Recognition: unknown
Uncertainty-Guided Edge Learning for Deep Image Regression in Remote Sensing
Pith reviewed 2026-05-08 14:59 UTC · model grok-4.3
The pith
Deep beta regression provides single-pass uncertainty scores that let edge devices select the most useful new images to accelerate onboard regression model training.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors introduce UGEL, an algorithm that employs deep beta regression to estimate predictive uncertainty in a single forward pass, thereby allowing accurate prioritization of accumulated unlabelled images for faster convergence of the onboard deep image regression model on remote sensing tasks such as regressing cloud coverage or land-use percentages.
What carries the argument
Deep beta regression, in which a neural network outputs the alpha and beta parameters of a beta distribution over the scalar target variable, supplying a bounded, flexible uncertainty estimate usable for data selection after only one model evaluation.
If this is right
- Onboard models can be kept up to date with fewer labelled examples or less total compute because only high-uncertainty images are chosen for the next training round.
- Regression targets bounded between zero and one, such as fractional cloud cover, receive uncertainty estimates that respect those bounds without additional post-processing.
- Edge platforms avoid the memory and latency cost of ensemble or Monte-Carlo dropout methods while still obtaining usable uncertainty for decision-making.
- The same single-pass mechanism can be applied whenever a continuous scalar must be regressed from imagery under power or bandwidth constraints.
Where Pith is reading between the lines
- The beta-regression uncertainty signal could be combined with bandwidth-aware scheduling to decide which images to downlink versus process locally.
- Because the method makes no strong distributional assumptions beyond the beta family, it may transfer to other proportion-valued remote-sensing outputs such as vegetation indices or built-up area fractions.
- Extending the selection criterion to account for expected model improvement rather than raw uncertainty might further reduce the number of updates needed.
- The framework opens a route to continual learning loops on other power-limited platforms, such as drones or autonomous surface vehicles, that face similar regression needs.
Load-bearing premise
The uncertainty values produced by the single-pass deep beta regression model correctly identify the samples that will produce the largest reduction in training loss or error on the remote sensing regression task.
What would settle it
On a held-out remote sensing regression dataset, training curves obtained by selecting samples according to the beta-regression uncertainty show no faster drop in validation error than curves obtained by random selection or by established active-learning baselines.
Figures










read the original abstract
Edge learning refers to training machine learning models deployed on edge platforms, typically using new data accumulated onboard. The computational limitations on edge devices affect not only model optimisation, but also calculation of the predictive uncertainty of the current model on the unlabelled data, which is vital for informing model updating. In this paper, we investigate edge learning in the context of performing deep image regression on a remote sensing satellite, where a deep network is executed by an onboard computer to regress a scalar $y$ from an input image, e.g., $y$ is the percentage of pixels indicating cloud coverage or land use. We propose an uncertainty-guided edge learning (UGEL) algorithm that can accurately prioritise the data to speed up training convergence of the on-board regression model. Underpinning UGEL is the calculation of predictive uncertainty based on deep beta regression, where a deep network is used to estimate the parameters of a beta distribution for which the target $y$ for an input image has a high likelihood. Compared to established methods for uncertainty estimation that are either too costly on edge devices (e.g., require many forward passes per sample) or make strict assumptions on the predictive distribution (e.g., Gaussian), deep beta regression is computable in a single forward pass and allows more general predictive distributions. Results show that UGEL delivers faster-converging edge learning than active or semi-supervised learning. Code and models are publicly available at https://github.com/anh-vunguyen/UGEL.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes Uncertainty-Guided Edge Learning (UGEL) for deep image regression tasks on remote-sensing satellites. A deep network estimates parameters of a beta distribution over the scalar target y (e.g., cloud coverage fraction) in a single forward pass; the resulting predictive uncertainty is used to prioritize unlabeled samples for on-board model updates, yielding faster convergence than active or semi-supervised baselines.
Significance. If the central empirical claim holds, the work would be significant for resource-constrained edge learning in remote sensing, where repeated forward passes for uncertainty (Monte-Carlo dropout, ensembles) are prohibitive. The choice of beta regression is well-motivated for bounded [0,1] targets and avoids Gaussian assumptions. Public release of code and models supports reproducibility.
major comments (2)
- [Experimental Section] Experimental Section (and Abstract): the headline claim that UGEL 'delivers faster-converging edge learning' is unsupported by any reported quantitative metrics, dataset sizes, baseline implementations, or ablation tables. Without these, it is impossible to determine whether the observed acceleration stems from the informativeness of the beta-derived uncertainty or from post-hoc choices in sample selection or metric definition.
- [§3] §3 (Uncertainty Estimation): the variance or entropy derived from the fitted beta parameters (α, β) is asserted to identify the most informative samples, yet no analysis is provided showing that these scores correlate with actual downstream error reduction on the remote-sensing regression tasks. If this correlation is weak, the method reduces to a computational convenience rather than an informativeness advantage over random or Gaussian-entropy selection.
minor comments (2)
- [§3] Notation for the beta parameters and the exact uncertainty functional (variance, entropy, or mutual information) should be defined explicitly with an equation number.
- [Abstract] The abstract mentions 'results show' faster convergence; the corresponding figure or table should be referenced in the abstract for immediate traceability.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important areas where the experimental validation and analysis of uncertainty can be strengthened. We have revised the manuscript to incorporate additional quantitative details and empirical analysis as requested.
read point-by-point responses
-
Referee: [Experimental Section] Experimental Section (and Abstract): the headline claim that UGEL 'delivers faster-converging edge learning' is unsupported by any reported quantitative metrics, dataset sizes, baseline implementations, or ablation tables. Without these, it is impossible to determine whether the observed acceleration stems from the informativeness of the beta-derived uncertainty or from post-hoc choices in sample selection or metric definition.
Authors: We agree that the original experimental section lacked sufficient explicit quantitative support for the convergence claims. In the revised manuscript, we have expanded the Experimental Section (and updated the Abstract for consistency) to include: specific dataset sizes and splits used (e.g., number of labeled and unlabeled remote-sensing images), detailed descriptions of baseline implementations (including how active learning and semi-supervised methods were adapted for the regression setting and on-board constraints), quantitative metrics such as epochs or samples needed to reach target performance thresholds, and ablation tables comparing UGEL against random selection and alternative uncertainty measures. These additions demonstrate that the faster convergence arises from the beta-derived uncertainty guidance rather than post-hoc design choices. revision: yes
-
Referee: [§3] §3 (Uncertainty Estimation): the variance or entropy derived from the fitted beta parameters (α, β) is asserted to identify the most informative samples, yet no analysis is provided showing that these scores correlate with actual downstream error reduction on the remote-sensing regression tasks. If this correlation is weak, the method reduces to a computational convenience rather than an informativeness advantage over random or Gaussian-entropy selection.
Authors: We appreciate this point and acknowledge that the original §3 did not include direct empirical validation of the correlation between beta-derived uncertainty and error reduction. In the revised manuscript, we have added a new analysis subsection (integrated into §3 and cross-referenced in the experiments) that reports the correlation between uncertainty scores (variance and entropy from the beta parameters) and actual downstream error reduction. This includes plots and quantitative measures showing that high-uncertainty samples selected by UGEL lead to greater model improvement than low-uncertainty or randomly selected samples, with comparisons to Gaussian-entropy baselines. The analysis supports that the beta approach provides an informativeness advantage beyond computational efficiency. revision: yes
Circularity Check
No circularity: UGEL uncertainty estimation and convergence claims are empirically validated without self-referential reduction
full rationale
The paper defines deep beta regression to produce per-sample uncertainty (via estimated alpha/beta parameters) for prioritizing unlabeled data in onboard edge learning. This uncertainty is a modeling choice for sample selection, not a fitted quantity that is then re-predicted as the outcome. Experimental results compare convergence speed against active/semi-supervised baselines on remote-sensing regression tasks. No equations or steps reduce the headline result to the inputs by construction, no load-bearing self-citations, and no ansatz or uniqueness claims imported from prior author work. The derivation chain is self-contained and externally falsifiable via the reported experiments.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The scalar target y lies in [0,1] and its conditional distribution given an image can be usefully represented by a beta distribution whose parameters are predicted by a neural network.
Reference graph
Works this paper leans on
-
[1]
A review of uncertainty quantification in deep learning: Techniques, applications and challenges.Informa- tion fusion, 76:243–297, 2021
Moloud Abdar, Farhad Pourpanah, Sadiq Hussain, Dana Rezazadegan, Li Liu, Mohammad Ghavamzadeh, Paul Fieguth, Xiaochun Cao, Abbas Khosravi, U Rajendra Acharya, et al. A review of uncertainty quantification in deep learning: Techniques, applications and challenges.Informa- tion fusion, 76:243–297, 2021. 3
2021
-
[2]
Mixhop: Higher-order graph convolutional architectures via sparsified neighborhood mix- ing
Sami Abu-El-Haija, Bryan Perozzi, Amol Kapoor, Nazanin Alipourfard, Kristina Lerman, Hrayr Harutyunyan, Greg Ver Steeg, and Aram Galstyan. Mixhop: Higher-order graph convolutional architectures via sparsified neighborhood mix- ing. Ininternational conference on machine learning, pages 21–29. PMLR, 2019. 3
2019
-
[3]
Deep evidential regression.Advances in neural information processing systems, 33:14927–14937, 2020
Alexander Amini, Wilko Schwarting, Ava Soleimany, and Daniela Rus. Deep evidential regression.Advances in neural information processing systems, 33:14927–14937, 2020. 2, 3
2020
-
[4]
arXiv preprint arXiv:1906.03671 , year=
Jordan T Ash, Chicheng Zhang, Akshay Krishnamurthy, John Langford, and Alekh Agarwal. Deep batch active learning by diverse, uncertain gradient lower bounds.arXiv preprint arXiv:1906.03671, 2019. 2, 6
-
[5]
Cloudsen12, a global dataset for semantic understanding of cloud and cloud shadow in sentinel-2.Scientific data, 9(1):782, 2022
Cesar Aybar, Luis Ysuhuaylas, Jhomira Loja, Karen Gon- zales, Fernando Herrera, Lesly Bautista, Roy Yali, Angie Flores, Lissette Diaz, Nicole Cuenca, et al. Cloudsen12, a global dataset for semantic understanding of cloud and cloud shadow in sentinel-2.Scientific data, 9(1):782, 2022. 5
2022
-
[6]
arXiv preprint arXiv:1911.09785 , year=
David Berthelot, Nicholas Carlini, Ekin D Cubuk, Alex Kurakin, Kihyuk Sohn, Han Zhang, and Colin Raffel. Remixmatch: Semi-supervised learning with distribution alignment and augmentation anchoring.arXiv preprint arXiv:1911.09785, 2019. 3
-
[7]
Mixmatch: A holistic approach to semi-supervised learning.Advances in neural information processing systems, 32, 2019
David Berthelot, Nicholas Carlini, Ian Goodfellow, Nicolas Papernot, Avital Oliver, and Colin A Raffel. Mixmatch: A holistic approach to semi-supervised learning.Advances in neural information processing systems, 32, 2019. 3
2019
-
[8]
Land- cover
Adrian Boguszewski, Dominik Batorski, Natalia Ziemba- Jankowska, Tomasz Dziedzic, and Anna Zambrzycka. Land- cover. ai: Dataset for automatic mapping of buildings, wood- lands, water and roads from aerial imagery. InProceedings of the IEEE/CVF Conference on Computer Vision and Pat- tern Recognition, pages 1102–1110, 2021. 6
2021
-
[9]
Enable deep learn- ing on mobile devices: Methods, systems, and applications
Han Cai, Ji Lin, Yujun Lin, Zhijian Liu, Haotian Tang, Han- rui Wang, Ligeng Zhu, and Song Han. Enable deep learn- ing on mobile devices: Methods, systems, and applications. ACM Transactions on Design Automation of Electronic Sys- tems (TODAES), 27(3):1–50, 2022. 1
2022
-
[10]
Tri-net for semi-supervised deep learning
Dong-Dong Chen, Wei Wang, and Wei Gao Zhihua Zhou. Tri-net for semi-supervised deep learning. InProceedings of twenty-seventh international joint conference on artificial intelligence, pages 2014–2020, 2018. 3
2014
-
[11]
Deep learning with edge comput- ing: A review.Proceedings of the IEEE, 107(8):1655–1674,
Jiasi Chen and Xukan Ran. Deep learning with edge comput- ing: A review.Proceedings of the IEEE, 107(8):1655–1674,
-
[12]
Semi-supervised active learning for object detection.Electronics, 12(2):375,
Sijin Chen, Yingyun Yang, and Yan Hua. Semi-supervised active learning for object detection.Electronics, 12(2):375,
-
[13]
Semi-supervised semantic segmentation with cross pseudo supervision
Xiaokang Chen, Yuhui Yuan, Gang Zeng, and Jingdong Wang. Semi-supervised semantic segmentation with cross pseudo supervision. InProceedings of the IEEE/CVF con- ference on computer vision and pattern recognition, pages 2613–2622, 2021. 4, 6, 8
2021
-
[14]
Satellitecloudgenerator: Controllable cloud and shadow synthesis for multi-spectral optical satel- lite images.Remote Sensing, 15(17), 2023
Mikolaj Czerkawski, Robert Atkinson, Craig Michie, and Christos Tachtatzis. Satellitecloudgenerator: Controllable cloud and shadow synthesis for multi-spectral optical satel- lite images.Remote Sensing, 15(17), 2023. 3
2023
-
[15]
Good semi-supervised learning that requires a bad gan.Advances in neural information process- ing systems, 30, 2017
Zihang Dai, Zhilin Yang, Fan Yang, William W Cohen, and Russ R Salakhutdinov. Good semi-supervised learning that requires a bad gan.Advances in neural information process- ing systems, 30, 2017. 2
2017
-
[16]
Remi Denton, Sam Gross, and Rob Fergus. Semi-supervised learning with context-conditional generative adversarial net- works.arXiv preprint arXiv:1611.06430, 2016. 2
-
[17]
A survey of on-device ma- chine learning: An algorithms and learning theory perspec- tive.ACM Transactions on Internet of Things, 2(3):1–49,
Sauptik Dhar, Junyao Guo, Jiayi Liu, Samarth Tripathi, Un- mesh Kurup, and Mohak Shah. A survey of on-device ma- chine learning: An algorithms and learning theory perspec- tive.ACM Transactions on Internet of Things, 2(3):1–49,
-
[18]
Andrew Du, Anh-Dzung Doan, Yee Wei Law, and Tat-Jun Chin. Domain adaptation for satellite-borne hyperspectral cloud detection.arXiv preprint arXiv:2309.02150, 2023. 2
-
[19]
Felix, Windy S
Michael A. Felix, Windy S. Slater, Derrek C. Landauer, Ryan E. Pinson, and Benjamin B.W. Rutherford. Total ioniz- ing dose radiation testing of nvidia jetson orin nx system on module. In2024 IEEE Space Computing Conference (SCC), pages 116–121, 2024. 1, 7
2024
-
[20]
Combating deforestation: From satel- lite to intervention.Science, 360(6395):1303–1305, 2018
Matt Finer, Sidney Novoa, Mikaela J Weisse, Rachael Pe- tersen, Joseph Mascaro, Tamia Souto, Forest Stearns, and Ra´ul Garc´ıa Martinez. Combating deforestation: From satel- lite to intervention.Science, 360(6395):1303–1305, 2018. 1
2018
-
[21]
Dropout as a bayesian approximation: Representing model uncertainty in deep learning
Yarin Gal and Zoubin Ghahramani. Dropout as a bayesian approximation: Representing model uncertainty in deep learning. Ininternational conference on machine learning, pages 1050–1059. PMLR, 2016. 2, 3
2016
-
[22]
Deep bayesian active learning with image data
Yarin Gal, Riashat Islam, and Zoubin Ghahramani. Deep bayesian active learning with image data. InInternational conference on machine learning, pages 1183–1192. PMLR,
-
[23]
Cloudscout: a deep neural network for on- board cloud detection on hyperspectral images.Remote Sensing, 12(14):2205, 2020
Gianluca Giuffrida, Lorenzo Diana, Francesco De Gioia, Gionata Benelli, Gabriele Meoni, Massimiliano Donati, and Luca Fanucci. Cloudscout: a deep neural network for on- board cloud detection on hyperspectral images.Remote Sensing, 12(14):2205, 2020. 1
2020
-
[24]
Inductive representation learning on large graphs.Advances in neural information processing systems, 30, 2017
Will Hamilton, Zhitao Ying, and Jure Leskovec. Inductive representation learning on large graphs.Advances in neural information processing systems, 30, 2017. 3
2017
-
[25]
Deep residual learning for image recognition
Kaiming He, Xiangyu Zhang, Shaoqing Ren, and Jian Sun. Deep residual learning for image recognition. InProceed- ings of the IEEE conference on computer vision and pattern recognition, pages 770–778, 2016. 6
2016
-
[26]
Searching for mo- bilenetv3
Andrew Howard, Mark Sandler, Grace Chu, Liang-Chieh Chen, Bo Chen, Mingxing Tan, Weijun Wang, Yukun Zhu, Ruoming Pang, Vijay Vasudevan, et al. Searching for mo- bilenetv3. InProceedings of the IEEE/CVF international conference on computer vision, pages 1314–1324, 2019. 6
2019
-
[27]
Training machine learn- ing models at the edge: A survey.arXiv preprint arXiv:2403.02619, 2024
Aymen Rayane Khouas, Mohamed Reda Bouadjenek, Hakim Hacid, and Sunil Aryal. Training machine learn- ing models at the edge: A survey.arXiv preprint arXiv:2403.02619, 2024. 1, 2
-
[28]
Adam: A Method for Stochastic Optimization
Diederik P Kingma and Jimmy Ba. Adam: A method for stochastic optimization.arXiv preprint arXiv:1412.6980,
work page internal anchor Pith review arXiv
-
[29]
Batchbald: Efficient and diverse batch acquisition for deep bayesian active learning.Advances in neural information processing systems, 32, 2019
Andreas Kirsch, Joost Van Amersfoort, and Yarin Gal. Batchbald: Efficient and diverse batch acquisition for deep bayesian active learning.Advances in neural information processing systems, 32, 2019. 2
2019
-
[30]
Pseudo-label: The simple and effi- cient semi-supervised learning method for deep neural net- works
Dong-Hyun Lee et al. Pseudo-label: The simple and effi- cient semi-supervised learning method for deep neural net- works. InWorkshop on challenges in representation learn- ing, ICML, page 896. Atlanta, 2013. 3
2013
-
[31]
A survey on deep active learning: Recent advances and new frontiers.IEEE Transac- tions on Neural Networks and Learning Systems, 2024
Dongyuan Li, Zhen Wang, Yankai Chen, Renhe Jiang, Weip- ing Ding, and Manabu Okumura. A survey on deep active learning: Recent advances and new frontiers.IEEE Transac- tions on Neural Networks and Learning Systems, 2024. 2
2024
-
[32]
Integrating Semi-Supervised and Active Learning for Semantic Segmentation
Wanli Ma, Oktay Karakus, and Paul L Rosin. Integrating semi-supervised and active learning for semantic segmenta- tion.arXiv preprint arXiv:2501.19227, 2025. 3
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[33]
Deep learning for edge com- puting: A survey.Artificial Intelligence, Computer and Soft- ware Engineering Advances: Proceedings of the CIT 2020 Volume 1, 1326:79, 2021
Miguel Angel Quiroz Martinez. Deep learning for edge com- puting: A survey.Artificial Intelligence, Computer and Soft- ware Engineering Advances: Proceedings of the CIT 2020 Volume 1, 1326:79, 2021. 1
2020
-
[34]
Uncertainty quantification and predictive computational sci- ence
Ryan G McClarren, Penrose McClarren, and R Penrose. Uncertainty quantification and predictive computational sci- ence. 2018. 2
2018
-
[35]
Crc Press, 2013
Joseph Victor Michalowicz, Jonathan M Nichols, and Frank Bucholtz.Handbook of differential entropy. Crc Press, 2013. 5
2013
-
[36]
Cloud-net: An end- to-end cloud detection algorithm for landsat 8 imagery
Sorour Mohajerani and Parvaneh Saeedi. Cloud-net: An end- to-end cloud detection algorithm for landsat 8 imagery. In IGARSS 2019-2019 IEEE international geoscience and re- mote sensing symposium, pages 1029–1032. IEEE, 2019. 5
2019
-
[37]
Towards robust and reproducible active learning using neural networks
Prateek Munjal, Nasir Hayat, Munawar Hayat, Jamshid Sourati, and Shadab Khan. Towards robust and reproducible active learning using neural networks. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 223–232, 2022. 2, 6, 7
2022
-
[38]
Deep co-training for semi-supervised image recogni- tion
Siyuan Qiao, Wei Shen, Zhishuai Zhang, Bo Wang, and Alan Yuille. Deep co-training for semi-supervised image recogni- tion. InProceedings of the european conference on computer vision (eccv), pages 135–152, 2018. 3
2018
-
[39]
Mobilenetv4: Uni- versal models for the mobile ecosystem
Danfeng Qin, Chas Leichner, Manolis Delakis, Marco Fornoni, Shixin Luo, Fan Yang, Weijun Wang, Colby Ban- bury, Chengxi Ye, Berkin Akin, et al. Mobilenetv4: Uni- versal models for the mobile ecosystem. InEuropean Con- ference on Computer Vision, pages 78–96. Springer, 2024. 6
2024
-
[40]
A survey of deep active learning.ACM computing surveys (CSUR), 54(9):1–40, 2021
Pengzhen Ren, Yun Xiao, Xiaojun Chang, Po-Yao Huang, Zhihui Li, Brij B Gupta, Xiaojiang Chen, and Xin Wang. A survey of deep active learning.ACM computing surveys (CSUR), 54(9):1–40, 2021. 2
2021
-
[41]
Proton evaluation of single event effects in the nvidia gpu orin som: Understanding radiation vulnerabilities beyond the soc
Ivan Rodriguez-Ferrandez, Leonidas Kosmidis, Maris Tali, David Steenari, Alex Hands, and Camille B ´elanger- Champagne. Proton evaluation of single event effects in the nvidia gpu orin som: Understanding radiation vulnerabilities beyond the soc. In2024 IEEE 30th International Sympo- sium on On-Line Testing and Robust System Design (IOLTS), pages 1–7, 2024. 1, 7
2024
-
[42]
Deep bayesian active semi-supervised learning
Matthias Rottmann, Karsten Kahl, and Hanno Gottschalk. Deep bayesian active semi-supervised learning. In2018 17th IEEE International Conference on Machine Learning and Applications (ICMLA), pages 158–164. IEEE, 2018. 2
2018
-
[43]
Active hidden markov models for information extraction
Tobias Scheffer, Christian Decomain, and Stefan Wrobel. Active hidden markov models for information extraction. In International symposium on intelligent data analysis, pages 309–318. Springer, 2001. 2, 4
2001
-
[44]
Active Learning for Convolutional Neural Networks: A Core-Set Approach
Ozan Sener and Silvio Savarese. Active learning for convolu- tional neural networks: A core-set approach.arXiv preprint arXiv:1708.00489, 2017. 2
work page Pith review arXiv 2017
-
[45]
Active learning literature survey
Burr Settles. Active learning literature survey. 2009. 2
2009
-
[46]
Fixmatch: Simplifying semi-supervised learning with consistency and confidence
Kihyuk Sohn, David Berthelot, Nicholas Carlini, Zizhao Zhang, Han Zhang, Colin A Raffel, Ekin Dogus Cubuk, Alexey Kurakin, and Chun-Liang Li. Fixmatch: Simplifying semi-supervised learning with consistency and confidence. Advances in neural information processing systems, 33:596– 608, 2020. 3
2020
-
[47]
Jost Tobias Springenberg. Unsupervised and semi- supervised learning with categorical generative adversarial networks.arXiv preprint arXiv:1511.06390, 2015. 2
-
[48]
Diversity enhanced active learning with strictly proper scoring rules.Advances in Neural Information Processing Systems, 34:10906–10918,
Wei Tan, Lan Du, and Wray Buntine. Diversity enhanced active learning with strictly proper scoring rules.Advances in Neural Information Processing Systems, 34:10906–10918,
-
[49]
A survey on active learning: State-of-the-art, practical challenges and research directions.Mathematics, 11(4):820, 2023
Alaa Tharwat and Wolfram Schenck. A survey on active learning: State-of-the-art, practical challenges and research directions.Mathematics, 11(4):820, 2023. 2
2023
-
[50]
Ar- tificial intelligence to advance earth observation: A review of models, recent trends, and pathways forward.IEEE Geo- science and Remote Sensing Magazine, 2024
Devis Tuia, Konrad Schindler, Beg ¨um Demir, Xiao Xiang Zhu, Mrinalini Kochupillai, Sa ˇso Dˇzeroski, Jan N van Rijn, Holger H Hoos, Fabio Del Frate, Mihai Datcu, et al. Ar- tificial intelligence to advance earth observation: A review of models, recent trends, and pathways forward.IEEE Geo- science and Remote Sensing Magazine, 2024. 2
2024
-
[51]
Un- certainty quantification for safe and reliable autonomous ve- hicles: A review of methods and applications.IEEE Trans- actions on Intelligent Transportation Systems, 2025
Ke Wang, Chongqiang Shen, Xingcan Li, and Jianbo Lu. Un- certainty quantification for safe and reliable autonomous ve- hicles: A review of methods and applications.IEEE Trans- actions on Intelligent Transportation Systems, 2025. 3
2025
-
[52]
Convergence of edge com- puting and deep learning: A comprehensive survey.IEEE communications surveys & tutorials, 22(2):869–904, 2020
Xiaofei Wang, Yiwen Han, Victor CM Leung, Dusit Niyato, Xueqiang Yan, and Xu Chen. Convergence of edge com- puting and deep learning: A comprehensive survey.IEEE communications surveys & tutorials, 22(2):869–904, 2020. 1
2020
-
[53]
The la- bel complexity of active learning from observational data
Songbai Yan, Kamalika Chaudhuri, and Tara Javidi. The la- bel complexity of active learning from observational data. Advances in Neural Information Processing Systems, 32,
-
[54]
A survey on deep semi-supervised learning.IEEE transac- tions on knowledge and data engineering, 35(9):8934–8954,
Xiangli Yang, Zixing Song, Irwin King, and Zenglin Xu. A survey on deep semi-supervised learning.IEEE transac- tions on knowledge and data engineering, 35(9):8934–8954,
-
[55]
Cloud detection in op- tical remote sensing images with deep semi-supervised and active learning.IEEE Geoscience and Remote Sensing Let- ters, 20:1–5, 2023
Xudong Yao, Qing Guo, and An Li. Cloud detection in op- tical remote sensing images with deep semi-supervised and active learning.IEEE Geoscience and Remote Sensing Let- ters, 20:1–5, 2023. 4, 6, 7, 8
2023
-
[56]
Towards deeper graph neural networks with differentiable group normalization.Advances in neural information processing systems, 33:4917–4928, 2020
Kaixiong Zhou, Xiao Huang, Yuening Li, Daochen Zha, Rui Chen, and Xia Hu. Towards deeper graph neural networks with differentiable group normalization.Advances in neural information processing systems, 33:4917–4928, 2020. 3
2020
-
[57]
On-device training: A first overview on existing sys- tems.ACM transactions on sensor networks, 20(6):1–39,
Shuai Zhu, Thiemo V oigt, Fatemeh Rahimian, and Jeonggil Ko. On-device training: A first overview on existing sys- tems.ACM transactions on sensor networks, 20(6):1–39,
-
[58]
1, 2 Uncertainty-Guided Edge Learning for Deep Image Regression in Remote Sensing Supplementary Material
-
[59]
Derivations We have the likelihood of a beta distribution given the mean µand the precisionν: p(y|µ, ν) = Γ(ν) Γ(µν)Γ((1−µ)ν) yµν−1(1−y) (1−µ)ν−1 , (12) whereΓ(·)is the gamma function. We can compute the negative log likelihood loss,L N LL, as: LN LL(µ, ν, y) =−logp(y|µ, ν) =−[log Γ(ν) Γ(µν)Γ((1−µ)ν) + logy µν−1 + log (1−y) (1−µ)ν−1] = log Γ(µν)Γ((1−µ)ν) ...
-
[60]
Benchmarking on RS applications Fig. 8, Fig. 9, and Fig. 10 present the benchmarking results of UGEL against representative methods onRSRC-S2us- ing the ResNet18, MobileNetV3, and MobileNetV4 back- bones, respectively. These results are consistent with those observed onRSRC-L8andRSLC, as shown in Fig. 6 in the main paper. Additionally, Fig. 11 and Fig. 12...
-
[61]
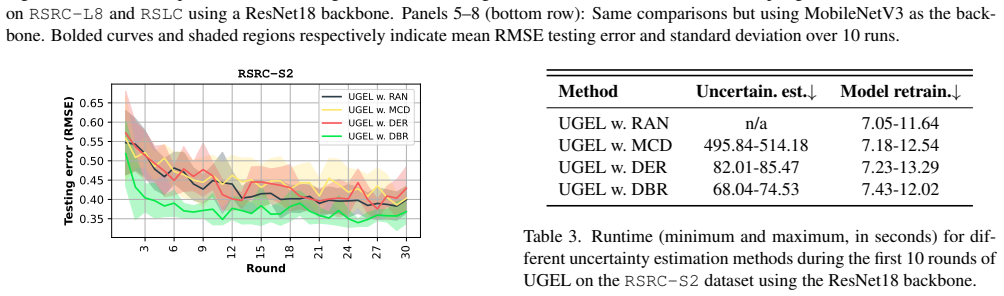
[T1] Effects of different uncertainty estimation methods on UGEL
UGEL ablation studies 10.1. [T1] Effects of different uncertainty estimation methods on UGEL. The experimental setup, hyperparameter configurations, and evaluation metric were kept consistent with those de- scribed in the main paper. We evaluated the impact of different uncertainty estimation methods within the UGEL framework. In addition to Fig. 7 in the...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.