Recognition: unknown
Duplicate-Aware Shift-and-Lift Carleman Linearization:Structure, Complexity, and Comparative Evaluation
Pith reviewed 2026-05-08 03:57 UTC · model grok-4.3
The pith
Shift-and-lift Carleman linearization with duplicate coalescing removes repeated monomials to cut overhead while keeping truncated dynamics intact.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
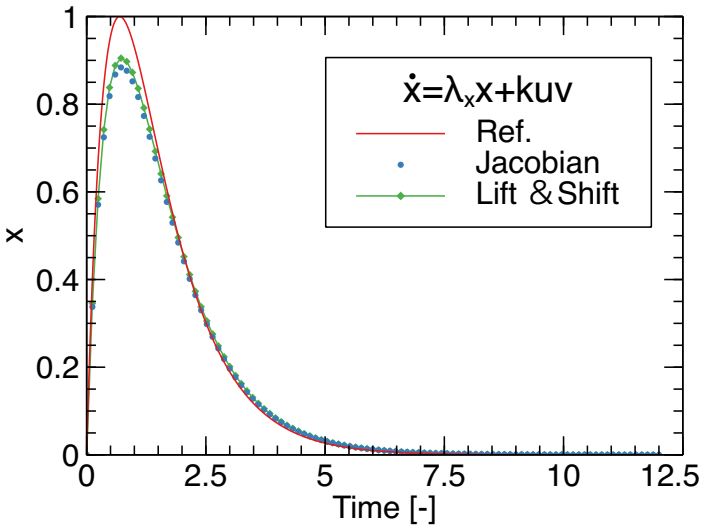
The resulting workflow combines symmetry-reduced monomial bases, packed exponent-key indexing, and sparse triplet coalescing to preserve truncated affine dynamics while reducing index-resolution overhead and write-path irregularity. Paired with moving-center expansion that jointly updates shift and lift, the method yields regime-dependent accuracy gains over Jacobian linearization on the bilinear driver and logistic interaction benchmarks, with both approaches converging under refinement.
What carries the argument
Duplicate-aware coefficient coalescing inside the shift-and-lift monomial basis, performed via symmetry reduction and sparse triplet assembly.
If this is right
- Higher truncation orders become feasible because monomial count no longer grows with full duplication.
- The assembled linear operator exactly matches the truncated nonlinear dynamics after coalescing.
- Preprocessing and index-resolution costs scale better with state dimension and order.
- Accuracy per computational cost improves relative to Jacobian linearization in some operating regimes.
- Truncation error sources can be isolated separately from duplication artifacts.
Where Pith is reading between the lines
- The same coalescing step could be reused inside repeated linearizations along a control trajectory without full re-assembly each time.
- The symmetry-reduced bases might combine with other lifted representations such as Koopman operators to further compress high-dimensional models.
- Testing on systems with known closed-form solutions would directly quantify how much of the observed error reduction comes from the moving center versus the duplicate removal.
Load-bearing premise
Jointly updating shift and lift around moving centers does not create new convergence problems or excessive recomputation for higher-order terms.
What would settle it
Measure the number of unique monomials after coalescing versus without coalescing at fixed truncation order on the bilinear benchmark; if the count does not drop substantially while trajectory error stays the same, the overhead-reduction claim fails.
Figures

read the original abstract
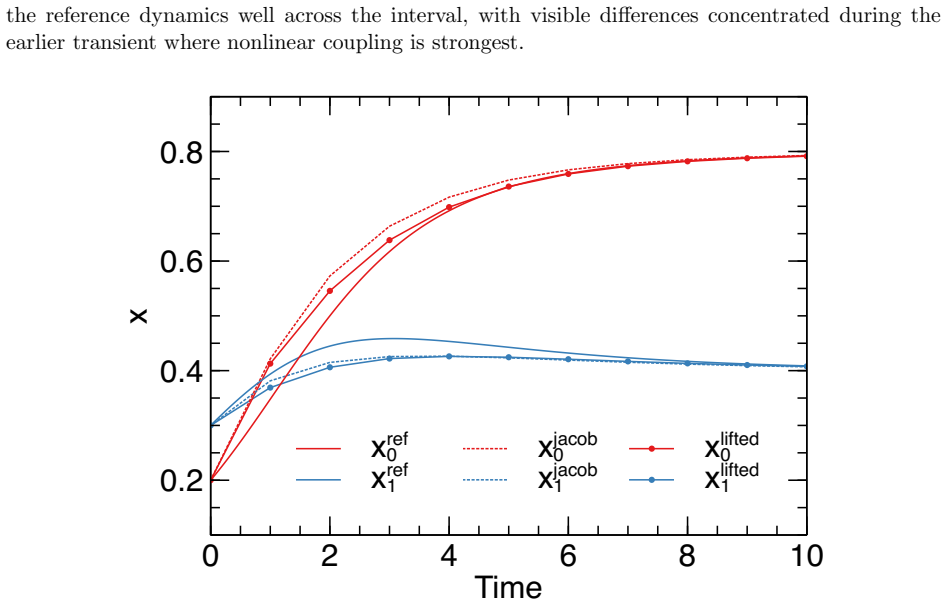
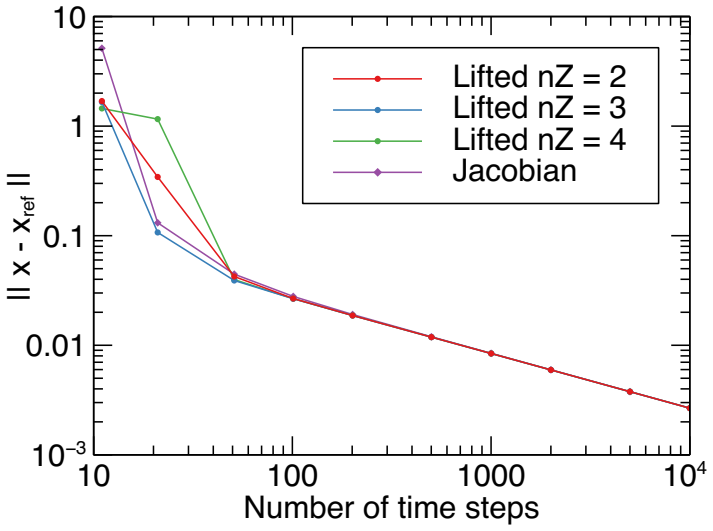
The primary objective of this study is to remove duplicated monomial contributions that proliferate in Carleman linearization as state dimension and truncation order increase. To do so, we adopt a shift-and-lift architecture, since it exposes repeated exponent targets and allows duplicate-aware coefficient coalescing during lifted-operator assembly. This architecture also makes high-order truncation practical, but that regime intensifies local convergence and closure sensitivity for higher-order nonlinearities. We therefore pair shift-and-lift with a moving-center expansion so that shift and lift are updated jointly around evolving local centers, improving validity of the truncated model along the trajectory. The resulting workflow combines symmetry-reduced monomial bases, packed exponent-key indexing, and sparse triplet coalescing to preserve truncated affine dynamics while reducing index-resolution overhead and write-path irregularity. We analyze variable growth, preprocessing complexity, and truncation-induced error mechanisms, and we compare against Jacobian linearization through fixed-step error, admissible step size, and cost-at-target-accuracy criteria. Two benchmarks (bilinear driver and logistic interaction) show convergence under refinement for both approaches, with regime-dependent accuracy gains for the proposed method rather than universal superiority.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a duplicate-aware shift-and-lift Carleman linearization that removes proliferating duplicate monomial contributions via symmetry-reduced monomial bases, packed exponent-key indexing, and sparse triplet coalescing during lifted-operator assembly. It pairs this architecture with a moving-center expansion that jointly updates shift and lift around evolving local centers to improve validity of the truncated affine dynamics along trajectories, particularly under high-order truncation. Complexity analysis covers variable growth and preprocessing, while comparative evaluation against Jacobian linearization uses fixed-step error, admissible step size, and cost-at-target-accuracy on two benchmarks (bilinear driver and logistic interaction), reporting convergence under refinement with regime-dependent gains rather than universal superiority.
Significance. If the structural optimizations and moving-center updates preserve the claimed efficiency without offsetting recomputation costs, the work would advance practical high-order Carleman approximations for nonlinear systems in computational engineering by reducing index-resolution overhead and write-path irregularity. The explicit analysis of truncation-induced error mechanisms and the benchmark comparisons provide a useful framework for assessing when such methods outperform standard linearization, with potential applicability to control and simulation tasks.
major comments (1)
- [moving-center expansion and workflow] The moving-center expansion (abstract and workflow description): the central claim that jointly updating shift and lift around evolving centers improves validity of the truncated model without new local convergence problems or excessive recomputation is load-bearing, yet the manuscript provides no explicit bound on center-update frequency, no analysis of interactions with the symmetry-reduced monomial basis or sparse triplet coalescing, and no demonstration that truncated affine dynamics remain preserved under repeated recentering. This directly affects whether the reported reductions in index-resolution overhead hold in the high-order regimes where sensitivity is already noted.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed review. The identification of the need for stronger theoretical grounding of the moving-center expansion is helpful, and we address this major comment below by outlining the revisions we will make.
read point-by-point responses
-
Referee: [moving-center expansion and workflow] The moving-center expansion (abstract and workflow description): the central claim that jointly updating shift and lift around evolving centers improves validity of the truncated model without new local convergence problems or excessive recomputation is load-bearing, yet the manuscript provides no explicit bound on center-update frequency, no analysis of interactions with the symmetry-reduced monomial basis or sparse triplet coalescing, and no demonstration that truncated affine dynamics remain preserved under repeated recentering. This directly affects whether the reported reductions in index-resolution overhead hold in the high-order regimes where sensitivity is already noted.
Authors: We agree that the current manuscript provides only a high-level description and empirical motivation for the moving-center expansion without the requested formal elements. In the revised version we will add: (1) an explicit bound on center-update frequency obtained from the local truncation remainder of the Carleman series together with a Lipschitz estimate on the nonlinearity along the trajectory, guaranteeing that recentering is triggered only when the expansion point would otherwise cause the affine approximation to exceed a user-specified error tolerance; (2) a short analysis showing that the symmetry-reduced monomial basis and packed exponent-key indexing remain invariant under recentering (the origin shift simply translates the exponent vectors while preserving their symmetry orbits, so the sparse triplet coalescing step can be performed incrementally on the updated keys without full re-indexing); (3) a concise invariance argument establishing that the truncated affine dynamics are preserved because the joint shift-and-lift operator commutes with the recentering transformation in the reduced basis. These additions will be accompanied by an extended numerical study on the bilinear and logistic benchmarks that quantifies the amortized preprocessing cost and confirms that recomputation does not offset the index-resolution savings even at high truncation orders. The revisions therefore directly substantiate that the reported overhead reductions continue to hold in the regimes of interest. revision: yes
Circularity Check
No circularity: structural algorithmic workflow with independent error comparisons
full rationale
The paper presents a shift-and-lift Carleman linearization augmented by moving-center expansion, symmetry-reduced monomial bases, packed exponent-key indexing, and sparse triplet coalescing. These are described as direct structural modifications to operator assembly that preserve truncated affine dynamics while reducing overhead. No equations, fitted parameters, or predictions are shown that reduce by construction to the inputs (e.g., no parameter fitted on one data subset then relabeled as a prediction on a related quantity). Comparisons to Jacobian linearization rely on external metrics such as fixed-step error, admissible step size, and cost-at-target-accuracy on two benchmarks, which are independent of the method's internal definitions. No self-citation chains or uniqueness theorems are invoked as load-bearing premises. The derivation chain is therefore self-contained as an engineering description rather than a tautological reduction.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Nonlinear systems can be represented as infinite-dimensional linear systems via monomial lifting, with truncation error controlled by order.
Reference graph
Works this paper leans on
-
[1]
Carleman,Application de la th´ eorie des ` equations int´ egrales lin´ eaires aux syst` emes d’´ equations diff´ erentielles non lin´ eaires, Acta Mathematica, 59:63–87, 1932
T. Carleman,Application de la th´ eorie des ` equations int´ egrales lin´ eaires aux syst` emes d’´ equations diff´ erentielles non lin´ eaires, Acta Mathematica, 59:63–87, 1932
1932
-
[2]
A. W. Harrow, A. Hassidim, and S. Lloyd,Quantum algorithm for linear systems of equations, Physical Review Letters, 103:150502, 2009
2009
-
[3]
Weber and W
H. Weber and W. Mathis,Adapting the range of validity for the Carleman linearization, Ad- vances in Radio Science, 14:51–54, 2016
2016
-
[4]
A. Rauh, J. Minisini, and H. Aschemann,Carleman Linearization for Control and for State and Disturbance Estimation of Nonlinear Dynamical Processes, IFAC Proceedings Volumes, 42(13):455–460, 2009
2009
-
[5]
Rotondo, G
D. Rotondo, G. Luta, and J. H. U. Aarv˚ ag,Towards a Taylor-Carleman bilinearization ap- proach for the design of nonlinear state-feedback controllers, European Journal of Control, 68:100670, 2022
2022
-
[6]
J.-P. Liu, H. O. Kolden, H. K. Krovi, N. F. Loureiro, K. Trivisa, and A. M. Childs,Efficient quantum algorithm for dissipative nonlinear differential equations, Proceedings of the National Academy of Sciences, 118(35):e2026805118, 2021
2021
-
[7]
Krovi,Improved quantum algorithms for linear and nonlinear differential equations, Quan- tum, 7:913, 2023
H. Krovi,Improved quantum algorithms for linear and nonlinear differential equations, Quan- tum, 7:913, 2023
2023
-
[8]
Akiba, Y
T. Akiba, Y. Morii, and K. Maruta,Carleman linearization approach for chemical kinetics integration toward quantum computation, Scientific Reports, 13:3935, 2023
2023
-
[9]
Sanavio, R
C. Sanavio, R. Scatamacchia, C. de Falco, and S. Succi,Three Carleman routes to the quantum simulation of classical fluids, Physics of Fluids, 36(5):057143, 2024
2024
-
[10]
H.-C. Wu, J. Wang, and X. Li,Quantum algorithms for nonlinear dynamics: Revisiting Car- leman linearization with no dissipative conditions, SIAM Journal on Scientific Computing, 47(2):A943–A970, 2025
2025
-
[11]
P. C. S. Costa, P. Schleich, M. E. S. Morales, and D. W. Berry,Further improving quantum algorithms for nonlinear differential equations via higher-order methods and rescaling, npj Quantum Information, 11:141, 2025
2025
-
[12]
Tennie, S
F. Tennie, S. Laizet, S. Lloyd, and L. Magri,Quantum computing for nonlinear differential equations and turbulence, Nature Reviews Physics, 7:220–230, 2025
2025
-
[13]
I. Novikau and I. Joseph,Globalizing the Carleman linear embedding method for nonlinear dynamics, arXiv:2510.15715, 2025
-
[14]
B. Heinzelreiter and J. W. Pearson,Carleman Linearization of Parabolic PDEs: Well- posedness, convergence, and efficient numerical methods, arXiv:2510.00722, 2025
-
[15]
Motee and Q
N. Motee and Q. Sun,Carleman-Fourier linearization of nonlinear real dynamical systems, Discrete and Continuous Dynamical Systems - B, 34:167–184, 2026
2026
-
[16]
Shi and X
D. Shi and X. Yang,Koopman Spectral Linearization vs. Carleman Linearization: A Compu- tational Comparison Study, Mathematics, 12(14):2156, 2024. 12
2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.