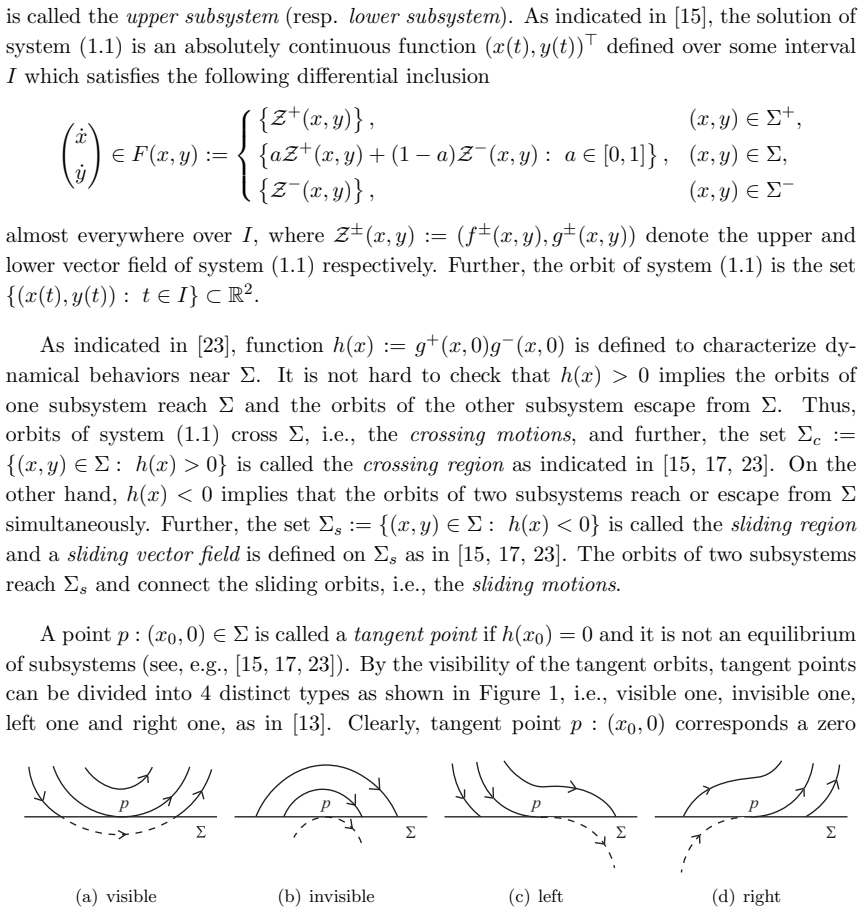
Recognition: unknown
Bifurcations of grazing loops of arbitrary tangent multiplicity in piecewise-smooth systems
Pith reviewed 2026-05-08 04:32 UTC · model grok-4.3
The pith
Grazing loops in piecewise-smooth systems bifurcate into crossing limit cycles and sliding loops whose numbers are fixed by the order of tangency.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
A grazing loop of arbitrary tangent multiplicity bifurcates into crossing limit cycles and sliding loops whose numbers stand in a direct quantitative relation to that multiplicity; the relation is obtained by replacing fixed-parameter perturbations with a functional perturbation that uses functions to record the recurrences and by applying a localization method that renders the recurrence near the tangent point equivalent to the recurrence around the cycle, thereby permitting a well-defined Poincaré return map.
What carries the argument
Functional perturbation with functions together with a localization method that equates the local recurrence near the tangent point and the global recurrence around the cycle, so that a Poincaré return map can be written for any multiplicity.
Load-bearing premise
The functional perturbation using functions plus the localization step together succeed in capturing the recurrences for arbitrarily high multiplicity and in making those recurrences equivalent so a return map exists.
What would settle it
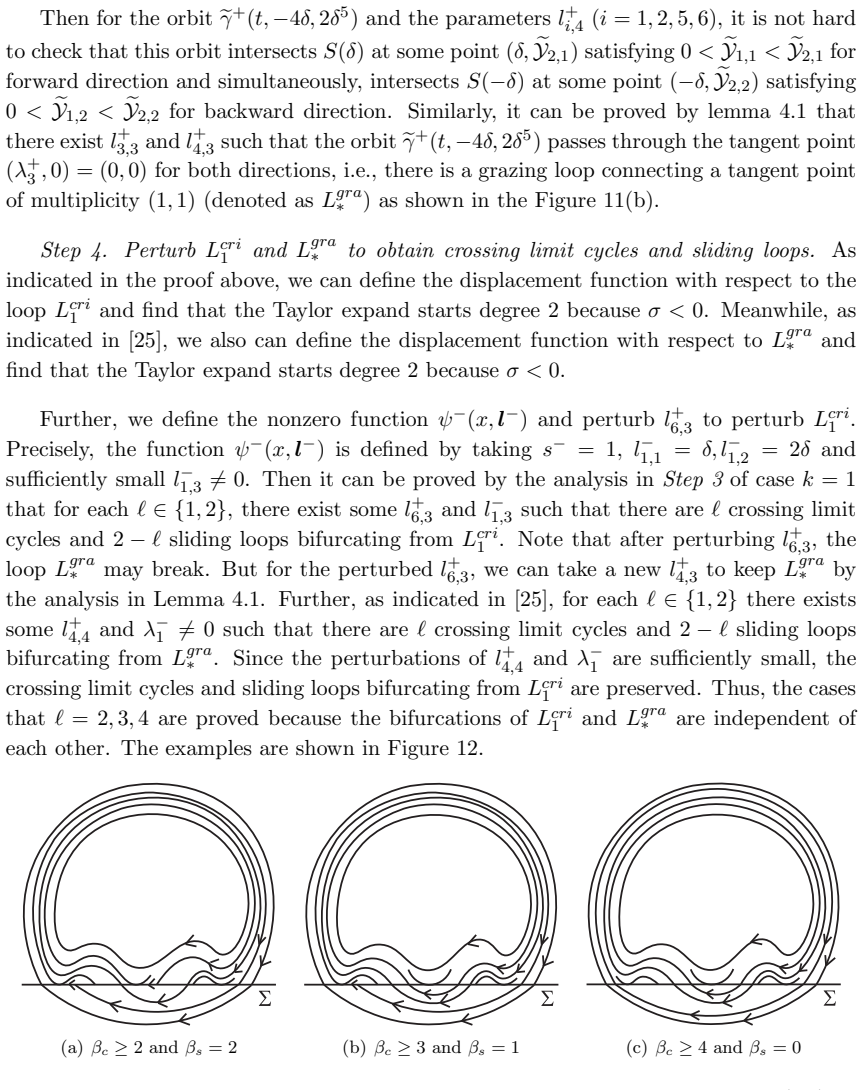
Simulate or construct an explicit piecewise-smooth example with a grazing loop of multiplicity three or four, count the crossing limit cycles and sliding loops that appear after perturbation, and check whether the observed counts satisfy the quantitative relation claimed for that multiplicity.
Figures










read the original abstract
In piecewise-smooth differential systems, a hyperbolic limit cycle of a subsystem loses its structural stability if it grazes the switching manifold at a tangent point. Such a cycle is called a grazing loop and in this paper we investigate its bifurcations for arbitrary tangent multiplicity. For the low-multiplicity tangency, the recurrences are comprehensively captured by a functional perturbation with two parameters in previous publications, where the parameters characterize the recurrences near the tangent point and the limit cycle respectively. However, for high-multiplicity tangency, these parameters fail to capture the recurrences and thus, Poincare return maps can not be defined as usual. To address these challenges, we construct a functional perturbation with functions to clarify the recurrences and simultaneously, propose a localization method to make these two recurrences equivalent. We finally establish a quantitative relationship between the multiplicity of tangency and the numbers of crossing limit cycles, sliding loops bifurcating from the grazing loop and the number of tangent points on these sliding loops.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper studies bifurcations of grazing loops in piecewise-smooth systems for arbitrary tangent multiplicity. For low-multiplicity cases, prior work used two-parameter functional perturbations to capture recurrences near the tangent point and the cycle. For high multiplicity, these parameters are insufficient, so the authors introduce a functional perturbation using functions (rather than fixed parameters) together with a localization method that equates the two recurrences, permitting definition of a Poincaré return map. They derive a quantitative relation between the tangency multiplicity and the numbers of crossing limit cycles, bifurcating sliding loops, and tangent points on those loops.
Significance. If the constructions and counts hold, the work supplies a general framework that removes the multiplicity restriction of earlier parameter-based approaches, enabling systematic analysis of grazing-loop bifurcations in non-smooth systems. This is potentially useful for applications in impact oscillators and switched systems where high-order tangencies arise.
major comments (2)
- [§4.2] §4.2, the localization construction: the claim that the two recurrences become equivalent for arbitrary multiplicity rests on the functional perturbation absorbing all higher-order terms; however, the error estimate between the localized map and the true return map is only sketched for multiplicity ≤4 and is not shown to remain controlled when the multiplicity m increases, which is load-bearing for the counting relation in Theorem 5.1.
- [Theorem 5.1] Theorem 5.1: the quantitative relation between multiplicity m and the numbers of crossing cycles, sliding loops, and tangent points is stated without an explicit inductive step or generating-function argument that would confirm the formula continues to hold for m>5; the provided low-multiplicity verification does not automatically extend.
minor comments (2)
- [§3] Notation for the functional perturbation (e.g., the symbol F_m) is introduced in §3 but used inconsistently in the figures; a uniform definition would improve readability.
- [Introduction] The abstract and introduction cite prior low-multiplicity results but omit the precise reference numbers for the two-parameter case; adding these would clarify the extension.
Simulated Author's Rebuttal
We thank the referee for the careful reading and constructive comments on our manuscript. We address the two major comments point by point below, agreeing that additional rigor is needed in the error analysis and the generality of the counting argument. We will revise the manuscript to incorporate these improvements.
read point-by-point responses
-
Referee: [§4.2] §4.2, the localization construction: the claim that the two recurrences become equivalent for arbitrary multiplicity rests on the functional perturbation absorbing all higher-order terms; however, the error estimate between the localized map and the true return map is only sketched for multiplicity ≤4 and is not shown to remain controlled when the multiplicity m increases, which is load-bearing for the counting relation in Theorem 5.1.
Authors: We agree that the error estimate requires a general treatment for arbitrary m. The localization in §4.2 is constructed so that the functional perturbation is chosen to match and absorb all terms in the Taylor expansion up to order m at the tangent point, making the two recurrences equivalent by design. The sketch for m≤4 illustrates the cancellation mechanism. In the revision we will add a general error bound: after localization the difference between the localized map and the true return map is controlled by a remainder of order O(ε^{m+1}), where ε is the size of the perturbation; this bound is independent of m because the functional perturbation can be scaled to dominate higher-order contributions uniformly. This will be stated explicitly with the necessary estimates on the remainder terms. revision: yes
-
Referee: [Theorem 5.1] Theorem 5.1: the quantitative relation between multiplicity m and the numbers of crossing cycles, sliding loops, and tangent points is stated without an explicit inductive step or generating-function argument that would confirm the formula continues to hold for m>5; the provided low-multiplicity verification does not automatically extend.
Authors: The counts in Theorem 5.1 follow from the number of zeros of the localized return map, whose leading term has degree determined by m. We verified the explicit numbers for small m by direct computation of the map. To make the extension to arbitrary m fully rigorous, we will insert an inductive argument in the revised manuscript: assume the relation holds up to multiplicity k; for multiplicity k+1 the additional tangency condition introduces one further factor in the leading term of the map, which by the structure of the functional perturbation adds a predictable number of new zeros (corresponding to the additional crossing cycles, sliding loops, and tangent points). The base cases and the inductive step together establish the formula for all m. revision: yes
Circularity Check
No significant circularity in derivation chain
full rationale
The paper constructs a functional perturbation (using functions rather than fixed parameters) and a localization method to equate recurrences near the tangent point and around the grazing loop for arbitrary tangent multiplicity. This construction enables definition of a Poincaré return map and derivation of the stated quantitative relationship between multiplicity and counts of crossing limit cycles, sliding loops, and tangent points. The approach explicitly extends (but does not presuppose the results of) prior low-multiplicity analyses cited in the abstract. No step reduces by definition, by fitting a parameter to the same data it then predicts, or by a load-bearing self-citation chain that renders the central counts tautological. The derivation is therefore self-contained as a constructive mathematical argument.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Standard local and global recurrence assumptions for piecewise-smooth flows near a hyperbolic limit cycle and a switching manifold
Reference graph
Works this paper leans on
-
[1]
K. da S. Andrade, O. M. L. Gomide, D. D. Novaes, Bifurcatio n diagrams of global connections in Filippov systems, Nonlin. Anal.: Hybrid Syst. 50(2023), Paper No. 101397
2023
-
[2]
K. da S. Andrade, M. R. Jeffrey, R. M. Martins, M. A. Teixeir a, On the Dulac’s problem for piecewise analytic vector fields, J. Differential Equa. 266(2019), 2259-2273
2019
-
[3]
Bonet-Rev´ es, J
C. Bonet-Rev´ es, J. Larrosa, T. M. Seara, Regularizatio n around a generic codimension one fold-fold singularity, J. Differential Equa. 265(2018), 1761-1838
2018
-
[4]
C. A. Buzzi, C. Pessoa, J. C. Medrado, Monodromy and Dulac ’s problem for piecewise analytical planar vector fields, Bull. Sci. math. 188(2023), Paper No. 103338
2023
-
[5]
H. Chen, S. Duan, Y. Tang, J. Xie, Global dynamics of a mech anical system with dry friction, J. Differential Equa. 265(2018), 5490-5519
2018
-
[6]
di Bernardo, C
M. di Bernardo, C. J. Budd, A. R. Champneys, Grazing, skip ping and sliding: Analysis of the nonsmooth dynamics of the DC/DC buck converter, Nonlinearity 11(1998), 859-890
1998
-
[7]
di Bernardo, C
M. di Bernardo, C. J. Budd, A. R. Champneys, Grazing and Bo rder-Collision in Piecewise-Smooth Systems: A Unified Analytical Framework, Physical review letters 86(2001), 2553-2556
2001
-
[8]
di Bernardo, C
M. di Bernardo, C. J. Budd, A. R. Champneys, P. Kowalczyk, Piecewise-Smooth Dynamical Systems: Theory and Applications , Springer-Verlag, London, 2008
2008
-
[9]
di Bernardo, C
M. di Bernardo, C. J. Budd, A. R. Champneys, P. Kowalczyk, A. Nordmark, G. Tost, P. Piiroinen, Bifurcations in nonsmooth dynamical systems, SIAM Rev. 50(2008), 629-701
2008
-
[10]
Esteban, E
M. Esteban, E. Freire, E. Ponce, F. Torres, On normal for ms and return maps for pseudo-focus points, J. Math. Anal. Appl. 507(2022), Paper No. 125774. 27
2022
-
[11]
Esteban, E
M. Esteban, E. Freire, E. Ponce, F. Torres, Piecewise sm ooth systems with a pseudo-focus: A normal form approach, Appl. Math. Model. 115(2023), 886-897
2023
-
[12]
Z. Fang, X. Chen, Global dynamics of a piecewise smooth s ystem with a fold-cusp and general parameters, Qual. Theo. Dyn. Syst. 21(2022), Paper No. 55
2022
-
[13]
Z. Fang, X. Chen, Bifurcations of tangent points and cri tical loops in piecewise-smooth systems, J. Nonlinear Sci. 35(2025), Paper No. 117
2025
-
[14]
Z. Fang, X. Chen, Bifurcations of grazing loops connect ing one high multiplicity tangent point, SCI- ENCE CHINA Mathematics Available online
-
[15]
A. F. Filippov, Differential Equations with Discontinuous Righthand Sides , Kluwer Academic Pub- lishers, Dordrecht, 1988
1988
-
[16]
Freire, E
E. Freire, E. Ponce, F. Torres, On the critical crossing cycle bifurcation in planar Filippov systems, J. Differential Equa. 259(2015), 7086-7107
2015
-
[17]
Guardia, T
M. Guardia, T. M. Seara, M. A. Teixeira, Generic bifurca tions of low codimension of planar Filippov systems, J. Differential Equa. 250(2011), 1967-2023
2011
-
[18]
J. K. Hale, Dynamics and Bifurcations , Springer-Verlag, New York, 1991
1991
-
[19]
M. Han, W. Zhang, On Hopf bifurcation in non-smooth plan ar systems, J. Differential Equa. 248(2010), 2399-2416
2010
-
[20]
Huang, Z
L. Huang, Z. Guo, J. Wang, Theory and Application of Differential Equations with Discon tinuous Righthand Sides , Science Press, Beijing, 2011 (in Chinese)
2011
-
[21]
Kunze, Non-Smooth Dynamical Systems , Springer-Verlag, Berlin, 2000
M. Kunze, Non-Smooth Dynamical Systems , Springer-Verlag, Berlin, 2000
2000
-
[22]
Yu. A. Kuznetsov, Elements of Applied Bifurcation Theory , Springer-verlag, New York, 2004
2004
-
[23]
Yu. A. Kuznetsov, S. Rinaldi, A. Gragnani, One-paramet er bifurcations in planar Filippov systems, Int. J. Bifurc. Chaos 13(2003), 2157-2188
2003
-
[24]
J. M. Lee, Introduction of Smooth Manifold , Springer-Verlag, New York, 2012
2012
-
[25]
T. Li, X. Chen, Degenerate grazing-sliding bifurcatio ns in planar Filippov systems, J. Differential Equa. 269(2020), 11396-11434
2020
-
[26]
Liang, M
F. Liang, M. Han, Degenerate Hopf bifurcation in nonsmo oth planar systems, Int. J. Bifurc. Chaos 22(2012), Paper No. 1250057
2012
-
[27]
Liang, M
F. Liang, M. Han, X. Zhang, Bifurcation of limit cycles f rom generalized homoclinic loops in planar piecewise smooth systems, J. Differential Equa. 255(2013), 4403-4436
2013
-
[28]
D. D. Novaes, L. A. Silva, Lyapunov coefficients for monod romic tangential singularities in Filippov vector fields, J. Differential Equa. 300(2021), 565-596
2021
-
[29]
D. D. Novaes, L. A. Silva, Unveiling the cyclicity of mon odromic tangential singularities: insights beyond the pseudo-Hopf bifurcation, SIAM J. Appl. Dyn. Syst. 24(2025), 165-186
2025
-
[30]
D. D. Novaes, M. A. Teixeira, I. O. Zeli, The generic unfo lding of a codimension-two connection to a two-fold singularity of planar Filippov systems, Nonlinearity 31(2018), 2083-2104
2018
-
[31]
T. E. Siller, A missing generic local fold-fold bifurca tion in planar Filippov systems, Int. J. Bifurc. Chaos 32(2022), Paper No. 2250031
2022
-
[32]
Zhang, B
J. Zhang, B. Feng, Geometric Theory and Bifurcation Problems in Ordinary Differ ential Equations , Peking University Press, Beijing, 1981 (in Chinese). 28
1981
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.