Recognition: unknown
Exact and Approximate Algorithms for Polytree Learning
Pith reviewed 2026-05-07 14:08 UTC · model grok-4.3
The pith
An algorithm finds the optimal polytree in O((2+ε)^n) time for any small ε when the maximum in-degree is a fixed constant, improving on the prior O(3^n) bound.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
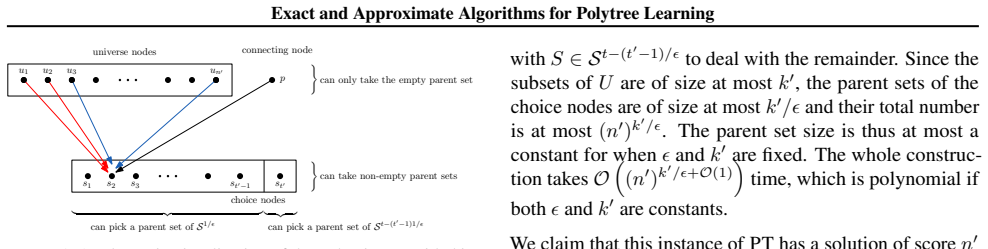
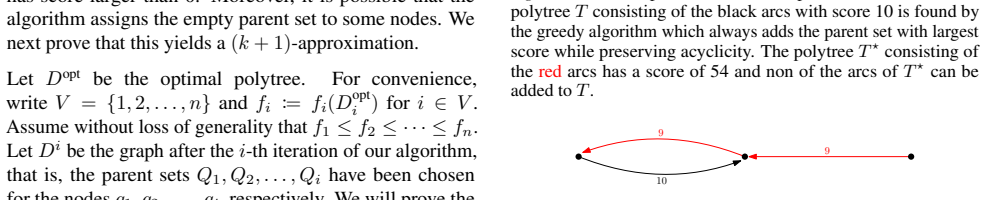
We devise an algorithm that finds the optimal polytree in time O((2+ε)^n) for arbitrarily small ε > 0 and any constant in-degree bound k, improving over the fastest previously known algorithm of time complexity O(3^n). We further give polynomial-time algorithms for finding a polytree whose score is within a factor of k from the optimal one for arbitrary scores and a factor of 2 for additive ones. Many of the results are complemented by (nearly) tight lower bounds for either the time complexity or the approximation factors.
What carries the argument
An exponential-time enumeration procedure refined by the constant in-degree bound k that reduces the search space over possible directed forests while scoring each candidate polytree.
If this is right
- Exact optimal polytrees become searchable in time only slightly above 2^n rather than 3^n when in-degree is bounded by a constant.
- Polynomial-time algorithms exist that return a polytree scoring within factor k of optimal for any score function.
- For additive score functions the approximation guarantee improves to a factor of 2 while remaining polynomial-time.
- Nearly matching lower bounds show that the stated time and approximation ratios cannot be improved substantially without new techniques.
Where Pith is reading between the lines
- These bounds suggest that bounded-degree polytree learning could become feasible for moderate numbers of variables in settings where exact optimality matters.
- The separation between general and additive scores points to a potential avenue for better approximations when the score function has additive structure.
- The results may extend to other restricted Bayesian network classes if similar degree or structural bounds can be imposed.
- Without the constant in-degree assumption the problem stays NP-hard, so degree bounds appear essential for sub-3^n exact algorithms.
Load-bearing premise
The maximum in-degree k must be a fixed constant that does not grow with the number of variables n.
What would settle it
A concrete family of polytree-learning instances with fixed constant k where every exact algorithm requires Ω(3^n) time or where no polynomial-time algorithm can guarantee an approximation factor better than k for arbitrary scores.
Figures



read the original abstract
Polytrees are a subclass of Bayesian networks that seek to capture the conditional dependencies between a set of $n$ variables as a directed forest and are motivated by their more efficient inference and improved interpretability. Since the problem of learning the best polytree is NP-hard, we study which restrictions make it more tractable by considering for example in-degree bounds, properties of score functions measuring the quality of a polytree, and approximation algorithms. We devise an algorithm that finds the optimal polytree in time $O((2+\epsilon)^n)$ for arbitrarily small $\epsilon > 0$ and any constant in-degree bound $k$, improving over the fastest previously known algorithm of time complexity $O(3^n)$. We further give polynomial-time algorithms for finding a polytree whose score is within a factor of $k$ from the optimal one for arbitrary scores and a factor of $2$ for additive ones. Many of the results are complemented by (nearly) tight lower bounds for either the time complexity or the approximation factors.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents exact and approximate algorithms for learning optimal polytrees (a subclass of Bayesian networks) under bounded in-degree. It claims an O((2+ε)^n)-time exact algorithm for any fixed constant in-degree bound k (improving on the prior O(3^n) bound), polynomial-time approximation algorithms achieving a factor-k guarantee for arbitrary scores and a factor-2 guarantee for additive scores, and nearly tight lower bounds on time complexity and approximation factors.
Significance. If the results hold, the work advances the algorithmic foundations of Bayesian network structure learning by improving exact solvability for polytrees under natural restrictions and supplying practical approximation guarantees that distinguish arbitrary versus additive scores. The matching lower bounds add value by clarifying optimality.
Simulated Author's Rebuttal
We thank the referee for their positive summary of our work and for recommending acceptance. The report contains no major comments requiring a point-by-point response.
Circularity Check
No significant circularity
full rationale
The paper presents new algorithmic constructions for exact and approximate polytree learning under constant in-degree bounds, along with matching lower bounds. These rely on standard dynamic programming over subsets, graph-theoretic reductions, and NP-hardness arguments that are independent of the target results. No self-definitional equations, fitted parameters renamed as predictions, or load-bearing self-citations appear in the derivation chain; the O((2+ε)^n) bound and approximation factors are derived from explicit algorithmic designs rather than by construction from prior outputs or assumptions internal to the paper.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Learning the optimal polytree is NP-hard
- standard math Polytrees admit efficient dynamic-programming or search techniques when in-degree is bounded
Reference graph
Works this paper leans on
-
[1]
Inapproximability of vertex cover and independent set in bounded degree graphs
Austrin, P., Khot, S., and Safra, M. Inapproximability of vertex cover and independent set in bounded degree graphs. In Proceedings of the 24th Annual IEEE Conference on Computational Complexity (CCC 2009), pp.\ 74--80, 2009
2009
-
[2]
Chickering, D. M. Learning B ayesian networks is NP -complete. In Learning from Data: Artificial Intelligence and Statistics V (AISTATS 1995), pp.\ 121--130. Springer, 1995
1995
-
[3]
Cooper, G. F. and Herskovits, E. A B ayesian method for the induction of probabilistic networks from data. Mach. Learn., 9: 0 309--347, 1992
1992
-
[4]
On problems as hard as CNF-SAT
Cygan, M., Dell, H., Lokshtanov, D., Marx, D., Nederlof, J., Okamoto, Y., Paturi, R., Saurabh, S., and Wahlstr \" o m, M. On problems as hard as CNF-SAT . ACM Trans. Algorithms , 12 0 (3): 0 41:1--41:24, 2016
2016
-
[5]
Learning polytrees
Dasgupta, S. Learning polytrees. In Proceedings of the Fifteenth Conference on Uncertainty in Artificial Intelligence ( UAI 1999) , pp.\ 134--141. Morgan Kaufmann, 1999
1999
-
[6]
Optimum branchings
Edmonds, J. Optimum branchings. J. Res. Natl. Bur. Stand. B, 71 0 (4): 0 233--240, 1967
1967
-
[7]
A., and Frangi, A
Fehri, H., Gooya, A., Lu, Y., Meijering, E., Johnston, S. A., and Frangi, A. F. Bayesian polytrees with learned deep features for multi-class cell segmentation. IEEE Trans. Image Process. , 28 0 (7): 0 3246--3260, 2019
2019
-
[8]
Parameterized complexity in machine learning
Ganian, R. Parameterized complexity in machine learning. Comput. Sci. Rev., 59: 0 100836, 2026
2026
-
[9]
and Korchemna, V
Ganian, R. and Korchemna, V. The complexity of B ayesian N etwork L earning: R evisiting the superstructure. In Proceedings of the 35th Annual Conference on Neural Information Processing Systems ( NeurIPS 2021) , pp.\ 430--442, 2021
2021
-
[10]
Ganian, R. and Korchemna, V. The complexity of B ayesian N etwork L earning: R evisiting the superstructure. CoRR, abs/2602.10253, 2026
-
[11]
On finding optimal polytrees
Gaspers, S., Koivisto, M., Liedloff, M., Ordyniak, S., and Szeider, S. On finding optimal polytrees. Theor. Comput. Sci., 592: 0 49--58, 2015
2015
-
[12]
and Komusiewicz, C
Gr \" u ttemeier, N. and Komusiewicz, C. Learning B ayesian networks under sparsity constraints: A parameterized complexity analysis. J. Artif. Intell. Res., 74: 0 1225--1267, 2022
2022
-
[13]
On the parameterized complexity of polytree learning
Gr \" u ttemeier, N., Komusiewicz, C., and Morawietz, N. On the parameterized complexity of polytree learning. In Proceedings of the Thirtieth International Joint Conference on Artificial Intelligence ( IJCAI 2021) , pp.\ 4221--4227. ijcai.org, 2021 a
2021
-
[14]
Efficient B ayesian network structure learning via parameterized local search on topological orderings
Gr \" u ttemeier, N., Komusiewicz, C., and Morawietz, N. Efficient B ayesian network structure learning via parameterized local search on topological orderings. In Proceedings of the Thirty-Fifth AAAI Conference on Artificial Intelligence ( AAAI 2021) , pp.\ 12328--12335. AAAI Press, 2021 b
2021
-
[15]
Clique is hard to approximate within n^ 1-
H stad, J. Clique is hard to approximate within n^ 1- . In Proceedings of the 37th Annual Symposium on Foundations of Computer Science ( FOCS 1996) , pp.\ 627--636. IEEE Computer Society, 1996
1996
-
[16]
On the power of unique 2-prover 1-round games
Khot, S. On the power of unique 2-prover 1-round games. In Proceedings of the 17th Annual IEEE Conference on Computational Complexity (CCC 2002) , pp.\ 25. IEEE Computer Society, 2002
2002
-
[17]
Time--approximation trade-offs for learning B ayesian networks
Kundu, M., Parviainen, P., and Saurabh, S. Time--approximation trade-offs for learning B ayesian networks. In Proceedings of The 12th International Conference on Probabilistic Graphical Models (PGM 2024), volume 246 of Proceedings of Machine Learning Research, pp.\ 486--497. PMLR, 2024 a
2024
-
[18]
Discovering B ayesian networks when few variables matter
Kundu, M., Parviainen, P., and Saurabh, S. Discovering B ayesian networks when few variables matter. In Proceedings of the 27th European Conference on Artificial Intelligence ( ECAI 2024) , volume 392 of Frontiers in Artificial Intelligence and Applications, pp.\ 3047--3054. IOS Press, 2024 b
2024
-
[19]
and Szeider, S
Ordyniak, S. and Szeider, S. Parameterized complexity results for exact B ayesian network structure learning. J. Artif. Intell. Res., 46: 0 263--302, 2013
2013
-
[20]
Probabilistic reasoning in intelligent systems - networks of plausible inference
Pearl, J. Probabilistic reasoning in intelligent systems - networks of plausible inference. Morgan K aufmann series in representation and reasoning. Morgan Kaufmann, 1989
1989
-
[21]
On the hardness of approximate reasoning
Roth, D. On the hardness of approximate reasoning. Artif. Intell., 82 0 (1-2): 0 273--302, 1996
1996
-
[22]
P., and Zaffalon, M
Scanagatta, M., Corani, G., de Campos, C. P., and Zaffalon, M. Learning treewidth-bounded bayesian networks with thousands of variables. In Advances in Neural Information Processing Systems 29 (NeurIPS 2016), pp.\ 1462--1470, 2016
2016
-
[23]
Approximation algorithms for restricted B ayesian network structures
Ziegler, V. Approximation algorithms for restricted B ayesian network structures. Inf. Process. Lett., 108 0 (2): 0 60--63, 2008
2008
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.