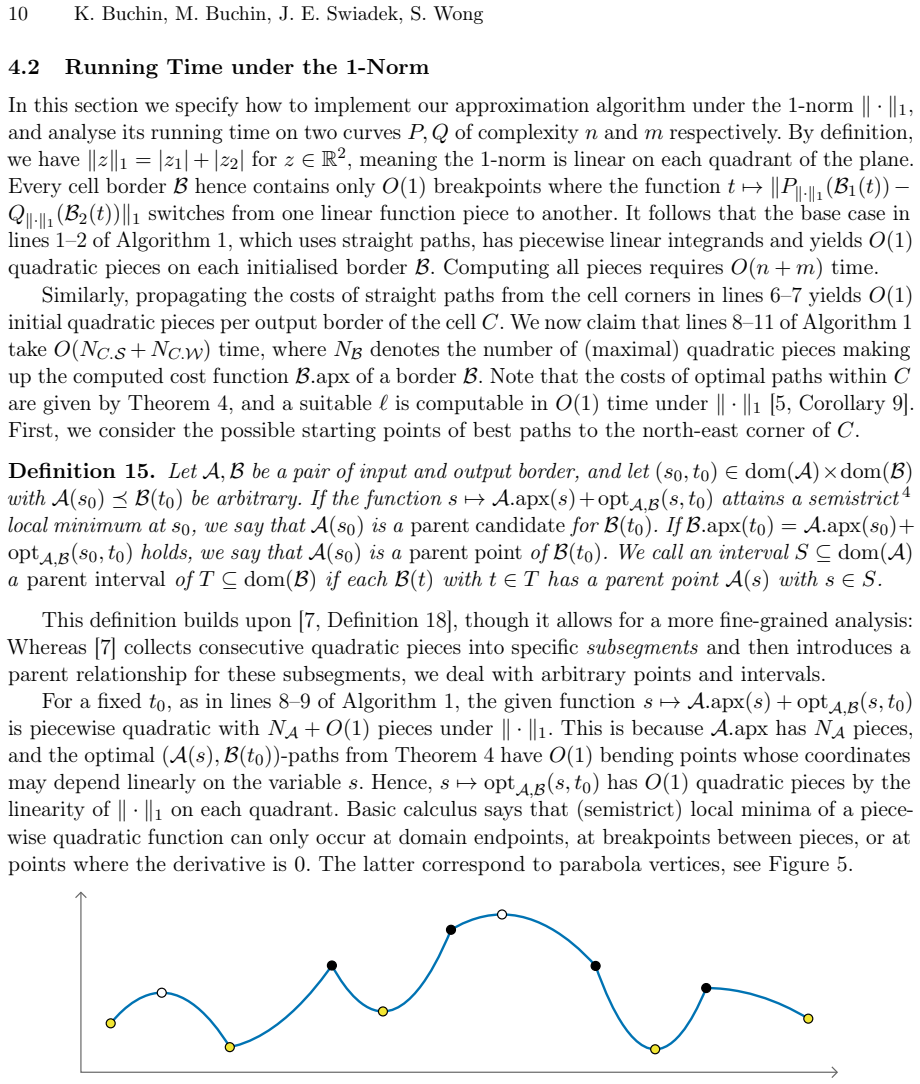
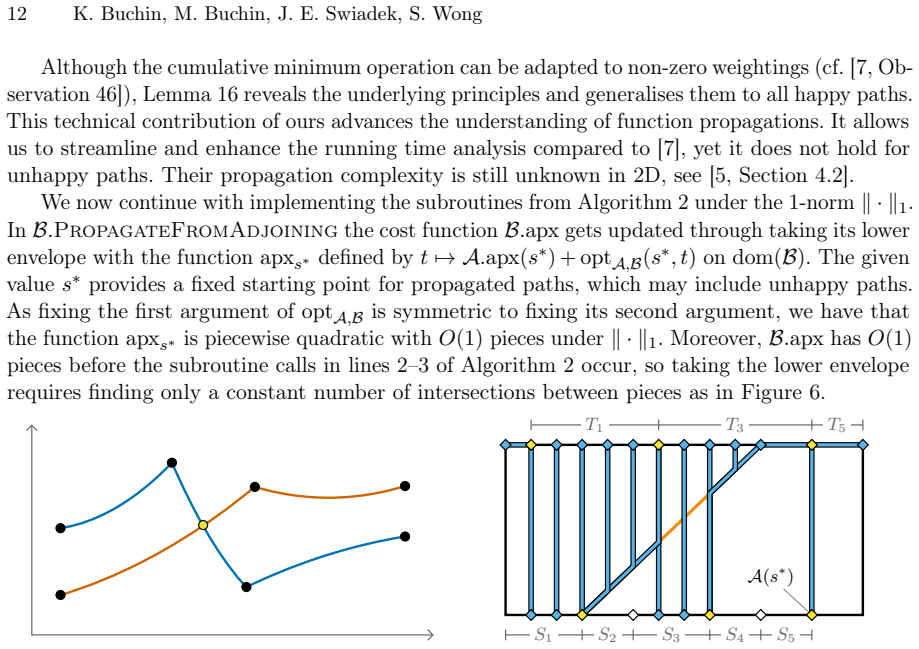
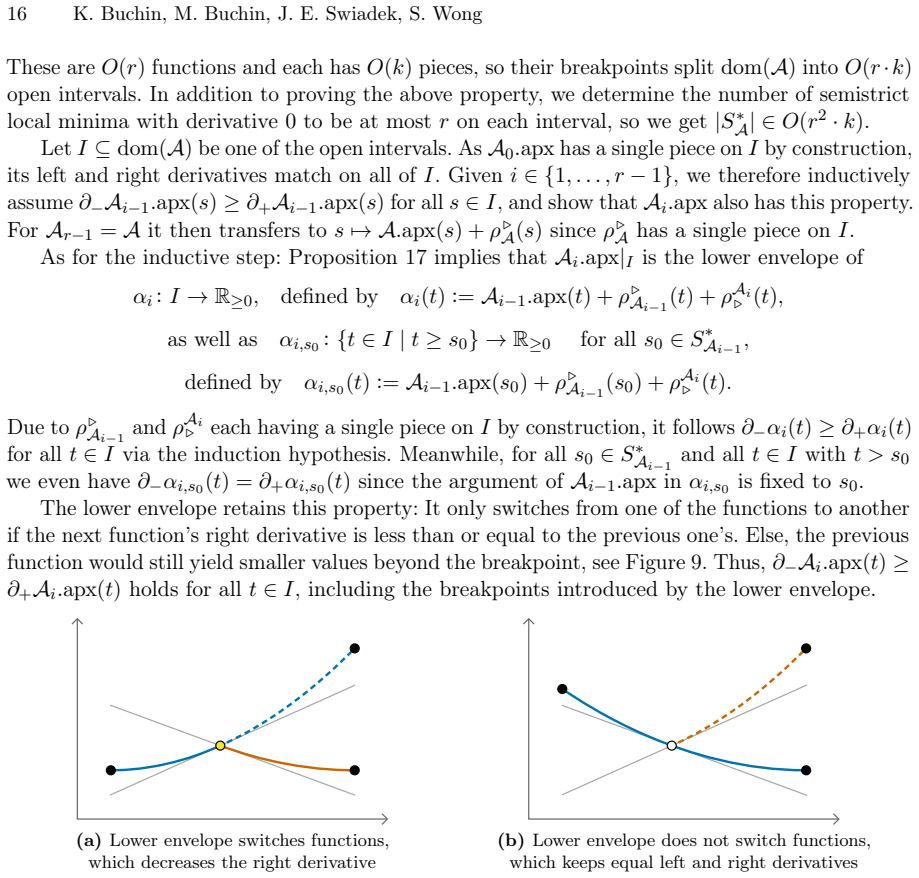
Recognition: unknown
A Constant-Factor Approximation for Continuous Dynamic Time Warping in 2D
Pith reviewed 2026-05-08 03:22 UTC · model grok-4.3
The pith
A polynomial-time algorithm approximates continuous dynamic time warping between 2D curves within a factor of 5.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
We introduce a 5-approximation algorithm with running time O(n^5) for continuous dynamic time warping of polygonal curves in 2D under the 1-norm. This is the first constant-factor approximation for 2D CDTW with polynomial running time. We extend the method to all polygonal norms and use it to obtain a (5 + ε)-approximation in O(n^5 / ε^{1/2}) time for CDTW under any fixed norm, including the Euclidean 2-norm.
What carries the argument
A dynamic programming approach that discretizes the continuous warping path for polygonal curves, bounding the approximation error by a factor of 5 under the 1-norm.
Load-bearing premise
The dynamic programming table correctly computes a value within factor 5 of the true continuous minimum warping cost for any pair of polygonal curves.
What would settle it
A pair of simple polygonal curves in 2D where the algorithm's output exceeds 5 times the true CDTW distance.
Figures






read the original abstract
Continuous Dynamic Time Warping (CDTW) is a robust similarity measure for polygonal curves that has recently found a variety of applications. Despite its practical use, not much is known about the algorithmic complexity of computing it in 2D, especially when one requires either an exact solution or strong approximation guarantees. We fill this gap by introducing a $5$-approximation algorithm with running time $O(n^5)$ under the 1-norm. This is the first constant-factor approximation for 2D CDTW with polynomial running time. We extend our algorithm to all polygonal norms on $\mathbb{R}^2$, which we subsequently use in order to achieve a $(5+\varepsilon)$-approximation with time complexity $O(n^5 / \varepsilon^{1/2})$ for CDTW in 2D under any fixed norm. The latter result in particular includes the usual Euclidean 2-norm.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a 5-approximation algorithm for Continuous Dynamic Time Warping (CDTW) between two polygonal curves in 2D under the L1 norm, running in O(n^5) time. The approach uses dynamic programming over pairs of segments augmented with states for alignment parameters; L1 separability and the triangle inequality are used to charge the cost of any continuous optimal matching to a discrete path whose cost is at most 5 times larger. The result is extended to all polygonal norms and yields a (5 + ε)-approximation under an arbitrary fixed norm in time O(n^5 / ε^{1/2}). The analysis holds for general (possibly self-intersecting) curves.
Significance. If the central DP construction and charging argument are correct, this supplies the first constant-factor polynomial-time approximation for 2D CDTW, addressing a clear gap between the practical use of CDTW and its theoretical complexity. The constructive nature of the algorithm, its generality to self-intersecting curves, and the clean extension to (5 + ε) approximations under any fixed norm are genuine strengths.
minor comments (3)
- [§3] §3 (DP recurrence): the precise definition of the alignment-parameter states is given only in text; adding a small diagram or table enumerating the O(1) states per segment pair would improve readability without lengthening the paper.
- [§4] §4 (error analysis): the factor-5 charging argument is stated for the L1 case, but the transition to the (5 + ε) result for general norms via polygonal-norm approximation is only sketched; a single sentence clarifying the dependence of the hidden constant on the norm would remove ambiguity.
- [Abstract] Abstract and §1: the input size parameter n is used without explicit statement that each curve has Θ(n) vertices; a parenthetical clarification would prevent minor confusion for readers outside computational geometry.
Simulated Author's Rebuttal
We thank the referee for the positive summary, significance assessment, and recommendation of minor revision. We are pleased that the novelty of the first constant-factor polynomial-time approximation for 2D CDTW, the generality to self-intersecting curves, and the clean extension to (5 + ε) approximations under arbitrary fixed norms were recognized.
Circularity Check
No significant circularity; constructive DP approximation with independent analysis
full rationale
The manuscript constructs a dynamic programming algorithm over segment pairs with auxiliary states for alignment parameters, then proves the 5-approximation bound by charging any continuous optimum to a discrete feasible path via the triangle inequality and L1 separability. These charging arguments rely on standard metric properties that hold for arbitrary polygonal curves and are independent of the algorithm's recurrence or the target result. No fitted parameters, self-definitional equations, or load-bearing self-citations appear in the derivation chain. The result is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Polygonal curves in R^2 and standard norm properties allow discretization without loss of the approximation guarantee.
Reference graph
Works this paper leans on
-
[1]
On map-matching vehicle tracking data
Sotiris Brakatsoulas, Dieter Pfoser, Randall Salas, and Carola Wenk. On map-matching vehicle tracking data. InProceedings of the 31st International Conference on Very Large Data Bases, pages 853–864. VLDB Endowment, 2005. URL:https://dl.acm.org/doi/10.5555/1083592.1083691
-
[2]
PhD thesis, University of Sydney, 2022
Milutin Brankovic.Graphs and Trajectories in Practical Geometric Problems. PhD thesis, University of Sydney, 2022
2022
-
[3]
(k, l)-medians clustering of trajectories using Continuous Dynamic Time Warping
Milutin Brankovic, Kevin Buchin, Koen Klaren, André Nusser, Aleksandr Popov, and Sampson Wong. (k, l)-medians clustering of trajectories using Continuous Dynamic Time Warping. InProceedings of the 28th International Conference on Advances in Geographic Information Systems, pages 99–110. ACM, 2020.doi:10.1145/3397536.3422245
-
[4]
Efim M. Bronstein. Approximation of convex sets by polytopes.Journal of Mathematical Sciences, 153(6):727–762, 2008.doi:10.1007/S10958-008-9144-X. 20 K. Buchin, M. Buchin, J. E. Swiadek, S. Wong
-
[5]
Fundamentals of Computing Continuous Dynamic Time Warping in 2D under Different Norms
Kevin Buchin, Maike Buchin, Jan Erik Swiadek, and Sampson Wong. Fundamentals of computing Continuous Dynamic Time Warping in 2D under different norms. In20th International Conference and Workshops on Algorithms and Computation, pages 467–482. Springer, 2026.arXiv:2511.20420, doi:10.1007/978-981-95-7127-7_31
work page internal anchor Pith review Pith/arXiv arXiv doi:10.1007/978-981-95-7127-7_31 2026
-
[6]
Exact algorithms for partial curve matching via the Fréchet distance
Kevin Buchin, Maike Buchin, and Yusu Wang. Exact algorithms for partial curve matching via the Fréchet distance. InProceedings of the Twentieth Annual ACM-SIAM Symposium on Discrete Algorithms, pages 645–654. SIAM, 2009.doi:10.1137/1.9781611973068.71
-
[7]
Kevin Buchin, André Nusser, and Sampson Wong. Computing Continuous Dynamic Time Warping of time series in polynomial time.Journal of Computational Geometry, 16(1):765–799, 2025.doi: 10.20382/JOCG.V16I1A21
-
[8]
PhDthesis, Freie Universität Berlin, 2007
MaikeBuchin.On the Computability of the Fréchet Distance between Triangulated Surfaces. PhDthesis, Freie Universität Berlin, 2007. URL:https://refubium.fu-berlin.de/handle/fub188/1909
2007
-
[9]
Unconstrained submodular maximization with constant adaptive complexity , booktitle =
Deeparnab Chakrabarty and Chaitanya Swamy. Approximation algorithms for minimum norm and ordered optimization problems. InProceedings of the 51st Annual ACM SIGACT Symposium on Theory of Computing, pages 126–137. ACM, 2019.doi:10.1145/3313276.3316322
-
[10]
New results on a general class of minimum norm optimization problems
Kuowen Chen, Jian Li, Yuval Rabani, and Yiran Zhang. New results on a general class of minimum norm optimization problems. In52nd International Colloquium on Automata, Languages, and Programming, pages 50:1–50:20. Schloss Dagstuhl – Leibniz-Zentrum für Informatik, 2025.doi: 10.4230/LIPICS.ICALP.2025.50
-
[11]
Alon Efrat, Quanfu Fan, and Suresh Venkatasubramanian. Curve matching, time warping, and light fields: New algorithms for computing similarity between curves.Journal of Mathematical Imaging and Vision, 27(3):203–216, 2007.doi:10.1007/S10851-006-0647-0
-
[12]
Omer Gold and Micha Sharir. Dynamic Time Warping and Geometric Edit Distance: Breaking the quadratic barrier.ACM Transactions on Algorithms, 14(4):50:1–50:17, 2018. doi:10.1145/3230734
-
[13]
On the generalized Fréchet distance and its applications
Theodor Gutschlag and Sabine Storandt. On the generalized Fréchet distance and its applications. InProceedings of the 30th International Conference on Advances in Geographic Information Systems, pages 35:1–35:10. ACM, 2022.doi:10.1145/3557915.3560970
-
[14]
Sariel Har-Peled, Benjamin Raichel, and Eliot W. Robson. The Fréchet distance unleashed: Ap- proximating a dog with a frog. In41st International Symposium on Computational Geometry, pages 54:1–54:13. Schloss Dagstuhl – Leibniz-Zentrum für Informatik, 2025.arXiv:2407.03101, doi:10.4230/LIPICS.SOCG.2025.54
-
[15]
Continuous Dynamic Time Warping for clustering curves
Koen Klaren. Continuous Dynamic Time Warping for clustering curves. Master’s thesis, Eindhoven University of Technology, 2020. URL:https://research.tue.nl/en/studentTheses/continuou s-dynamic-time-warping-for-clustering-curves
2020
-
[16]
Anil Maheshwari, Jörg-Rüdiger Sack, and Christian Scheffer. Approximating the integral Fréchet distance.Computational Geometry, 70–71:13–30, 2018.doi:10.1016/J.COMGEO.2018.01.001
-
[17]
Mario E. Munich and Pietro Perona. Continuous Dynamic Time Warping for translation-invariant curve alignment with applications to signature verification. InProceedings of the Seventh IEEE International Conference on Computer Vision, pages 108–115. IEEE, 1999.doi:10.1109/ICCV.199 9.791205
-
[18]
Approximating a convex body by a polytope using the Epsilon-Net Theorem
Márton Naszódi. Approximating a convex body by a polytope using the Epsilon-Net Theorem. Discrete & Computational Geometry, 61(3):686–693, 2019.doi:10.1007/S00454-018-9977-0
-
[19]
Helmut H. Schaefer and Manfred P. Wolff.Topological Vector Spaces. Springer, 2nd edition, 1999. doi:10.1007/978-1-4612-1468-7
-
[20]
Subpixel contour matching using continuous dynamic programming
Bruno Serra and Marc Berthod. Subpixel contour matching using continuous dynamic programming. In1994 Proceedings of IEEE Conference on Computer Vision and Pattern Recognition, pages 202–207. IEEE, 1994.doi:10.1109/CVPR.1994.323830
-
[21]
Optimal subpixel matching of contour chains and segments
Bruno Serra and Marc Berthod. Optimal subpixel matching of contour chains and segments. In Proceedings of IEEE International Conference on Computer Vision, pages 402–407. IEEE, 1995. doi:10.1109/ICCV.1995.466911. A Constant-Factor Approximation for CDTW in 2D 21
-
[22]
A survey of trajectory distance measures and performance evaluation.The VLDB Journal, 29(1):3–32, 2020.doi:10.1007/ S00778-019-00574-9
Han Su, Shuncheng Liu, Bolong Zheng, Xiaofang Zhou, and Kai Zheng. A survey of trajectory distance measures and performance evaluation.The VLDB Journal, 29(1):3–32, 2020.doi:10.1007/ S00778-019-00574-9
2020
-
[23]
Silveira, Kevin Buchin, Stef Sijben, Ross S
Yaguang Tao, Alan Both, Rodrigo I. Silveira, Kevin Buchin, Stef Sijben, Ross S. Purves, Patrick Laube, Dongliang Peng, Kevin Toohey, and Matt Duckham. A comparative analysis of trajectory similarity measures.GIScience & Remote Sensing, 58(5):643–669, 2021.doi:10.1080/15481603.2 021.1908927. A Proof of Proposition 9 Proposition 9. For every borderB the fun...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.