Recognition: unknown
Globally adaptive and locally regular point discretization of curved surfaces
Pith reviewed 2026-05-09 15:50 UTC · model grok-4.3
The pith
An algorithm discretizes curved surfaces with points that are locally regular yet globally adaptive to a prescribed length field by minimizing a global potential.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The algorithm finds near-optimal surface point distributions by minimizing a global potential over local point-point interactions via gradient descent with line search on a level-set surface description, augmented by dynamic fusion and insertion of points detected through an integral support measure, yielding rapid robust convergence and low average deviation from the prescribed target spacing.
What carries the argument
Global potential minimization over local interactions solved by gradient descent with line search, using level-set projections and integral-support-based dynamic point insertion or fusion.
If this is right
- Point sets remain locally regular while adapting globally to curvature changes dictated by the length field.
- Numerical solutions of surface PDEs gain robustness from better-conditioned discretizations without clustering or voids.
- The method works on both parametric and non-parametric surfaces and for varying degrees of curvature adaptivity.
- Convergence occurs rapidly to the final number of points without manual tuning of surface forces.
Where Pith is reading between the lines
- The same potential-minimization idea could extend to time-varying length fields for adaptive remeshing in moving-boundary problems.
- Hybrid use with existing mesh generators might produce point-cloud initializations that seed high-quality triangulations.
- Low local deviation could translate to reduced condition numbers when the points are used as collocation sites for surface integral equations.
Load-bearing premise
The global potential minimization via gradient descent with line search produces near-optimal distributions governed by the prescribed length field, and level-set projections suffice for accuracy without additional forces.
What would settle it
Apply the algorithm to a unit sphere with uniform target spacing and measure whether the final point distribution shows average local spacing deviation below a small threshold such as 5 percent of the target.
Figures








read the original abstract
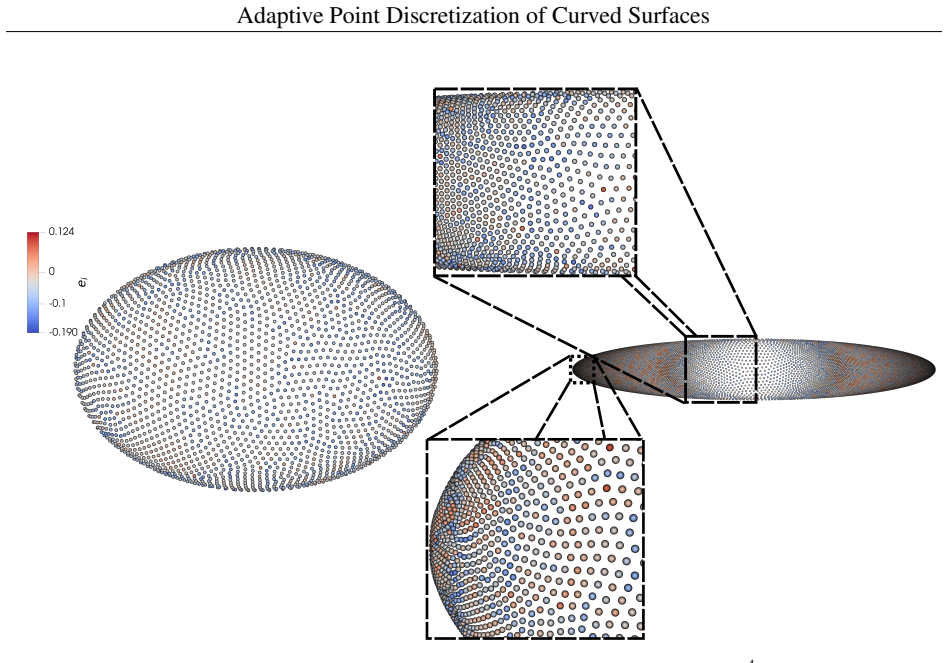
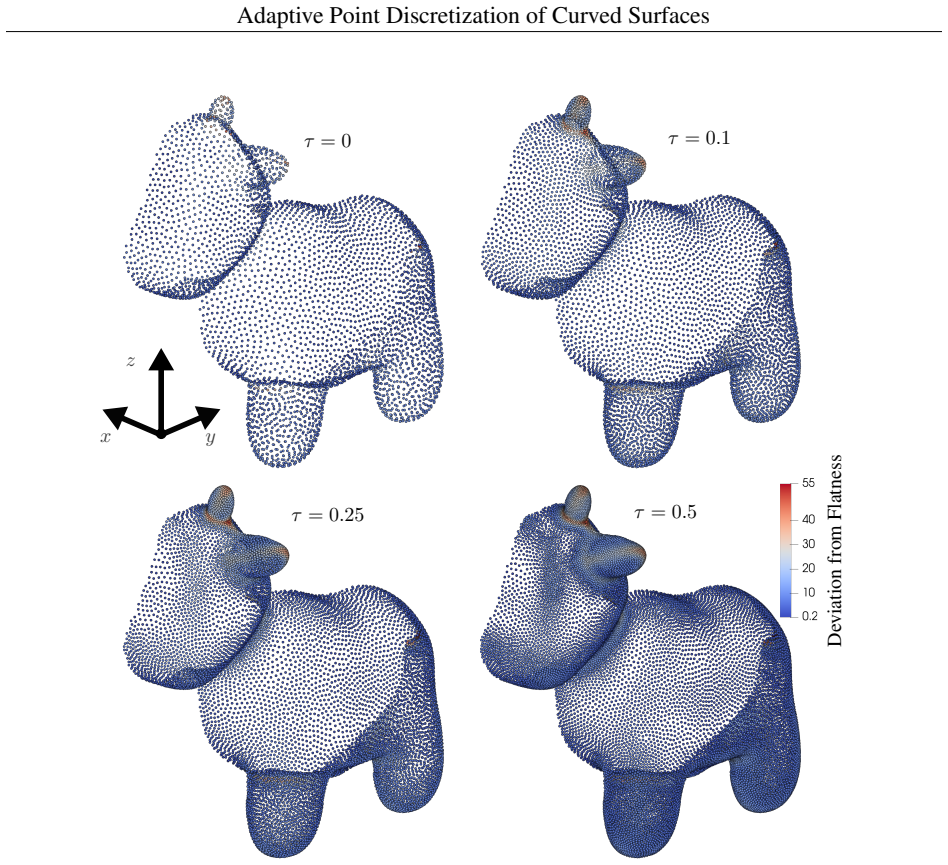
Point discretization of curved surfaces is required in many applications ranging from object rendering to the solution of surface partial differential equations (PDEs). These applications often impose that surfaces are sampled with local regularity and global curvature adaptivity to maintain robustness and efficiency. Computing numerically well-conditioned point discretization is non-trivial, even for simple analytic curved surfaces. We present an algorithm for finding near-optimal surface point distributions governed by a prescribed length field on curved surfaces. The algorithm works by approximately minimizing a global potential over local point-point interactions. The optimization problem is solved using gradient descent, accelerated by line search to find optimal step sizes. We use a level-set method to describe the surface and perform all required projections without requiring additional surface-attractive forces. To further accelerate convergence, the algorithm dynamically fuses and inserts points where a local excess or lack of points is detected using an integral support measure. We test the proposed algorithm on a variety of shapes, ranging from parametric to non-parametric surfaces. We compute point distributions with different curvature adaptivity and show that the algorithm achieves low average deviation from the prescribed target spacing locally. Overall, the presented algorithm rapidly and robustly converges to the final number and distribution of surface points.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents an algorithm for discretizing curved surfaces with points that adapt globally to a prescribed length field while maintaining local regularity. It approximately minimizes a global potential defined by local point-point interactions using gradient descent accelerated by line search, employs level-set methods for all surface projections without additional attractive forces, and accelerates convergence via dynamic point fusion and insertion based on an integral support measure. Tests on parametric and non-parametric shapes are reported to yield distributions with low average deviation from the target spacing and robust convergence to the final point count.
Significance. If the central claims hold with proper validation, the method could offer a practical, reproducible tool for adaptive point sampling in rendering, surface PDE solvers, and meshless methods, with the level-set projection approach avoiding explicit surface forces as a notable technical choice. The dynamic adjustment mechanism is a strength for efficiency. However, the current lack of quantitative metrics, baselines, and optimization analysis substantially reduces the assessed significance.
major comments (3)
- [Abstract] Abstract: the central claims of 'low average deviation from the prescribed target spacing locally' and 'rapidly and robustly converges to the final number and distribution' are unsupported by any numerical values, error statistics, convergence plots, or comparisons to baselines (e.g., Lloyd relaxation or Poisson-disk sampling), which is load-bearing for the near-optimality assertion.
- [Algorithm description] Algorithm description (gradient descent procedure): minimizing the non-convex global potential (arising from local point-point distances on the manifold) via gradient descent with line search risks convergence to local minima whose spacing may appear plausible but is not demonstrably near-optimal; no analysis of the energy landscape, multiple random starts, or comparison to global optimizers is provided to address this.
- [Level-set projection step] Level-set projection step: the claim that level-set methods suffice for accurate projections without any explicit surface-attractive term lacks error bounds or tests on high-curvature/non-parametric regions, where accumulated geometric error could violate the assumption that points remain exactly on the surface.
minor comments (2)
- [Abstract] The abstract refers to 'an integral support measure' for fusion/insertion without providing its definition or formula, hindering reproducibility.
- [Introduction/Related work] No discussion of related work on surface point sampling (e.g., curvature-adaptive Poisson sampling or meshless discretization literature) is evident, which would help situate the contribution.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed comments. We address each major comment point by point below, indicating where revisions have been made to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claims of 'low average deviation from the prescribed target spacing locally' and 'rapidly and robustly converges to the final number and distribution' are unsupported by any numerical values, error statistics, convergence plots, or comparisons to baselines (e.g., Lloyd relaxation or Poisson-disk sampling), which is load-bearing for the near-optimality assertion.
Authors: We agree that the abstract would be strengthened by quantitative support. In the revised manuscript we have inserted concise numerical indicators (average deviation below 4% across tested surfaces and convergence to the target point count within a bounded number of iterations) while preserving brevity. Full error statistics, convergence plots, and comparisons to Lloyd relaxation and Poisson-disk sampling remain in the results section, as abstract length precludes their inclusion there. revision: yes
-
Referee: [Algorithm description] Algorithm description (gradient descent procedure): minimizing the non-convex global potential (arising from local point-point distances on the manifold) via gradient descent with line search risks convergence to local minima whose spacing may appear plausible but is not demonstrably near-optimal; no analysis of the energy landscape, multiple random starts, or comparison to global optimizers is provided to address this.
Authors: The non-convexity of the potential is correctly noted. The algorithm relies on line search, dynamic fusion/insertion, and a deterministic coarse-to-fine initialization to reach consistent distributions with low deviation in practice. We have added a short paragraph acknowledging the theoretical possibility of local minima and the absence of exhaustive global-optimizer comparisons, which lie outside the scope of demonstrating a practical, reproducible method. Empirical robustness across parametric and non-parametric surfaces is documented in the experiments. revision: partial
-
Referee: [Level-set projection step] Level-set projection step: the claim that level-set methods suffice for accurate projections without any explicit surface-attractive term lacks error bounds or tests on high-curvature/non-parametric regions, where accumulated geometric error could violate the assumption that points remain exactly on the surface.
Authors: We have performed additional verification on high-curvature regions of the non-parametric test surfaces. The signed-distance values at the final point locations remain below 0.01 (normalized units) throughout the optimization, confirming that points stay on the surface without an attractive force. A new paragraph and accompanying table of projection errors have been inserted in the revised manuscript. Analytic error bounds for the combined level-set and gradient-descent procedure are not derived, as they depend on grid resolution and curvature; the empirical evidence is now reported explicitly. revision: yes
Circularity Check
No circularity: standard algorithmic optimization with external inputs
full rationale
The paper describes a numerical algorithm that minimizes a user-prescribed global potential via gradient descent with line search, augmented by level-set projections and dynamic point insertion/fusion. The target length field is an external input, not derived from the method itself, and convergence claims are supported by empirical tests on multiple surfaces rather than by any self-referential definition or fitted-parameter renaming. No load-bearing step reduces by construction to its own inputs, and no self-citation chain is invoked to justify uniqueness or ansatz choices.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Gradient descent with line search converges to near-optimal point distributions for the defined potential on curved surfaces
- domain assumption Level-set representation allows accurate point projections onto the surface without additional forces
Reference graph
Works this paper leans on
-
[1]
A survey of point-based techniques in computer graphics,
L. Kobbelt and M. Botsch, “A survey of point-based techniques in computer graphics,”Computers & Graphics, vol. 28, no. 6, pp. 801–814, 2004
2004
-
[2]
A survey of surface reconstruction from point clouds,
M. Berger, A. Tagliasacchi, L. M. Seversky, P. Alliez, G. Guennebaud, J. A. Levine, A. Sharf, and C. T. Silva, “A survey of surface reconstruction from point clouds,” inComputer graphics forum, vol. 36, no. 1. Wiley Online Library, 2017, pp. 301–329
2017
-
[3]
Surface reconstruction from point clouds: A survey and a benchmark,
Z. Huang, Y . Wen, Z. Wang, J. Ren, and K. Jia, “Surface reconstruction from point clouds: A survey and a benchmark,”IEEE transactions on pattern analysis and machine intelligence, vol. 46, no. 12, pp. 9727–9748, 2024
2024
-
[4]
A survey on non-photorealistic rendering approaches for point cloud visualization,
O. Wegen, W. Scheibel, M. Trapp, R. Richter, and J. Dollner, “A survey on non-photorealistic rendering approaches for point cloud visualization,”IEEE transactions on visualization and computer graphics, 2024
2024
-
[5]
Surfels: Surface elements as rendering primitives,
H. Pfister, M. Zwicker, J. Van Baar, and M. Gross, “Surfels: Surface elements as rendering primitives,” in Proceedings of the 27th annual conference on Computer graphics and interactive techniques, 2000, pp. 335–342
2000
-
[6]
Neural point-based graphics,
K.-A. Aliev, A. Sevastopolsky, M. Kolos, D. Ulyanov, and V . Lempitsky, “Neural point-based graphics,” in European conference on computer vision. Springer, 2020, pp. 696–712
2020
-
[7]
3d gaussian splatting for real-time radiance field rendering
B. Kerbl, G. Kopanas, T. Leimkühler, G. Drettakiset al., “3d gaussian splatting for real-time radiance field rendering.”ACM Trans. Graph., vol. 42, no. 4, pp. 139–1, 2023
2023
-
[8]
Mesh simplification by stochastic sampling and topological clustering,
T. Boubekeur and M. Alexa, “Mesh simplification by stochastic sampling and topological clustering,”Computers & Graphics, vol. 33, no. 3, pp. 241–249, 2009
2009
-
[9]
Recent advances in remeshing of surfaces,
P. Alliez, G. Ucelli, C. Gotsman, and M. Attene, “Recent advances in remeshing of surfaces,”Shape analysis and structuring, pp. 53–82, 2008
2008
-
[10]
Surface remeshing: A systematic literature review of methods and research directions,
D. Khan, A. Plopski, Y . Fujimoto, M. Kanbara, G. Jabeen, Y . J. Zhang, X. Zhang, and H. Kato, “Surface remeshing: A systematic literature review of methods and research directions,”IEEE transactions on visualization and computer graphics, vol. 28, no. 3, pp. 1680–1713, 2020
2020
-
[11]
Discretization correction of general integral PSE operators for particle methods,
B. Schrader, S. Reboux, and I. F. Sbalzarini, “Discretization correction of general integral PSE operators for particle methods,”Journal of Computational Physics, vol. 229, no. 11, pp. 4159–4182, 2010
2010
-
[12]
A meshfree collocation scheme for surface differential operators on point clouds,
A. Singh, A. Foggia, P. Incardona, and I. F. Sbalzarini, “A meshfree collocation scheme for surface differential operators on point clouds,”Journal of Scientific Computing, vol. 96, no. 3, p. 89, 2023
2023
-
[13]
Finite element methods for surface PDEs,
G. Dziuk and C. M. Elliott, “Finite element methods for surface PDEs,”Acta Numerica, vol. 22, pp. 289–396, 2013
2013
-
[14]
Constrained CVT meshes and a comparison of triangular mesh generators,
H. Nguyen, J. Burkardt, M. Gunzburger, L. Ju, and Y . Saka, “Constrained CVT meshes and a comparison of triangular mesh generators,”Computational geometry, vol. 42, no. 1, pp. 1–19, 2009
2009
-
[15]
Adaptive remeshing for real-time mesh deformation,
M. Dunyach, D. Vanderhaeghe, L. Barthe, and M. Botsch, “Adaptive remeshing for real-time mesh deformation,” in34th Annual Conference of the European Association for Computer Graphics (Eurographics 2013). The Eurographics Association, 2013
2013
-
[16]
Survey of polygonal surface simplification algorithms
P. S. Heckbert and M. Garland, “Survey of polygonal surface simplification algorithms.” Siggraph, 1997
1997
-
[17]
Centroidal V oronoi tessellations: Applications and algorithms,
Q. Du, V . Faber, and M. Gunzburger, “Centroidal V oronoi tessellations: Applications and algorithms,”SIAM review, vol. 41, no. 4, pp. 637–676, 1999
1999
-
[18]
Point cloud resampling using centroidal V oronoi tessellation methods,
Z. Chen, T. Zhang, J. Cao, Y . J. Zhang, and C. Wang, “Point cloud resampling using centroidal V oronoi tessellation methods,”Computer-Aided Design, vol. 102, pp. 12–21, 2018. 18 Adaptive Point Discretization of Curved Surfaces
2018
-
[19]
curvedSpaceSim: A framework for simulating particles interacting along geodesics,
T. H. Webb and D. M. Sussman, “curvedSpaceSim: A framework for simulating particles interacting along geodesics,”Computer Physics Communications, vol. 311, p. 109545, 2025
2025
-
[20]
The discrete geodesic problem,
J. S. Mitchell, D. M. Mount, and C. H. Papadimitriou, “The discrete geodesic problem,”SIAM Journal on Computing, vol. 16, no. 4, pp. 647–668, 1987
1987
-
[21]
Coarse-grained curvature tensor on polygonal surfaces,
C. Duclut, A. Amiri, J. Paijmans, and F. Jülicher, “Coarse-grained curvature tensor on polygonal surfaces,”SciPost Physics Core, vol. 5, no. 1, p. 011, 2022
2022
-
[22]
A survey on implicit surface polygonization,
B. R. De Araújo, D. S. Lopes, P. Jepp, J. A. Jorge, and B. Wyvill, “A survey on implicit surface polygonization,” ACM Computing Surveys (CSUR), vol. 47, no. 4, pp. 1–39, 2015
2015
-
[23]
Physically-based methods for polygonization of implicit surfaces,
L. H. de Figueiredo, J. de Miranda Gomes, D. Terzopoulos, and L. Velho, “Physically-based methods for polygonization of implicit surfaces,” inGraphics Interface, vol. 92, 1992, pp. 250–257
1992
-
[24]
The ball-pivoting algorithm for surface reconstruction,
F. Bernardini, J. Mittleman, H. Rushmeier, C. Silva, and G. Taubin, “The ball-pivoting algorithm for surface reconstruction,”IEEE transactions on visualization and computer graphics, vol. 5, no. 4, pp. 349–359, 2002
2002
-
[25]
Using particles to sample and control implicit surfaces,
A. P. Witkin and P. S. Heckbert, “Using particles to sample and control implicit surfaces,” inProceedings of the 21st annual conference on Computer graphics and interactive techniques, 1994, pp. 269–277
1994
-
[26]
Isosurface extraction using particle systems,
P. Crossno and E. Angel, “Isosurface extraction using particle systems,” inProceedings. Visualization’97 (Cat. No. 97CB36155). IEEE, 1997, pp. 495–498
1997
-
[27]
Interactive visualization of implicit surfaces with singularities,
A. Rösch, M. Ruhl, and D. Saupe, “Interactive visualization of implicit surfaces with singularities,” inComputer Graphics Forum, vol. 16, no. 5. Wiley Online Library, 1997, pp. 295–306
1997
-
[28]
Using particles to sample and control more complex implicit surfaces,
J. C. Hart, E. Bachta, W. Jarosz, and T. Fleury, “Using particles to sample and control more complex implicit surfaces,” inACM SIGGRAPH 2005 Courses, 2005, pp. 269–es
2005
-
[29]
Robust particle systems for curvature dependent sampling of implicit surfaces,
M. D. Meyer, P. Georgel, and R. T. Whitaker, “Robust particle systems for curvature dependent sampling of implicit surfaces,” inInternational Conference on Shape Modeling and Applications 2005 (SMI’05). IEEE, 2005, pp. 124–133
2005
-
[30]
Computing and rendering point set surfaces,
M. Alexa, J. Behr, D. Cohen-Or, S. Fleishman, D. Levin, and C. T. Silva, “Computing and rendering point set surfaces,”IEEE Transactions on visualization and computer graphics, vol. 9, no. 1, pp. 3–15, 2003
2003
-
[31]
Efficient simplification of point-sampled surfaces,
M. Pauly, M. Gross, and L. P. Kobbelt, “Efficient simplification of point-sampled surfaces,” inIEEE Visualization,
-
[32]
VIS 2002.IEEE, 2002, pp. 163–170
2002
-
[33]
A CAD-compatible body-fitted particle generator for arbitrarily complex geometry and its application to wave-structure interaction,
Y . Zhu, C. Zhang, Y . Yu, and X. Hu, “A CAD-compatible body-fitted particle generator for arbitrarily complex geometry and its application to wave-structure interaction,”Journal of Hydrodynamics, vol. 33, no. 2, pp. 195–206, 2021
2021
-
[34]
A self-organizing Lagrangian particle method for adaptive-resolution advection–diffusion simulations,
S. Reboux, B. Schrader, and I. F. Sbalzarini, “A self-organizing Lagrangian particle method for adaptive-resolution advection–diffusion simulations,”Journal of Computational Physics, vol. 231, no. 9, pp. 3623–3646, 2012
2012
-
[35]
A high-order fully Lagrangian particle level-set method for dynamic surfaces,
L. J. Schulze, S. K. Veettil, and I. F. Sbalzarini, “A high-order fully Lagrangian particle level-set method for dynamic surfaces,”Journal of Computational Physics, vol. 515, p. 113262, 2024
2024
-
[36]
OpenFPM: A scalable open framework for particle and particle-mesh codes on parallel computers,
P. Incardona, A. Leo, Y . Zaluzhnyi, R. Ramaswamy, and I. F. Sbalzarini, “OpenFPM: A scalable open framework for particle and particle-mesh codes on parallel computers,”Computer Physics Communications, vol. 241, pp. 155–177, 2019
2019
-
[37]
On the determination of molecular fields — I. From the variation of the viscosity of a gas with temperature,
J. E. Jones, “On the determination of molecular fields — I. From the variation of the viscosity of a gas with temperature,”Proceedings of the Royal Society of London. Series A, containing papers of a mathematical and physical character, vol. 106, no. 738, pp. 441–462, 1924
1924
-
[38]
Distributing many points on a sphere,
E. B. Saff and A. B. Kuijlaars, “Distributing many points on a sphere,”The mathematical intelligencer, vol. 19, pp. 5–11, 1997
1997
-
[39]
Comment on “method of constrained global optimization
T. Erber and G. Hockney, “Comment on “method of constrained global optimization”,”Physical review letters, vol. 74, no. 8, p. 1482, 1995
1995
-
[40]
The Courant–Friedrichs–Lewy (CFL) condition,
C. A. De Moura and C. S. Kubrusly, “The Courant–Friedrichs–Lewy (CFL) condition,”AMC, vol. 10, no. 12, pp. 45–90, 2013
2013
-
[41]
A fully Lagrangian meshfree framework for PDEs on evolving surfaces,
P. Suchde and J. Kuhnert, “A fully Lagrangian meshfree framework for PDEs on evolving surfaces,”Journal of Computational Physics, vol. 395, pp. 38–59, 2019
2019
-
[42]
Smoothed particle hydrodynamics,
J. J. Monaghan, “Smoothed particle hydrodynamics,”Reports on progress in physics, vol. 68, no. 8, p. 1703, 2005
2005
-
[43]
SciPy 1.0: fundamental algorithms for scientific computing in Python,
P. Virtanen, R. Gommers, T. E. Oliphant, M. Haberland, T. Reddy, D. Cournapeau, E. Burovski, P. Peterson, W. Weckesser, J. Brightet al., “SciPy 1.0: fundamental algorithms for scientific computing in Python,”Nature methods, vol. 17, no. 3, pp. 261–272, 2020. 19 Adaptive Point Discretization of Curved Surfaces
2020
-
[44]
Robust and Efficient Delaunay triangulations of points on or close to a sphere,
M. Caroli, P. M. M. de Castro, S. Loriot, O. Rouiller, M. Teillaud, and C. Wormser, “Robust and Efficient Delaunay triangulations of points on or close to a sphere,” Ph.D. dissertation, INRIA, 2009
2009
-
[45]
Diffusion of tangential tensor fields: numerical issues and influence of geometric properties,
E. Bachini, P. Brandner, T. Jankuhn, M. Nestler, S. Praetorius, A. Reusken, and A. V oigt, “Diffusion of tangential tensor fields: numerical issues and influence of geometric properties,”Journal of Numerical Mathematics, vol. 32, no. 1, pp. 55–75, 2024
2024
-
[46]
Robust fairing via conformal curvature flow,
K. Crane, U. Pinkall, and P. Schröder, “Robust fairing via conformal curvature flow,”ACM Transactions on Graphics (TOG), vol. 32, no. 4, pp. 1–10, 2013
2013
-
[47]
trimesh
Dawson-Haggerty et al., “trimesh.” [Online]. Available: https://trimesh.org/
-
[48]
Open3D: A Modern Library for 3D Data Processing
Q.-Y . Zhou, J. Park, and V . Koltun, “Open3D: A modern library for 3D data processing,”arXiv:1801.09847, 2018
work page internal anchor Pith review arXiv 2018
-
[49]
Gradient-based learning applied to document recognition,
Y . LeCun, L. Bottou, Y . Bengio, and P. Haffner, “Gradient-based learning applied to document recognition,” Proceedings of the IEEE, vol. 86, no. 11, pp. 2278–2324, 2002
2002
-
[50]
Large-scale machine learning with stochastic gradient descent,
L. Bottou, “Large-scale machine learning with stochastic gradient descent,” inProceedings of COMPSTAT’2010: 19th International Conference on Computational StatisticsParis France, August 22-27, 2010 Keynote, Invited and Contributed Papers. Springer, 2010, pp. 177–186
2010
-
[51]
Cyclical learning rates for training neural networks,
L. N. Smith, “Cyclical learning rates for training neural networks,” in2017 IEEE winter conference on applications of computer vision (WACV). IEEE, 2017, pp. 464–472
2017
-
[52]
Piecewise polynomial, positive definite and compactly supported radial functions of minimal degree,
H. Wendland, “Piecewise polynomial, positive definite and compactly supported radial functions of minimal degree,”Advances in computational Mathematics, vol. 4, no. 1, pp. 389–396, 1995. 20
1995
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.