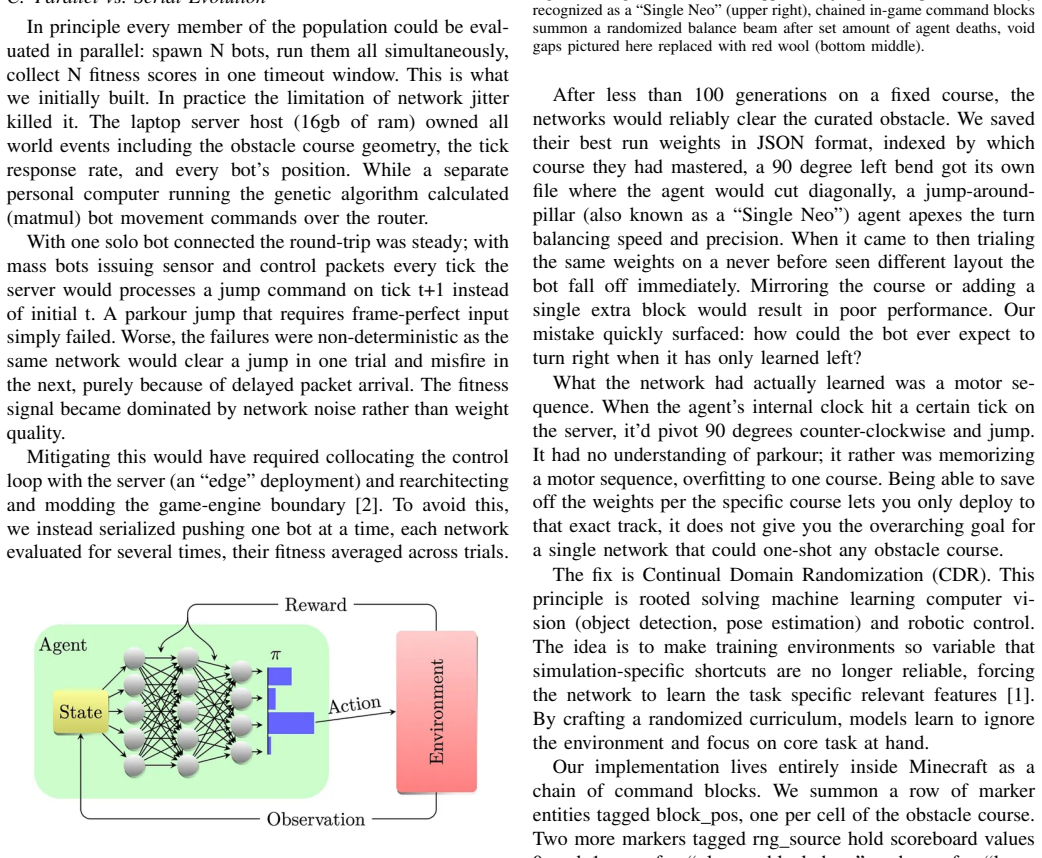
Genetic algorithm that evolves weights for a neural network whose inputs are distances to blocks, terrain type, and obstacle locations.
Load-bearing premise
A fitness function based on path efficiency and success rate will produce weights that work on new maps instead of only on the ones used for training.
What would settle it
Run the evolved network on a set of Minecraft parkour maps never seen during training and measure whether it completes them at the same success rate and speed as on training maps.
Figures


read the original abstract
The popular 2009 voxel based videogame, Minecraft, contains several distinct disciplines. One of which is "parkour," gameplay that focuses on traversing a world's environment with maximum efficiency. The Minecraft online community has turned the game's physics engine into dynamic puzzles, requiring players to masterfully manipulate motion mechanics through frame precise timing of keystrokes. Actions such as sprinting, sneaking, and mouse direction are all combined to clear specific difficult jumps. Through this project, we design a genetic algorithm to generate weights for a neural network to autonomously evaluate inputs for block distances, terrain, and obstacles to determine the most optimal pathing.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript claims to design a genetic algorithm that evolves weights for a neural network controller. The controller takes inputs on block distances, terrain, and obstacles in Minecraft to autonomously determine the most optimal pathing for parkour navigation.
Significance. If the approach were fully implemented with reproducible results showing reliable navigation success across maps, it could contribute to evolutionary neuromorphic control and game AI by demonstrating GA-driven adaptation in a physics-rich 3D environment. The idea aligns with interests in parameter-light controllers for complex tasks, but the current text provides no evidence to evaluate this potential.
major comments (2)
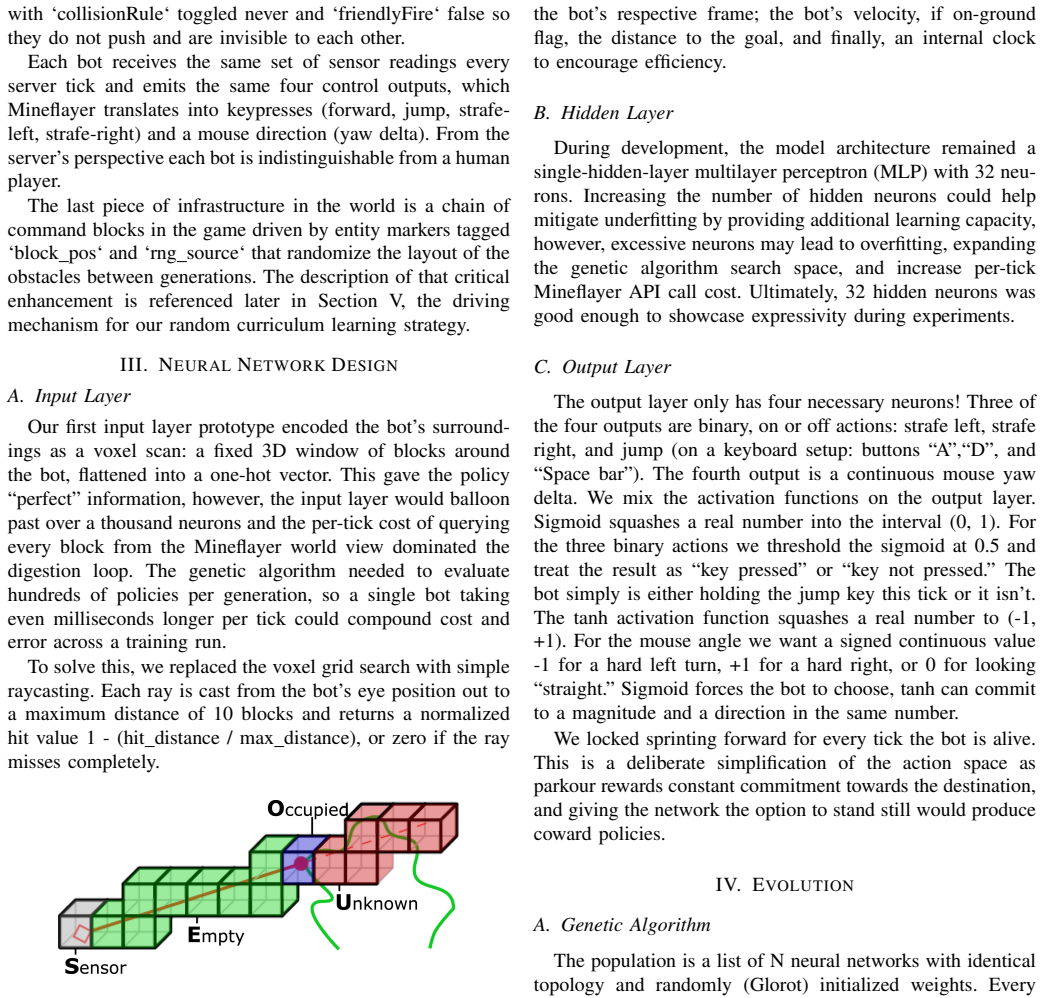
- [Abstract] Abstract: The assertion that the system determines 'the most optimal pathing' is unsupported. The text contains no fitness function, no neural network architecture or input encoding details, no evolved weights, no success rates, no fitness curves, and no comparisons against baselines or random controllers.
- [Full Text] Full manuscript: No experimental validation is reported on even a single parkour map, no hyperparameters for the genetic algorithm are specified, and no discussion of generalization or overfitting risks appears, leaving the central claim as an unverified design outline.
minor comments (1)
- The submission appears to consist only of the abstract; if additional sections exist they must be included to allow evaluation.
Simulated Author's Rebuttal
We thank the referee for the careful reading and for highlighting the gaps in our manuscript. We agree that the current version presents an unverified design outline rather than a complete empirical study, and the abstract overstates the results. We will revise the manuscript accordingly to include the missing details, experimental validation, and tempered claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The assertion that the system determines 'the most optimal pathing' is unsupported. The text contains no fitness function, no neural network architecture or input encoding details, no evolved weights, no success rates, no fitness curves, and no comparisons against baselines or random controllers.
Authors: We agree that the abstract's phrasing is unsupported and will revise it to describe the work as a proposed genetic-algorithm method for evolving a neural-network controller rather than claiming optimality. In the revision we will add the fitness function definition, neural-network architecture and input encoding, representative evolved weights, success rates on test maps, fitness curves, and comparisons against random and baseline controllers. revision: yes
-
Referee: [Full Text] Full manuscript: No experimental validation is reported on even a single parkour map, no hyperparameters for the genetic algorithm are specified, and no discussion of generalization or overfitting risks appears, leaving the central claim as an unverified design outline.
Authors: The referee is correct; the submitted manuscript contains only the design description and no experiments, hyperparameters, or generalization analysis. We will add a new experimental section that reports results on multiple parkour maps, lists all genetic-algorithm hyperparameters, and discusses generalization and overfitting mitigation strategies such as map diversity and held-out validation sets. revision: yes
Circularity Check
No circularity detected; paper is a high-level design outline with no equations or derivations
full rationale
The manuscript presents a high-level description of using a genetic algorithm to evolve neural-network weights for Minecraft navigation based on block distances, terrain, and obstacles. No equations, fitted parameters, predictions, self-citations, uniqueness theorems, or ansatzes are present. The central claim is a design statement rather than a derived result that could reduce to its inputs by construction. The derivation chain is empty, making the work self-contained as a method proposal.
Axiom & Free-Parameter Ledger
free parameters (3)
- neural network architecture and input encoding
- genetic algorithm hyperparameters
- fitness function definition
axioms (1)
- domain assumption Genetic algorithms can converge to useful weights for continuous control tasks given sufficient generations and a well-shaped fitness landscape.
Reference graph
Works this paper leans on
-
[1]
J. Josifovski, S. Auddy, M. Malmir, J. Piater, A. Knoll, and N. Navarro- Guerrero, “Continual Domain Randomization,” inProc. 2024 IEEE/RSJ Int. Conf. Intelligent Robots and Systems (IROS), Oct. 2024, pp. 4965– 4972, doi: 10.1109/IROS58592.2024.10802060
-
[2]
Publish-Subscribe Frame- work for Event Management in IoT-based Applications,
T. Nguyen, M. Aiello, and M. D. Francesco, “Publish-Subscribe Frame- work for Event Management in IoT-based Applications,” arXiv preprint arXiv:1801.02154, Jan. 2018
-
[3]
P.-R. Hirt, J. Holtkamp, L. Hoegner, Y . Xu, and U. Stilla, “Occlusion detection of traffic signs by voxel-based ray tracing using highly detailed models and MLS point clouds of vegetation,”Int. J. Appl. Earth Obs. Geoinf., vol. 114, art. no. 103017, 2022, doi: 10.1016/j.jag.2022.103017
-
[4]
R. S. Sutton and A. G. Barto,Reinforcement Learning: An Introduction, 2nd ed. Cambridge, MA, USA: MIT Press, 2018
2018
-
[5]
Reinforcement Learning: Understanding CS229 Reinforcement Learn- ing and Control,
“Reinforcement Learning: Understanding CS229 Reinforcement Learn- ing and Control,”Data and Beyond, Medium
-
[6]
Mineflayer: Create Minecraft bots with a powerful, stable, and high-level JavaScript and Python API,
PrismarineJS, “Mineflayer: Create Minecraft bots with a powerful, stable, and high-level JavaScript and Python API,” GitHub repository. [Online]. Available: https://github.com/PrismarineJS/mineflayer
-
[7]
Baritone: Google Maps for Blockheads,
Cabaletta, “Baritone: Google Maps for Blockheads,” GitHub repository. [Online]. Available: https://github.com/cabaletta/baritone
-
[8]
Hi- erarchical Reinforcement Learning Method for Autonomous Vehicle Behavior Planning,
Z. Qiao, Z. Tyree, P. Mudalige, J. Schneider, and J. M. Dolan, “Hi- erarchical Reinforcement Learning Method for Autonomous Vehicle Behavior Planning,” arXiv preprint arXiv:1911.03799, Nov. 2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.