Recognition: 3 theorem links
· Lean TheoremSensingAgents: A Multi-Agent Collaborative Framework for Robust IMU Activity Recognition
Pith reviewed 2026-05-08 17:53 UTC · model grok-4.3
The pith
Multi-agent LLM framework reaches 79.5% zero-shot accuracy on IMU activity recognition by debating sensor conflicts
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SensingAgents organizes LLM-powered agents into specialized roles: a group of Analyst Agents for position-specific sensor analysis (arm, wrist, belt, pocket), a pair of Advocate Agents that resolves sensor conflicts through dynamic and static dialectical debates, and a Decision Agent that ensures reliability under sensor drift or failure. Evaluation on the Shoaib dataset demonstrates that SensingAgents significantly outperforms state-of-the-art single-agent and multi-agent LLM models, achieving an accuracy of 79.5% in a zero setting--29% higher than existing agent models and 9.4% higher than deep learning baselines--particularly in complex scenarios where multi-sensor data is conflicting or
What carries the argument
The SensingAgents multi-agent collaborative framework with Analyst Agents for position-specific IMU analysis, Advocate Agents using dialectical debate for conflict resolution, and a Decision Agent for final reliability checks.
If this is right
- Achieves 79.5% accuracy in zero-shot settings on the Shoaib dataset.
- Outperforms single-agent and multi-agent LLM models by 29% and deep learning baselines by 9.4%.
- Handles conflicting or noisy multi-sensor data more effectively than prior single-model approaches.
- Supplies transparent reasoning steps for activity predictions through agent debates.
Where Pith is reading between the lines
- The debate mechanism for resolving sensor disagreements could be tested on other multi-modal fusion tasks beyond IMU data.
- Logging the agents' analysis and debate steps might enable user-facing explanations in mobile health applications.
Load-bearing premise
That LLM agents prompted with specialized roles can perform accurate position-specific sensor analysis and resolve conflicts through dialectical debate without hallucinations, bias, or need for fine-tuning or external verification.
What would settle it
A controlled test on the Shoaib dataset with artificially added noise to one sensor position where SensingAgents accuracy falls below deep learning baselines would falsify the claim of superior robustness.
Figures






read the original abstract
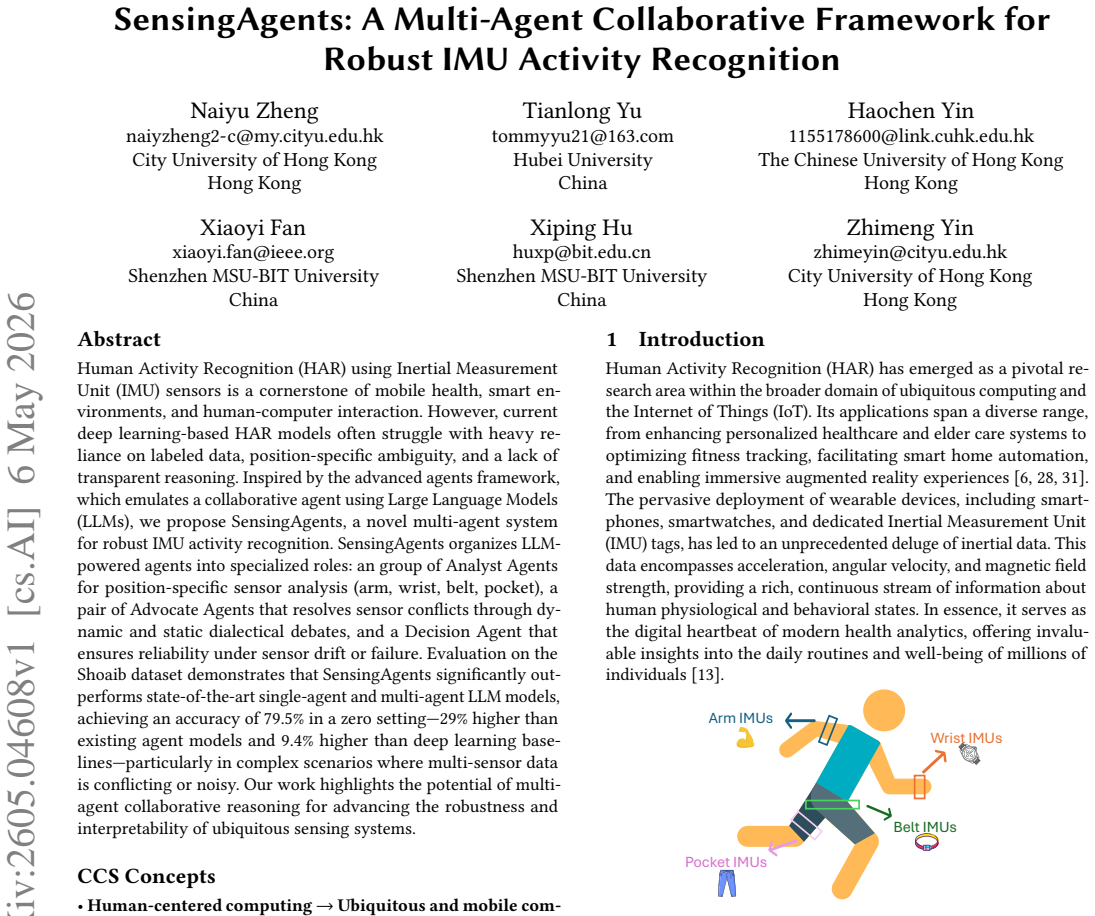
Human Activity Recognition (HAR) using Inertial Measurement Unit (IMU) sensors is a cornerstone of mobile health, smart environments, and human-computer interaction. However, current deep learning-based HAR models often struggle with heavy reliance on labeled data, position-specific ambiguity, and a lack of transparent reasoning. Inspired by the advanced agents framework, which emulates a collaborative agent using Large Language Models (LLMs), we propose SensingAgents, a novel multi-agent system for robust IMU activity recognition. SensingAgents organizes LLM-powered agents into specialized roles: a group of Analyst Agents for position-specific sensor analysis (arm, wrist, belt, pocket), a pair of Advocate Agents that resolves sensor conflicts through dynamic and static dialectical debates, and a Decision Agent that ensures reliability under sensor drift or failure. Evaluation on the Shoaib dataset demonstrates that SensingAgents significantly outperforms state-of-the-art single-agent and multi-agent LLM models, achieving an accuracy of 79.5% in a zero setting--29% higher than existing agent models and 9.4% higher than deep learning baselines--particularly in complex scenarios where multi-sensor data is conflicting or noisy. Our work highlights the potential of multi-agent collaborative reasoning for advancing the robustness and interpretability of ubiquitous sensing systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes SensingAgents, a multi-agent LLM framework for IMU-based human activity recognition. Analyst Agents perform position-specific analysis on sensors at arm, wrist, belt, and pocket locations; Advocate Agents resolve conflicts via dynamic and static dialectical debates; and a Decision Agent ensures reliability under drift or failure. On the Shoaib dataset in a zero-shot setting, the system reports 79.5% accuracy, outperforming other agent models by 29% and deep learning baselines by 9.4%, with emphasis on robustness to conflicting or noisy multi-sensor inputs.
Significance. If the results hold under rigorous verification, the work offers a label-efficient, interpretable alternative to supervised deep learning for HAR by leveraging collaborative LLM reasoning for sensor fusion and conflict resolution. The role specialization and debate mechanism represent a novel application of multi-agent systems to ubiquitous sensing, potentially improving robustness in real-world conditions with sensor ambiguity or failure. The empirical gains, if reproducible, could motivate further exploration of agent-based approaches in mobile health and HCI.
major comments (3)
- [Abstract/Evaluation] Abstract and Evaluation section: The central claim of 79.5% zero-shot accuracy (with 29% and 9.4% gains) is presented without any description of IMU signal preprocessing, conversion of time-series data into LLM prompts, dataset splits, number of activities/classes, evaluation runs, or statistical significance tests. This absence makes it impossible to verify whether the reported outperformance reflects genuine robustness or artifacts of the experimental protocol.
- [Agent Architecture] Advocate Agents and Decision Agent descriptions: The assumption that dialectical debate between Advocate Agents can reliably resolve position-specific conflicts and noise without introducing hallucinations or ungrounded reasoning is load-bearing for the robustness claim, yet no verification mechanism, grounding step, or error analysis for debate outputs is provided. LLMs lack native signal-processing capabilities, so the absence of external checks or ablation on hallucination rates undermines the assertion that the multi-agent setup outperforms baselines in complex scenarios.
- [Evaluation] Comparison to deep learning baselines: The 9.4% improvement over DL baselines in a zero-shot setting requires explicit clarification of whether the DL models were trained on the Shoaib dataset or also evaluated zero-shot; without this, the cross-paradigm comparison cannot be interpreted as evidence of superior robustness.
minor comments (2)
- Clarify the exact meaning of 'zero setting' (presumably zero-shot) and provide the full list of activity classes and sensor positions used in the Shoaib evaluation.
- Include a diagram or pseudocode illustrating the information flow between Analyst, Advocate, and Decision Agents to aid reader comprehension of the collaborative process.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important areas for improving clarity, reproducibility, and rigor in our presentation of SensingAgents. We address each major comment below with clarifications and have revised the manuscript to incorporate additional details and analyses where needed.
read point-by-point responses
-
Referee: [Abstract/Evaluation] Abstract and Evaluation section: The central claim of 79.5% zero-shot accuracy (with 29% and 9.4% gains) is presented without any description of IMU signal preprocessing, conversion of time-series data into LLM prompts, dataset splits, number of activities/classes, evaluation runs, or statistical significance tests. This absence makes it impossible to verify whether the reported outperformance reflects genuine robustness or artifacts of the experimental protocol.
Authors: We agree that the original manuscript omitted key experimental details necessary for verification. In the revised version, we have added a new 'Experimental Protocol' subsection in the Evaluation section. This describes IMU preprocessing (band-pass filtering at 0.5-20 Hz, z-score normalization, and segmentation into 2-second windows with 50% overlap), the prompt engineering approach (extracting statistical and frequency features from each position-specific sensor stream and converting them into structured textual summaries for the LLM), the Shoaib dataset (6 activity classes, 4 body positions, zero-shot protocol with no labeled training data or fine-tuning), 5 independent runs with different random seeds for prompt sampling, and statistical significance via paired t-tests on accuracy differences. These additions enable full assessment of the reported results. revision: yes
-
Referee: [Agent Architecture] Advocate Agents and Decision Agent descriptions: The assumption that dialectical debate between Advocate Agents can reliably resolve position-specific conflicts and noise without introducing hallucinations or ungrounded reasoning is load-bearing for the robustness claim, yet no verification mechanism, grounding step, or error analysis for debate outputs is provided. LLMs lack native signal-processing capabilities, so the absence of external checks or ablation on hallucination rates undermines the assertion that the multi-agent setup outperforms baselines in complex scenarios.
Authors: This concern about potential hallucinations in the debate process is well-taken, as LLMs operate on textual representations rather than raw signals. The original design grounds the process by having Analyst Agents produce feature-based summaries directly from the IMU data, with the Decision Agent performing a final cross-check against all position inputs for consistency. To address the request for verification, the revised manuscript adds an error analysis subsection that samples debate outputs and compares them against the underlying analyst summaries and raw feature values to quantify unsupported claims. We also include an ablation study removing the debate mechanism to measure its impact on robustness in noisy cases. These additions provide the requested checks while acknowledging the inherent limitations of LLM reasoning. revision: yes
-
Referee: [Evaluation] Comparison to deep learning baselines: The 9.4% improvement over DL baselines in a zero-shot setting requires explicit clarification of whether the DL models were trained on the Shoaib dataset or also evaluated zero-shot; without this, the cross-paradigm comparison cannot be interpreted as evidence of superior robustness.
Authors: We appreciate the opportunity to clarify this point. The deep learning baselines (standard CNN, LSTM, and Transformer models from the HAR literature) were trained in a fully supervised manner on labeled portions of the Shoaib dataset using conventional train-test splits. SensingAgents, by contrast, performs zero-shot inference with no access to any training labels or fine-tuning. The reported 9.4% gain therefore illustrates the label efficiency and robustness of the multi-agent approach relative to supervised DL methods, rather than a matched zero-shot comparison between paradigms. We have updated the Evaluation section to state this distinction explicitly and added discussion on the practical advantages for settings where labeled IMU data is scarce or unavailable. revision: yes
Circularity Check
No circularity: purely empirical multi-agent framework evaluated on external dataset
full rationale
The paper introduces SensingAgents as a multi-agent LLM system with Analyst, Advocate, and Decision agents for IMU-based activity recognition. Its central claim rests on an empirical evaluation reporting 79.5% accuracy on the Shoaib dataset, outperforming baselines. No equations, derivations, fitted parameters, or predictions appear in the provided text. No self-citations are invoked as load-bearing premises for any result. The work is self-contained against an external benchmark dataset, with no reduction of outputs to inputs by construction. This matches the default non-circular case for empirical system papers.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption LLMs can perform reliable position-specific sensor analysis and dialectical conflict resolution when assigned specialized roles via prompting
invented entities (3)
-
Analyst Agents (arm, wrist, belt, pocket)
no independent evidence
-
Advocate Agents
no independent evidence
-
Decision Agent
no independent evidence
Lean theorems connected to this paper
-
IndisputableMonolith.Cost (J = ½(x+x⁻¹)−1) — no parallel; tools are standard DSP, not ratio-symmetric costwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
FFT Analysis... top-3 dominant frequencies... Step Detection... Autocorrelation Periodicity... Vertical Asymmetry Analysis (skewness γ_y, peak-valley ratio ρ_pv).
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Yasmin Abdelaal, Michaël Aupetit, Abdelkader Baggag, and Dena Al-Thani. 2024. Exploring the applications of explainability in wearable data analytics: Systematic literature review.Journal of Medical Internet Research26 (2024), e53863
2024
- [2]
-
[3]
Tuo An, Yunjiao Zhou, Han Zou, and Jianfei Yang. 2026. IoT-LLM: A framework for enhancing large language model reasoning from real-world sensor data. Patterns7, 1 (2026)
2026
-
[4]
Anthropic. 2026. Claude Code. https://github.com/anthropics/claude-code
2026
-
[5]
Sheikh Asif Imran Shouborno, Mohammad Nur Hossain Khan, Subrata Biswas, and Bashima Islam. 2025. LLaSA: A Sensor-Aware LLM for Natural Language Reasoning of Human Activity from IMU Data. InCompanion of the 2025 ACM International Joint Conference on Pervasive and Ubiquitous Computing. 893–899
2025
-
[6]
Cho-Chun Chiu, Tuan Nguyen, Ting He, Shiqiang Wang, Beom-Su Kim, and Ki Il Kim. 2024. Active learning for wban-based health monitoring. InProceedings of the Twenty-fifth International Symposium on Theory, Algorithmic Foundations, and Protocol Design for Mobile Networks and Mobile Computing. 231–240
2024
-
[7]
Ilker Demirel, Karan Thakkar, Benjamin Elizalde, Miquel Espi Marques, Aditya Sarathy, Yang Bai, Umamahesh Srinivas, Jiajie Xu, Shirley Ren, and Jaya Narain
-
[8]
arXiv preprint arXiv:2509.10729(2025)
Using LLMs for Late Multimodal Sensor Fusion for Activity Recognition. arXiv preprint arXiv:2509.10729(2025)
-
[9]
Emilio Ferrara. 2024. Large language models for wearable sensor-based human activity recognition, health monitoring, and behavioral modeling: a survey of early trends, datasets, and challenges.Sensors24, 15 (2024), 5045
2024
-
[10]
Hearst, Susan T Dumais, Edgar Osuna, John Platt, and Bernhard Scholkopf
Marti A. Hearst, Susan T Dumais, Edgar Osuna, John Platt, and Bernhard Scholkopf. 1998. Support vector machines.IEEE Intelligent Systems and their applications13, 4 (1998), 18–28
1998
-
[11]
Zhiqing Hong, Yiwei Song, Zelong Li, Anlan Yu, Shuxin Zhong, Yi Ding, Tian He, and Desheng Zhang. 2025. LLM4HAR: Generalizable On-device Human Activity Recognition with Pretrained LLMs. InProceedings of the 31st ACM SIGKDD Conference on Knowledge Discovery and Data Mining. 4511–4521
2025
-
[12]
Jeya Vikranth Jeyakumar, Ankur Sarker, Luis Antonio Garcia, and Mani Sri- vastava. 2023. X-char: A concept-based explainable complex human activity recognition model.Proceedings of the ACM on interactive, mobile, wearable and ubiquitous technologies7, 1 (2023), 1–28
2023
-
[13]
Sijie Ji, Xinzhe Zheng, and Chenshu Wu. 2024. Hargpt: Are llms zero-shot human activity recognizers?. In2024 IEEE International Workshop on Foundation Models for Cyber-Physical Systems & Internet of Things (FMSys). IEEE, 38–43
2024
-
[14]
Minwoo Kim, Jaechan Cho, Seongjoo Lee, and Yunho Jung. 2019. IMU sensor- based hand gesture recognition for human-machine interfaces.Sensors19, 18 (2019), 3827
2019
-
[15]
Ha Le, Akshat Choube, Vedant Das Swain, Varun Mishra, and Stephen Intille. 2025. A Multi-Agent LLM Network for Suggesting and Correcting Human Activity and Posture Annotations. InCompanion of the 2025 ACM International Joint Conference on Pervasive and Ubiquitous Computing. 877–884
2025
-
[16]
Zechen Li, Baiyu Chen, Hao Xue, and Flora D Salim. 2025. Zara: Zero-shot motion time-series analysis via knowledge and retrieval driven llm agents.arXiv preprint arXiv:2508.04038(2025)
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[17]
Zechen Li, Shohreh Deldari, Linyao Chen, Hao Xue, and Flora D Salim. 2025. Sensorllm: Aligning large language models with motion sensors for human activity recognition. InProceedings of the 2025 Conference on Empirical Methods in Natural Language Processing. 354–379
2025
-
[18]
Andrea Mannini and Angelo Maria Sabatini. 2010. Machine learning methods for classifying human physical activity from on-body accelerometers.Sensors10, 2 (2010), 1154–1175
2010
-
[19]
OpenClaw. 2025. OpenClaw. https://openclaw.ai/
2025
-
[20]
Francisco Javier Ordóñez and Daniel Roggen. 2016. Deep convolutional and lstm recurrent neural networks for multimodal wearable activity recognition.Sensors 16, 1 (2016), 115
2016
-
[21]
Muhammad Shoaib, Stephan Bosch, Ozlem Durmaz Incel, Hans Scholten, and Paul JM Havinga. 2014. Fusion of smartphone motion sensors for physical activity recognition.Sensors14, 6 (2014), 10146–10176
2014
-
[22]
Qin Tang, Jing Liang, and Fangqi Zhu. 2023. A comparative review on multi-modal sensors fusion based on deep learning.Signal Processing213 (2023), 109165
2023
-
[23]
Jason Wei, Xuezhi Wang, Dale Schuurmans, Maarten Bosma, Fei Xia, Ed Chi, Quoc V Le, Denny Zhou, et al. 2022. Chain-of-thought prompting elicits reasoning in large language models.Advances in neural information processing systems35 (2022), 24824–24837
2022
-
[24]
Huatao Xu, Liying Han, Qirui Yang, Mo Li, and Mani Srivastava. 2024. Penetra- tive ai: Making llms comprehend the physical world. InProceedings of the 25th International Workshop on Mobile Computing Systems and Applications. 1–7
2024
-
[25]
Huatao Xu, Pengfei Zhou, Rui Tan, Mo Li, and Guobin Shen. 2021. Limu-bert: Unleashing the potential of unlabeled data for imu sensing applications. In Proceedings of the 19th ACM Conference on Embedded Networked Sensor Systems. 220–233
2021
-
[26]
Hua Yan, Heng Tan, Yi Ding, Pengfei Zhou, Vinod Namboodiri, and Yu Yang. 2025. Large Language Model-guided Semantic Alignment for Human Activity Recog- nition.Proceedings of the ACM on Interactive, Mobile, Wearable and Ubiquitous Technologies9, 4 (2025), 1–25
2025
-
[27]
Yifan Yan, Shuai Yang, Xiuzhen Guo, Xiangguang Wang, Wei Chow, Yuanchao Shu, and Shibo He. 2025. mmExpert: Integrating Large Language Models for Comprehensive mmWave Data Synthesis and Understanding. InProceedings of the Twenty-sixth International Symposium on Theory, Algorithmic Foundations, and Protocol Design for Mobile Networks and Mobile Computing. 1...
2025
- [28]
-
[29]
Fusang Zhang, Jie Xiong, Zhaoxin Chang, Junqi Ma, and Daqing Zhang. 2022. Mobi2Sense: empowering wireless sensing with mobility. InProceedings of the 28th Annual International Conference on Mobile Computing And Networking. 268– 281
2022
-
[30]
Yilin Zhao, Yihong Chen, Rui Tang, and Wenjie Zhao. 2025. MultiagentsCR: A Multi-Agent Collaborative Reasoning Framework Based on LLM for Human Activity Recognition. In2025 10th International Conference on Information Science, Computer Technology and Transportation (ISCTT). IEEE, 90–95
2025
-
[31]
Huiyu Zhou and Huosheng Hu. 2007. Inertial sensors for motion detection of human upper limbs.Sensor Review27, 2 (2007), 151–158
2007
-
[32]
Yang, and Qun Jin
Xiaokang Zhou, Wei Liang, Kevin I-Kai Wang, Hao Wang, Laurence T. Yang, and Qun Jin. 2020. Deep-Learning-Enhanced Human Activity Recognition for Internet of Healthcare Things.IEEE Internet of Things Journal7, 7 (2020), 6429–
2020
-
[33]
doi:10.1109/JIOT.2020.2985082
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.