Recognition: unknown
IRON: Implicit Resolvent Optimization under Noise
Pith reviewed 2026-05-08 17:13 UTC · model grok-4.3
The pith
Increasing the implicit stepsize in a resolvent discretization of noisy gradient flows improves contraction and shrinks the stationary mean-square error as O(1/α).
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
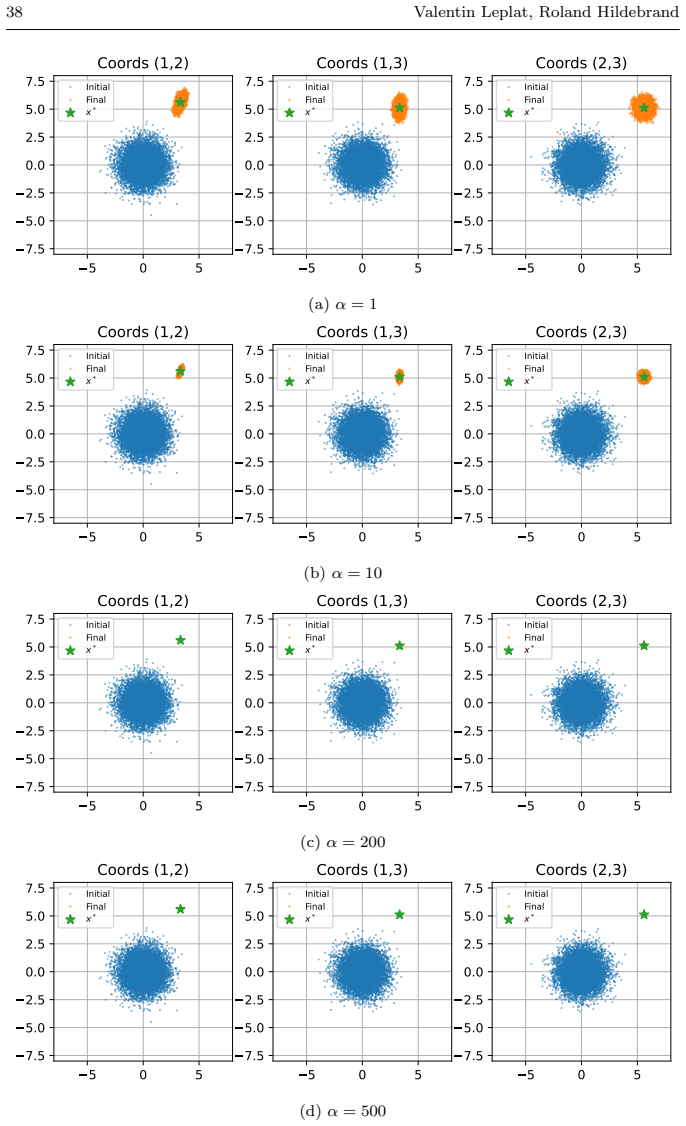
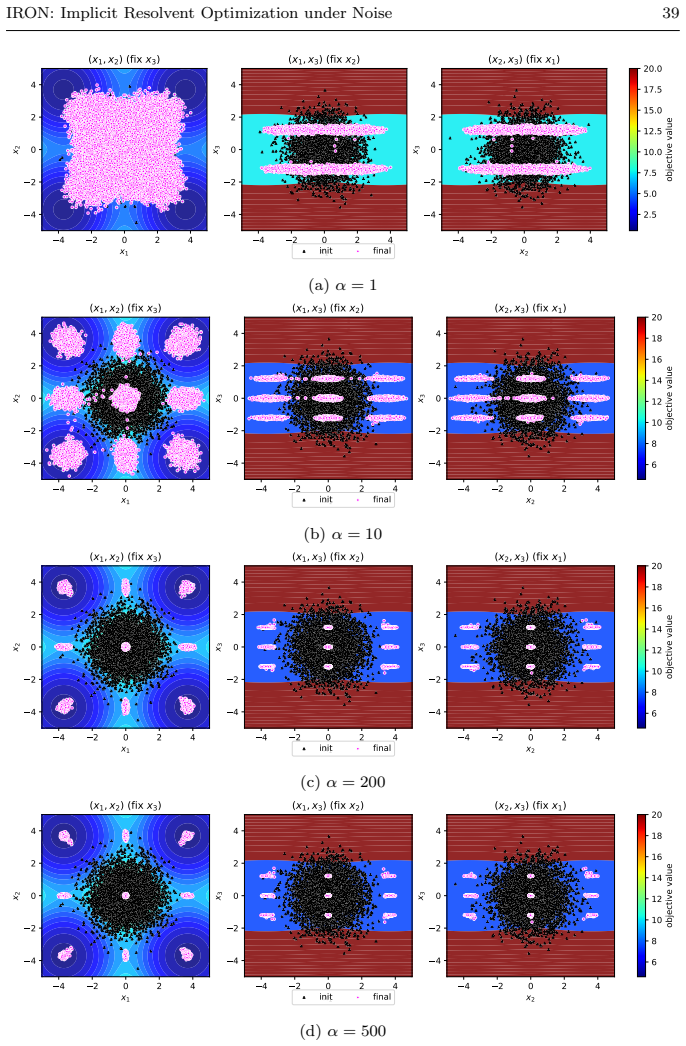
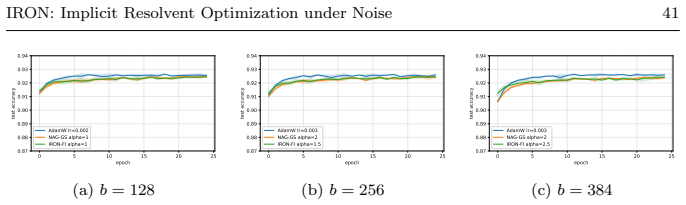
Starting from a noisy accelerated gradient flow and applying a fully implicit Backward-Euler discretization yields a resolvent update whose mean-square recursion contracts more strongly as the implicit stepsize α increases. Under accurate inner solves the stationary mean-square error bound scales as O(1/α) and tends to zero as α tends to infinity. The same qualitative improvement appears in numerical tests for nonconvex and learning problems.
What carries the argument
The fully implicit Backward-Euler resolvent update, with additive noise perturbing the resolvent center, together with the associated Lyapunov mean-square recursion.
If this is right
- For sufficiently large α the mean-square recursion becomes contractive.
- The stationary error bound vanishes in the limit of large α.
- A sharper explicit stationary constant holds in the quadratic case.
- Numerical behavior in nonconvex and learning problems follows the same qualitative pattern.
Where Pith is reading between the lines
- Implicit resolvent methods may therefore be preferred over explicit discretizations when persistent noise limits long-run accuracy.
- In practice the result suggests driving α upward while maintaining inner-solve tolerance.
- The same discretization principle could be tested on other continuous-time stochastic flows, such as those with momentum or higher-order dynamics.
Load-bearing premise
The objective must be smooth and strongly convex and the inner resolvent solves must be sufficiently accurate.
What would settle it
A strongly convex stochastic problem with accurate inner solves where raising the implicit stepsize α fails to improve the contraction factor or to reduce the stationary mean-square error bound.
Figures






read the original abstract
We study stochastic optimization from a joint continuous-discrete point of view. Starting from a second-order stochastic differential equation interpreted as a noisy accelerated gradient flow, we discretize the dynamics by a fully implicit Backward-Euler scheme. This leads to a resolvent, or proximal-type, update, computed in practice through Levenberg-Marquardt, Newton, or trust-region-type inner solves. The resulting method, denoted by $\text{IRON}_{\text{FI}}$, admits a Lyapunov mean-square recursion. The main conclusion is that increasing the implicit stepsize $\alpha$ improves the contraction factor and decreases the stationary mean-square error bound. Under sufficiently accurate inner solves, this bound scales as $O(1/\alpha)$; in particular, for large enough $\alpha$, the recursion is contractive and the stationary error bound vanishes as $\alpha\to\infty$. We establish the theory for smooth strongly convex objectives and provide a sharper quadratic analysis with an explicit stationary constant. The numerical experiments support the theory in the strongly convex case and illustrate the same qualitative behavior in nonconvex and learning settings. To the best of our knowledge, this fully implicit inertial-resolvent discretization, where the noise acts as an additive perturbation of the resolvent center and yields an $O(1/\alpha)$ stationary-MSE law, has not been isolated in this form before. The broader message is that discretization is not only an implementation choice: in stochastic optimization, the numerical integration rule can directly affect the long-time stability of the iterates under noise.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces IRON_FI, obtained by applying a fully implicit Backward-Euler discretization to a second-order SDE for noisy accelerated gradient flow. This yields a resolvent (proximal-type) update solved via Levenberg-Marquardt, Newton or trust-region inner solvers. For smooth strongly convex objectives, a Lyapunov mean-square recursion is derived under the assumption of sufficiently accurate inner solves; the central claim is that the contraction factor improves with the implicit stepsize α and the stationary mean-square error bound scales as O(1/α), vanishing as α→∞. A sharper quadratic analysis with explicit stationary constant is provided, and experiments are reported to support the theory in the strongly convex case while illustrating qualitative behavior in nonconvex and learning settings.
Significance. If the mean-square analysis is rigorous and the inner-solve accuracy assumption can be maintained, the work supplies a concrete example in which the numerical integration rule itself governs long-time stability and error decay under additive noise, rather than merely serving as an implementation detail. The explicit quadratic analysis and the isolation of an O(1/α) stationary-MSE law constitute genuine strengths that could influence the design of implicit schemes for stochastic optimization.
major comments (2)
- [mean-square recursion derivation] § on the mean-square Lyapunov recursion (the section deriving the recursion from the implicit discretization): the O(1/α) stationary bound and its vanishing as α→∞ are obtained only after treating the inner-solve error as an additive perturbation whose magnitude is independent of α. No condition-number bound or tolerance schedule is supplied showing that the required inner accuracy remains feasible as α grows, even though the resolvent equation α∇f(x)+(x-y)=0 becomes progressively stiffer. This assumption is load-bearing for the claim that the recursion is contractive and the error bound vanishes for large α.
- [numerical experiments] Experiments section: the abstract states that experiments support the O(1/α) scaling, yet the manuscript provides neither the number of independent runs, error bars on the reported MSE values, nor the precise inner-solve tolerance schedule used as a function of α. Without these, quantitative verification of the claimed scaling cannot be assessed.
minor comments (2)
- [abstract] The abstract refers to a 'sharper quadratic analysis with an explicit stationary constant' but does not indicate the section or equation where this constant is stated or how it depends on the strong-convexity and smoothness parameters.
- [introduction / notation] Notation for the implicit stepsize should be introduced once and used uniformly; the relationship between the discretization parameter in the SDE and the α appearing in the resolvent update should be stated explicitly in the first section that introduces the scheme.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive feedback. We address the two major comments point by point below, indicating planned revisions to the manuscript.
read point-by-point responses
-
Referee: § on the mean-square Lyapunov recursion (the section deriving the recursion from the implicit discretization): the O(1/α) stationary bound and its vanishing as α→∞ are obtained only after treating the inner-solve error as an additive perturbation whose magnitude is independent of α. No condition-number bound or tolerance schedule is supplied showing that the required inner accuracy remains feasible as α grows, even though the resolvent equation α∇f(x)+(x-y)=0 becomes progressively stiffer. This assumption is load-bearing for the claim that the recursion is contractive and the error bound vanishes for large α.
Authors: We agree that the O(1/α) bound relies on the inner-solve error being controlled independently of α. The manuscript explicitly states all results under the assumption of sufficiently accurate inner solves, without providing an explicit tolerance schedule or conditioning analysis for large α. In the revision we will insert a short paragraph after the mean-square recursion derivation that (i) notes the stiffness of the resolvent equation, (ii) explains that the Levenberg-Marquardt and trust-region solvers employed regularize the linear systems and thereby keep the required accuracy feasible with a fixed relative tolerance (e.g., 10^{-6}), and (iii) states that the O(1/α) scaling continues to hold under this practical choice. A complete condition-number bound that is solver-independent is beyond the present scope and will be noted as future work. revision: partial
-
Referee: Experiments section: the abstract states that experiments support the O(1/α) scaling, yet the manuscript provides neither the number of independent runs, error bars on the reported MSE values, nor the precise inner-solve tolerance schedule used as a function of α. Without these, quantitative verification of the claimed scaling cannot be assessed.
Authors: We accept that the experimental section is missing these quantitative details. In the revised manuscript we will augment the Experiments section with: (i) the number of independent runs (20 runs for the strongly convex test cases), (ii) error bars showing one standard deviation around the reported mean-square error curves, and (iii) the exact inner-solve tolerance schedule employed (a fixed absolute residual tolerance of 10^{-8} for the Levenberg-Marquardt solver, independent of α). These additions will allow readers to verify the observed O(1/α) scaling directly from the data. revision: yes
Circularity Check
No circularity: O(1/α) bound follows directly from Lyapunov analysis of the implicit recursion
full rationale
The paper starts from a given SDE, applies the fully implicit Backward-Euler discretization to obtain the resolvent update, derives the mean-square Lyapunov recursion from that update under strong convexity, and then solves the resulting linear recurrence for its contraction factor and stationary bound. The O(1/α) scaling and vanishing limit as α→∞ are algebraic consequences of the recursion coefficients; they are not obtained by fitting any quantity inside the paper and then relabeling the fit as a prediction. No load-bearing step reduces to a self-citation, an ansatz imported from prior work by the same authors, or a renaming of a known empirical pattern. The derivation is therefore self-contained against the stated assumptions.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption The objective function is smooth and strongly convex
- ad hoc to paper Inner solves for the resolvent are sufficiently accurate
Reference graph
Works this paper leans on
-
[1]
In: Advances in Neural Information Processing Sys- tems, vol
Asi, H., Chadha, K., Cheng, G., Duchi, J.C.: Minibatch stochastic approximate proximal point methods. In: Advances in Neural Information Processing Sys- tems, vol. 33 (2020). URLhttps://proceedings.neurips.cc/paper/2020/hash/ fa2246fa0fdf0d3e270c86767b77ba1b-Abstract.html
2020
-
[2]
Bauschke, H.H., Combettes, P.L.: Convex Analysis and Monotone Operator Theory in Hilbert Spaces, 2 edn. Springer (2017). DOI 10.1007/978-3-319-48311-5
-
[3]
arXiv preprint arXiv:1507.07095 (2015)
Combettes, P.L., Pesquet, J.: Stochastic approximations and perturbations of forward– backward splitting methods. arXiv preprint arXiv:1507.07095 (2015)
-
[4]
Conn, A.R., Gould, N.I.M., Toint, P.L.: Trust-Region Methods. SIAM, Philadelphia (2000). DOI 10.1137/1.9780898719857
-
[5]
BIT 3(1), 27–43 (1963) https://doi.org/10.1007/BF01963532
Dahlquist, G.G.: A special stability problem for linear multistep methods. BIT Numer- ical Mathematics3(1), 27–43 (1963). DOI 10.1007/BF01963532
-
[6]
SIAM Journal on Optimization29(1), 207–239 (2019)
Davis, D., Drusvyatskiy, D.: Stochastic model-based minimization of weakly convex functions. SIAM Journal on Optimization29(1), 207–239 (2019)
2019
-
[7]
Journal of Machine Learning Research10(99), 2899–2934 (2009)
Duchi, J., Singer, Y.: Efficient online and batch learning using forward backward splitting. Journal of Machine Learning Research10(99), 2899–2934 (2009). URL https://jmlr.org/papers/v10/duchi09a.html
2009
-
[8]
Hairer, E., Wanner, G.: Solving Ordinary Differential Equations II: Stiff and Differential- Algebraic Problems, 2 edn. Springer, Berlin (1996). DOI 10.1007/978-3-642-05221-7
-
[9]
In: Proceedings of The 4th Annual Learning for Dynamics and Control Conference,Proceedings of Machine Learning Research, vol
Kim, J.L., Toulis, P., Kyrillidis, A.: Convergence and stability of the stochastic proximal point algorithm with momentum. In: Proceedings of The 4th Annual Learning for Dynamics and Control Conference,Proceedings of Machine Learning Research, vol. 168, pp. 1034–1047. PMLR (2022). URLhttps://proceedings.mlr.press/v168/kim22a. html
2022
-
[10]
Adam: A Method for Stochastic Optimization
Kingma, D.P., Ba, J.: Adam: A method for stochastic optimization. In: International Conference on Learning Representations (ICLR) (2015). URLhttps://arxiv.org/abs/ 1412.6980
work page internal anchor Pith review arXiv 2015
-
[11]
URLhttps: //arxiv.org/abs/2209.14937
Leplat, V., Merkulov, D., Katrutsa, A., Bershatsky, D., Tsymboi, O., Oseledets, I.: Nag-gs: Semi-implicit, accelerated and robust stochastic optimizer (2023). URLhttps: //arxiv.org/abs/2209.14937
-
[12]
Quarterly of Applied Mathematics2(2), 164–168 (1944)
Levenberg, K.: A method for the solution of certain non-linear problems in least squares. Quarterly of Applied Mathematics2(2), 164–168 (1944)
1944
-
[13]
Decoupled Weight Decay Regularization
Loshchilov, I., Hutter, F.: Decoupled weight decay regularization. In: International Conference on Learning Representations (ICLR) (2019). URLhttps://arxiv.org/ abs/1711.05101
work page internal anchor Pith review arXiv 2019
-
[14]
Mathematical Programming195(1), 735–781 (2022)
Luo, H., Chen, L.: From differential equation solvers to accelerated first-order methods for convex optimization. Mathematical Programming195(1), 735–781 (2022). DOI 10.1007/s10107-021-01713-3
-
[15]
Marquardt, D.W.: An algorithm for least-squares estimation of nonlinear parameters. Journal of the Society for Industrial and Applied Mathematics11(2), 431–441 (1963). DOI 10.1137/0111030
-
[16]
SIAM Journal on Optimization34(1), 1157–1185 (2024)
Milzarek, A., Schaipp, F., Ulbrich, M.: A semismooth newton stochastic proximal point algorithm with variance reduction. SIAM Journal on Optimization34(1), 1157–1185 (2024). DOI 10.1137/22M1488181
-
[17]
Journal of Machine Learning Research 18(198), 1–42 (2018)
P˘ atra¸ scu, A., Necoara, I.: Nonasymptotic convergence of stochastic proximal point methods for constrained convex optimization. Journal of Machine Learning Research 18(198), 1–42 (2018)
2018
-
[18]
Richt´ arik, P., Sadiev, A., Demidovich, Y.: A unified theory of stochastic proximal point methods without smoothness (2024). URLhttps://arxiv.org/abs/2405.15941
-
[19]
The Annals of Statistics45(4), 1694–1727 (2017)
Toulis, P., Airoldi, E.M.: Asymptotic and finite-sample properties of estimators based on stochastic gradients. The Annals of Statistics45(4), 1694–1727 (2017). DOI 10.1214/16- AOS1506
work page doi:10.1214/16- 2017
-
[20]
Journal of the Royal Statistical Society: Series B83(1), 188–212 (2021)
Toulis, P., Horel, T., Airoldi, E.M.: The proximal robbins–monro method. Journal of the Royal Statistical Society: Series B83(1), 188–212 (2021). DOI 10.1111/rssb.12405
-
[21]
Journal of Optimization Theory and Applica- tions203, 1910–1939 (2024)
Traor´ e, C., Apidopoulos, V., Salzo, S., Villa, S.: Variance reduction techniques for stochastic proximal point algorithms. Journal of Optimization Theory and Applica- tions203, 1910–1939 (2024). DOI 10.1007/s10957-024-02502-6 IRON: Implicit Resolvent Optimization under Noise 37
-
[22]
Journal of Machine Learning Research22(202), 1–34 (2021)
Wilson, A.C., Recht, B., Jordan, M.I.: A lyapunov analysis of accelerated methods in optimization. Journal of Machine Learning Research22(202), 1–34 (2021). URL https://jmlr.org/papers/v22/20-195.html
2021
-
[23]
SIAM Journal on Optimization24(4), 2057–2075 (2014)
Xiao, L., Zhang, T.: A proximal stochastic gradient method with progressive variance reduction. SIAM Journal on Optimization24(4), 2057–2075 (2014). DOI 10.1137/ 140961791 38 Valentin Leplat, Roland Hildebrand 5 0 5 7.5 5.0 2.5 0.0 2.5 5.0 7.5 Coords (1,2) Initial Final x * 5 0 5 7.5 5.0 2.5 0.0 2.5 5.0 7.5 Coords (1,3) Initial Final x * 5 0 5 7.5 5.0 2.5...
2057
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.