Recognition: 3 theorem links
· Lean TheoremHumanSplatHMR: Closing the Loop Between Human Mesh Recovery and Gaussian Splatting Avatar
Pith reviewed 2026-05-08 18:16 UTC · model grok-4.3
The pith
Joint optimization refines 3D human poses by routing rendering losses back through a Gaussian splatting avatar.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
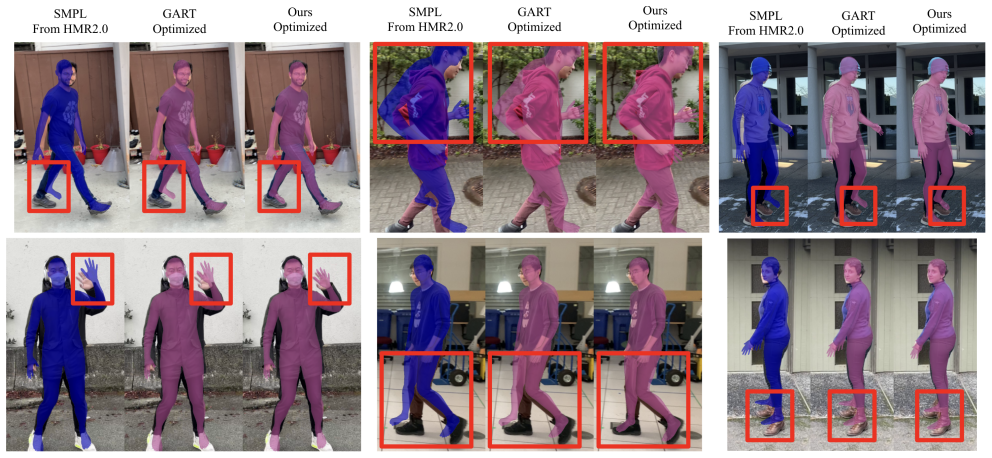
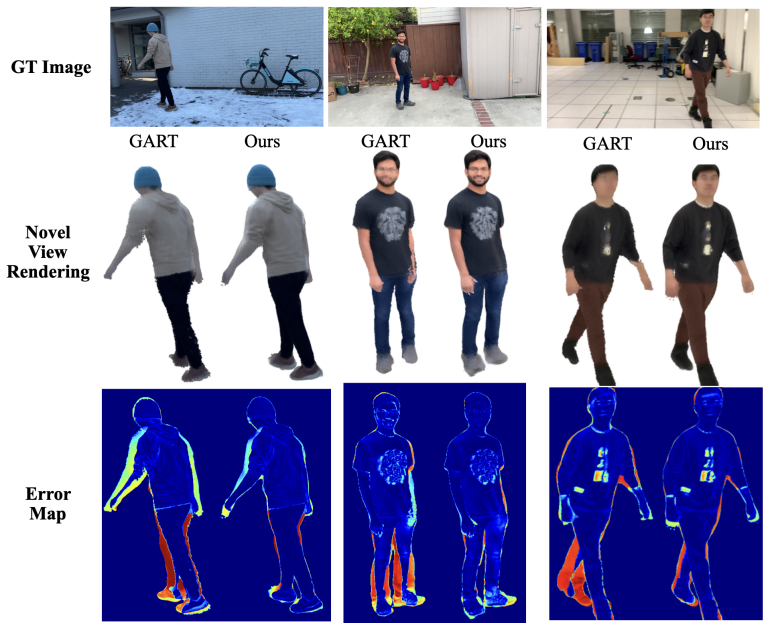
HumanSplatHMR is a joint optimization framework that simultaneously refines 3D human poses and learns a Gaussian splatting avatar by backpropagating photometric, segmentation, and depth losses through a differentiable renderer to the pose parameters and global position. The method begins with human mesh estimates from a standard pose estimator rather than mocap or offline refinement, then uses the rendering losses to correct pose drift over time, yielding improved alignment and higher-fidelity novel-view and novel-pose synthesis.
What carries the argument
The differentiable renderer that propagates image-level losses from the Gaussian splatting avatar back to the underlying SMPL-style pose parameters, allowing the avatar reconstruction to serve as a supervisory signal for geometric pose refinement.
Load-bearing premise
Backpropagating photometric, segmentation, and depth losses through the renderer will stably improve global 3D poses without introducing instability or local minima that degrade the final avatar.
What would settle it
A set of in-the-wild videos in which the jointly optimized poses produce higher error against ground-truth motion capture or yield visibly worse novel-view renderings than the same avatar trained with fixed initial poses.
Figures




read the original abstract
Accurately recovering human pose and appearance from video is an essential component of scene reconstruction, with applications to motion capture, motion prediction, virtual reality, and digital twinning. Despite significant interest in building realistic human avatars from video, this paper demonstrates that existing methods do not accurately recover the 3D geometry of humans. ViT-based approaches are not consistently reliable and can overfit to 2D views, while NeRF- and Gaussian Splatting-based avatars treat pose and appearance separately, limiting rendering generalization to new poses. To resolve these shortcomings, this paper proposes HumanSplatHMR, a joint optimization framework that refines 3D human poses while simultaneously learning a high-fidelity avatar for novel-view and novel-pose synthesis. Our key insight is to close the loop between geometric pose estimation and differentiable rendering. Unlike prior human avatar methods that rely on accurate human pose obtained through motion capture systems or offline refinement, which are impractical in in-the-wild scenarios, our approach uses only human mesh estimates from a state-of-the-art human pose estimator to better reflect real-world conditions. Therefore, instead of using the human pose only as a deformation prior, HumanSplatHMR backpropagates photometric, segmentation, and depth losses through a differentiable renderer to the pose parameters and global position. This coupling refines the global 3D pose over time, improving accuracy and alignment while producing better renderings from novel views. Experiments show consistent improvements over pose recovery baselines that omit image-level refinement and avatar baselines that decouple pose estimation from avatar reconstruction.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes HumanSplatHMR, a joint optimization framework for human mesh recovery and Gaussian Splatting avatar reconstruction from video. It starts from initial 3D poses provided by a ViT-based estimator and refines them by backpropagating photometric, segmentation, and depth losses through a differentiable renderer to the pose parameters and global translation, while simultaneously learning the avatar for improved novel-view and novel-pose synthesis. The central claim is that this closed-loop coupling yields more accurate poses and higher-quality renderings than decoupled baselines.
Significance. If the joint optimization reliably converges and produces measurable gains, the approach would address a practical limitation in in-the-wild avatar creation by removing the need for motion-capture or offline pose refinement. It could improve generalization in applications such as VR and digital twinning, provided the reported improvements hold under rigorous evaluation.
major comments (2)
- [Method (optimization loop)] The central claim that backpropagating photometric/segmentation/depth losses through the differentiable renderer will refine global 3D poses without instability rests on the assumption of sufficiently smooth and informative gradients from the pose-conditioned Gaussian deformation field. Small pose perturbations can induce abrupt splat reordering or visibility changes, producing noisy or vanishing gradients; the manuscript provides no description of gradient clipping, pose regularization, or multi-stage schedules that would mitigate this risk.
- [Experiments] The abstract asserts 'consistent improvements' over pose-recovery and decoupled-avatar baselines, yet the provided text contains no quantitative tables, error bars, ablation studies on loss weights, or dataset-specific metrics. Without these, it is impossible to determine whether the gains are statistically significant or robust to the free parameters (photometric, segmentation, and depth loss weights).
minor comments (2)
- [Method] Clarify the exact parameterization of the Gaussian deformation field (how SMPL pose parameters map to per-Gaussian rotations, positions, and opacities) and whether any additional regularization is applied to the root translation.
- [Introduction] The abstract mentions 'human mesh estimates from a state-of-the-art human pose estimator' but does not name the specific model or its training data; this detail should be added for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the thoughtful and constructive feedback. We address each major comment point by point below and will revise the manuscript to incorporate the suggested clarifications and additional analyses.
read point-by-point responses
-
Referee: [Method (optimization loop)] The central claim that backpropagating photometric/segmentation/depth losses through the differentiable renderer will refine global 3D poses without instability rests on the assumption of sufficiently smooth and informative gradients from the pose-conditioned Gaussian deformation field. Small pose perturbations can induce abrupt splat reordering or visibility changes, producing noisy or vanishing gradients; the manuscript provides no description of gradient clipping, pose regularization, or multi-stage schedules that would mitigate this risk.
Authors: We agree that gradient stability is essential for reliable joint optimization and that the manuscript should explicitly address potential issues arising from splat reordering and visibility changes. The current version describes the overall backpropagation through the differentiable renderer but does not detail the stabilization mechanisms. In the revision we will add a new subsection under the optimization framework that specifies: (1) a multi-stage schedule that first optimizes avatar parameters with fixed poses before jointly refining poses, (2) an L2 regularization term on pose deltas to discourage large perturbations, and (3) gradient clipping applied to the pose and translation gradients. These additions will make the convergence behavior transparent and directly respond to the concern. revision: yes
-
Referee: [Experiments] The abstract asserts 'consistent improvements' over pose-recovery and decoupled-avatar baselines, yet the provided text contains no quantitative tables, error bars, ablation studies on loss weights, or dataset-specific metrics. Without these, it is impossible to determine whether the gains are statistically significant or robust to the free parameters (photometric, segmentation, and depth loss weights).
Authors: The referee is correct that the version provided for review lacked the full quantitative results. The manuscript text supplied to the referee contained only the high-level claim in the abstract and a brief statement in the experiments paragraph. We will expand the Experiments section with: (i) full tables reporting MPJPE, PA-MPJPE, PSNR, SSIM, and LPIPS on multiple datasets with standard deviations across three random seeds, (ii) ablation tables varying the photometric, segmentation, and depth loss weights, and (iii) statistical significance tests (paired t-tests) against the baselines. These additions will allow readers to assess both the magnitude and robustness of the reported gains. revision: yes
Circularity Check
No circularity: joint optimization uses external losses and initial poses from independent estimator
full rationale
The paper's core claim is a joint optimization that starts from initial human mesh estimates produced by an external state-of-the-art pose estimator and then back-propagates standard photometric, segmentation, and depth losses (derived directly from input video frames) through a differentiable renderer to refine pose parameters and learn the Gaussian avatar. This is a conventional end-to-end training loop with no reduction of the output to a self-defined quantity, no fitted parameter renamed as a prediction, and no load-bearing self-citation or ansatz imported from prior author work. The derivation chain remains self-contained against external video data and does not collapse to its inputs by construction.
Axiom & Free-Parameter Ledger
free parameters (1)
- loss weights for photometric, segmentation, and depth terms
axioms (1)
- domain assumption Differentiable renderer produces accurate gradients for pose parameters
Lean theorems connected to this paper
-
IndisputableMonolith.Cost / Foundation.AlphaCoordinateFixationJ_uniquely_calibrated_via_higher_derivative unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
HumanSplatHMR backpropagates photometric, segmentation, and depth losses through a differentiable renderer to the pose parameters and global position.
-
IndisputableMonolith.Foundation.BranchSelectionbranch_selection unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
L = L_color + λ_depth L_depth + λ_CAMEL L_CAMEL (with sub-weights λ1..λ4 inside CAMEL)
-
IndisputableMonolith.Cost.FunctionalEquationwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Loss terms include log(s_t/s_n) − log τ flatness regularization and Huber penalty on Gaussian-to-depth distances.
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Keep it smpl: Automatic estimation of 3d human pose and shape from a single image
Federica Bogo, Angjoo Kanazawa, Christoph Lassner, Peter Gehler, Javier Romero, and Michael J Black. Keep it smpl: Automatic estimation of 3d human pose and shape from a single image. InEuropean conference on computer vision, pages 561–578. Springer, 2016. 2, 4, 6
2016
-
[2]
Meva: A large-scale multiview, multimodal video dataset for activity detection
Kellie Corona, Katie Osterdahl, Roderic Collins, and An- thony Hoogs. Meva: A large-scale multiview, multimodal video dataset for activity detection. InProceedings of the IEEE/CVF winter conference on applications of computer vision, pages 1060–1068, 2021. 2
2021
-
[3]
Tokenhmr: Advancing human mesh re- covery with a tokenized pose representation
Sai Kumar Dwivedi, Yu Sun, Priyanka Patel, Yao Feng, and Michael J Black. Tokenhmr: Advancing human mesh re- covery with a tokenized pose representation. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 1323–1333, 2024. 2
2024
-
[4]
Humans in 4d: Re- constructing and tracking humans with transformers
Shubham Goel, Georgios Pavlakos, Jathushan Rajasegaran, Angjoo Kanazawa, and Jitendra Malik. Humans in 4d: Re- constructing and tracking humans with transformers. In Proceedings of the IEEE/CVF International Conference on Computer Vision, pages 14783–14794, 2023. 1, 2, 4, 6, 8
2023
-
[5]
Sugar: Surface- aligned gaussian splatting for efficient 3d mesh reconstruc- tion and high-quality mesh rendering
Antoine Gu ´edon and Vincent Lepetit. Sugar: Surface- aligned gaussian splatting for efficient 3d mesh reconstruc- tion and high-quality mesh rendering. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 5354–5363, 2024. 4
2024
-
[6]
Gauhuman: Articu- lated gaussian splatting from monocular human videos
Shoukang Hu, Tao Hu, and Ziwei Liu. Gauhuman: Articu- lated gaussian splatting from monocular human videos. In Proceedings of the IEEE/CVF conference on computer vi- sion and pattern recognition, pages 20418–20431, 2024. 2, 3, 4, 7
2024
-
[7]
2d gaussian splatting for geometrically ac- curate radiance fields
Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, and Shenghua Gao. 2d gaussian splatting for geometrically ac- curate radiance fields. InACM SIGGRAPH 2024 conference papers, pages 1–11, 2024. 4
2024
-
[8]
Robust estimation of a location parameter
Peter J Huber. Robust estimation of a location parameter. In Breakthroughs in statistics: Methodology and distribution, pages 492–518. Springer, 1992. 5
1992
-
[9]
Catalin Ionescu, Dragos Papava, Vlad Olaru, and Cristian Sminchisescu. Human3. 6m: Large scale datasets and pre- dictive methods for 3d human sensing in natural environ- ments.IEEE transactions on pattern analysis and machine intelligence, 36(7):1325–1339, 2013. 6
2013
-
[10]
Fast automatic skinning transformations
Alec Jacobson, Ilya Baran, Ladislav Kavan, Jovan Popovi ´c, and Olga Sorkine. Fast automatic skinning transformations. ACM Transactions on Graphics (ToG), 31(4):1–10, 2012. 2
2012
-
[11]
In- stantavatar: Learning avatars from monocular video in 60 seconds
Tianjian Jiang, Xu Chen, Jie Song, and Otmar Hilliges. In- stantavatar: Learning avatars from monocular video in 60 seconds. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 16922– 16932, 2023. 2, 6
2023
-
[12]
Neuman: Neural human radiance field from a single video
Wei Jiang, Kwang Moo Yi, Golnoosh Samei, Oncel Tuzel, and Anurag Ranjan. Neuman: Neural human radiance field from a single video. InEuropean Conference on Computer Vision, pages 402–418. Springer, 2022. 6
2022
-
[13]
End-to-end recovery of human shape and pose
Angjoo Kanazawa, Michael J Black, David W Jacobs, and Jitendra Malik. End-to-end recovery of human shape and pose. InProceedings of the IEEE conference on computer vision and pattern recognition, pages 7122–7131, 2018. 2, 6
2018
-
[14]
Learning 3d human dynamics from video
Angjoo Kanazawa, Jason Y Zhang, Panna Felsen, and Jiten- dra Malik. Learning 3d human dynamics from video. In Proceedings of the IEEE/CVF conference on computer vi- sion and pattern recognition, pages 5614–5623, 2019. 2
2019
-
[15]
3d gaussian splatting for real-time radiance field rendering.ACM Trans
Bernhard Kerbl, Georgios Kopanas, Thomas Leimk ¨uhler, and George Drettakis. 3d gaussian splatting for real-time radiance field rendering.ACM Trans. Graph., 42(4):139–1,
-
[16]
Autosplat: Constrained gaussian splatting for autonomous driving scene reconstruction
Mustafa Khan, Hamidreza Fazlali, Dhruv Sharma, Tongtong Cao, Dongfeng Bai, Yuan Ren, and Bingbing Liu. Autosplat: Constrained gaussian splatting for autonomous driving scene reconstruction. In2025 IEEE International Conference on Robotics and Automation (ICRA), pages 8315–8321. IEEE,
-
[17]
Vibe: Video inference for human body pose and shape estimation
Muhammed Kocabas, Nikos Athanasiou, and Michael J Black. Vibe: Video inference for human body pose and shape estimation. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 5253–5263, 2020. 2
2020
-
[18]
Hugs: Human gaussian splats
Muhammed Kocabas, Jen-Hao Rick Chang, James Gabriel, Oncel Tuzel, and Anurag Ranjan. Hugs: Human gaussian splats. InProceedings of the IEEE/CVF conference on com- puter vision and pattern recognition, pages 505–515, 2024. 2, 3, 4, 7
2024
-
[19]
Learning to reconstruct 3d human pose and shape via model-fitting in the loop
Nikos Kolotouros, Georgios Pavlakos, Michael J Black, and Kostas Daniilidis. Learning to reconstruct 3d human pose and shape via model-fitting in the loop. InProceedings of the IEEE/CVF international conference on computer vision, pages 2252–2261, 2019. 2
2019
-
[20]
Sad-gs: Shape-aligned depth- supervised gaussian splatting
Pou-Chun Kung, Seth Isaacson, Ram Vasudevan, and Katherine A Skinner. Sad-gs: Shape-aligned depth- supervised gaussian splatting. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 2842–2851, 2024. 4
2024
-
[21]
Gart: Gaussian articulated template mod- els
Jiahui Lei, Yufu Wang, Georgios Pavlakos, Lingjie Liu, and Kostas Daniilidis. Gart: Gaussian articulated template mod- els. InProceedings of the IEEE/CVF conference on com- puter vision and pattern recognition, pages 19876–19887,
-
[22]
Splatface: Gaus- sian splat face reconstruction leveraging an optimizable sur- face
Jiahao Luo, Jing Liu, and James Davis. Splatface: Gaus- sian splat face reconstruction leveraging an optimizable sur- face. In2025 IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), pages 774–783. IEEE, 2025. 4
2025
-
[23]
Nerf: Representing scenes as neural radiance fields for view syn- thesis.Communications of the ACM, 65(1):99–106, 2021
Ben Mildenhall, Pratul P Srinivasan, Matthew Tancik, Jonathan T Barron, Ravi Ramamoorthi, and Ren Ng. Nerf: Representing scenes as neural radiance fields for view syn- thesis.Communications of the ACM, 65(1):99–106, 2021. 2
2021
-
[24]
ihuman: Instant animatable digital humans from monocular videos
Pramish Paudel, Anubhav Khanal, Danda Pani Paudel, Jyoti Tandukar, and Ajad Chhatkuli. ihuman: Instant animatable digital humans from monocular videos. InEuropean Con- ference on Computer Vision, pages 304–323. Springer, 2024. 2, 3, 7
2024
-
[25]
Neural body: 9 Implicit neural representations with structured latent codes for novel view synthesis of dynamic humans
Sida Peng, Yuanqing Zhang, Yinghao Xu, Qianqian Wang, Qing Shuai, Hujun Bao, and Xiaowei Zhou. Neural body: 9 Implicit neural representations with structured latent codes for novel view synthesis of dynamic humans. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 9054–9063, 2021. 2
2021
-
[26]
Unidepthv2: Universal monocular metric depth estimation made simpler
Luigi Piccinelli, Christos Sakaridis, Yung-Hsu Yang, Mat- tia Segu, Siyuan Li, Wim Abbeloos, and Luc Van Gool. Unidepthv2: Universal monocular metric depth estimation made simpler.arXiv preprint arXiv:2502.20110, 2025. 5, 6
-
[27]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman R¨adle, Chloe Rolland, Laura Gustafson, et al. Sam 2: Segment anything in images and videos.arXiv preprint arXiv:2408.00714, 2024. 5, 6
work page internal anchor Pith review arXiv 2024
-
[28]
Splattingavatar: Realistic real-time human avatars with mesh-embedded gaussian splatting
Zhijing Shao, Zhaolong Wang, Zhuang Li, Duotun Wang, Xiangru Lin, Yu Zhang, Mingming Fan, and Zeyu Wang. Splattingavatar: Realistic real-time human avatars with mesh-embedded gaussian splatting. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 1606–1616, 2024. 2, 3, 4, 7
2024
-
[29]
Recovering ac- curate 3d human pose in the wild using imus and a moving camera
Timo V on Marcard, Roberto Henschel, Michael J Black, Bodo Rosenhahn, and Gerard Pons-Moll. Recovering ac- curate 3d human pose in the wild using imus and a moving camera. InProceedings of the European conference on com- puter vision (ECCV), pages 601–617, 2018. 6
2018
-
[30]
Bovik, H.R
Zhou Wang, A.C. Bovik, H.R. Sheikh, and E.P. Simoncelli. Image quality assessment: from error visibility to structural similarity.IEEE Transactions on Image Processing, 13(4): 600–612, 2004. 5
2004
-
[31]
Gomavatar: Efficient an- imatable human modeling from monocular video using gaussians-on-mesh
Jing Wen, Xiaoming Zhao, Zhongzheng Ren, Alexander G Schwing, and Shenlong Wang. Gomavatar: Efficient an- imatable human modeling from monocular video using gaussians-on-mesh. InProceedings of the IEEE/CVF Con- ference on Computer Vision and Pattern Recognition, pages 2059–2069, 2024. 2, 3, 4, 7
2059
-
[32]
Hu- mannerf: Free-viewpoint rendering of moving people from monocular video
Chung-Yi Weng, Brian Curless, Pratul P Srinivasan, Jonathan T Barron, and Ira Kemelmacher-Shlizerman. Hu- mannerf: Free-viewpoint rendering of moving people from monocular video. InProceedings of the IEEE/CVF con- ference on computer vision and pattern Recognition, pages 16210–16220, 2022. 2
2022
-
[33]
Reconstructing humans with a biome- chanically accurate skeleton
Yan Xia, Xiaowei Zhou, Etienne V ouga, Qixing Huang, and Georgios Pavlakos. Reconstructing humans with a biome- chanically accurate skeleton. InProceedings of the Com- puter Vision and Pattern Recognition Conference, pages 5355–5365, 2025. 2
2025
-
[34]
Animatable nerf dynamic detail enhancement based on residual deformation field with progressive training
Menglei Yang, Yuhang Han, Shenhao Zhang, and Xiaohui Zhang. Animatable nerf dynamic detail enhancement based on residual deformation field with progressive training. In 2025 5th International Conference on Computer Graphics, Image and Virtualization (ICCGIV), pages 161–165. IEEE,
2025
-
[35]
Yuchen Yang, Linfeng Dong, Wei Wang, Zhihang Zhong, and Xiao Sun. Learnable smplify: A neural solution for optimization-free human pose inverse kinematics.arXiv preprint arXiv:2508.13562, 2025. 2
-
[36]
Decoupling human and camera motion from videos in the wild
Vickie Ye, Georgios Pavlakos, Jitendra Malik, and Angjoo Kanazawa. Decoupling human and camera motion from videos in the wild. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 21222–21232, 2023. 2
2023
-
[37]
Film and television animation pro- duction technology based on expression transfer and virtual digital human.Scalable Computing: Practice and Experi- ence, 25(6):5560–5567, 2024
Ning Zhang and Belei Pu. Film and television animation pro- duction technology based on expression transfer and virtual digital human.Scalable Computing: Practice and Experi- ence, 25(6):5560–5567, 2024. 2 10
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.