Recognition: no theorem link
Kirigami-Structured Electronic Capsule for Long-Term Continuous Gastric Monitoring
Pith reviewed 2026-05-11 01:59 UTC · model grok-4.3
The pith
A kirigami-structured capsule can stay in the stomach for a week while continuously sensing radiation and then disassemble on command for safe passage.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
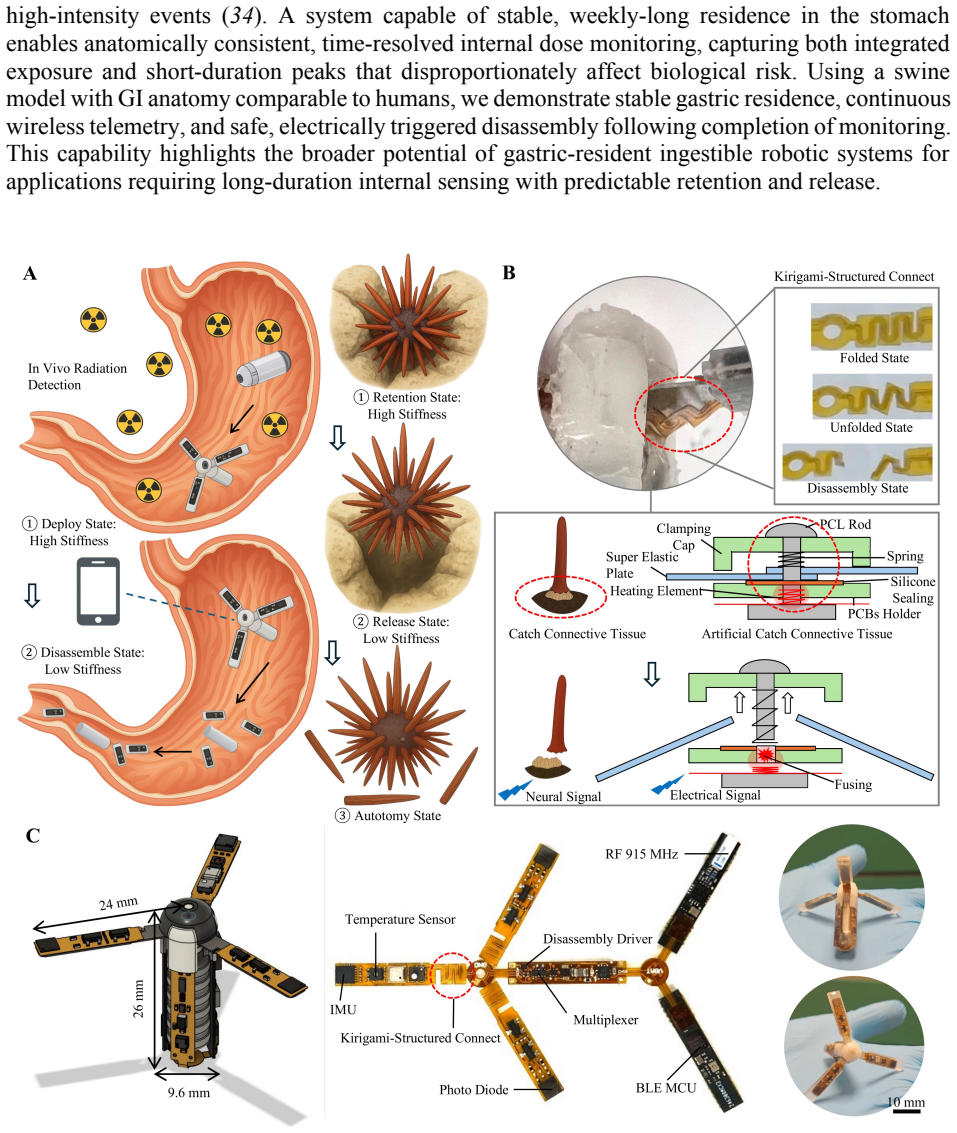
Integration of a kirigami-patterned flexible circuit spanning the capsule body and deployable arms, combined with electrically activated polycaprolactone joints and adaptive dual-band telemetry, produces a gastric-resident system capable of week-long operation, stable retention, sustained real-time data transmission, and controlled disassembly for safe gastrointestinal transit, as demonstrated through continuous gastric radiation monitoring in swine.
What carries the argument
Kirigami-patterned flexible printed circuit board that spans the capsule body and deployable superelastic arms, allowing dense integration of sensors, power, and wireless modules while tolerating large deformations during gastric residence.
If this is right
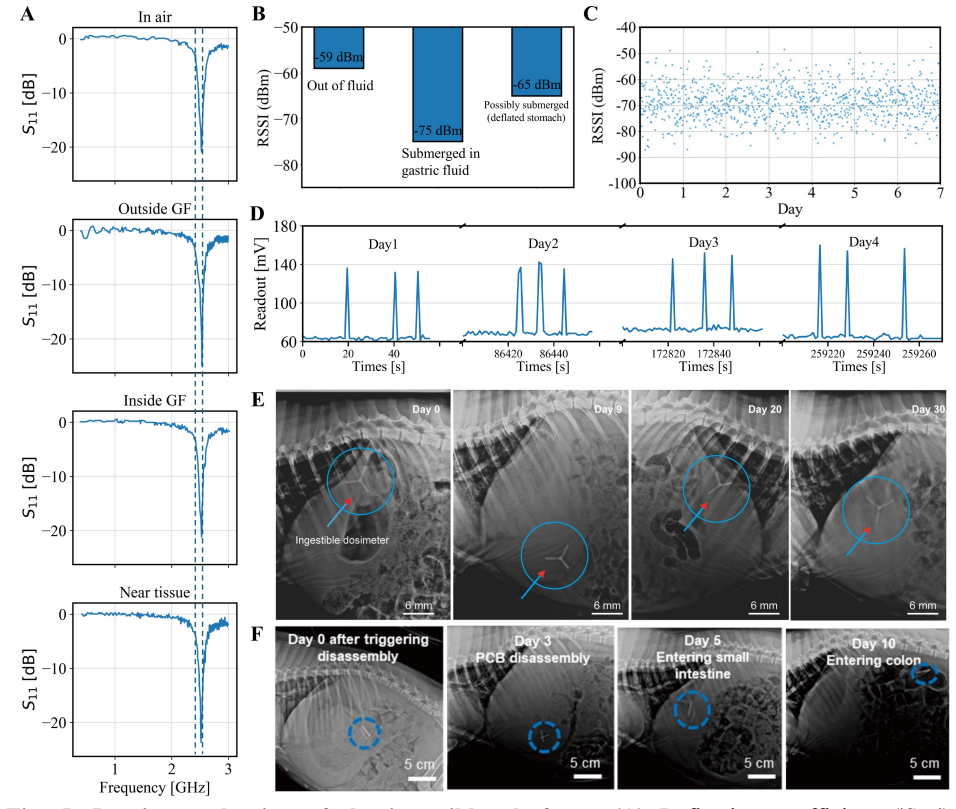
- Continuous internal monitoring of gastric radiation exposure becomes possible without repeated device ingestion or reliance on external dosimeters.
- Stable week-long gastric residence is achieved through the combination of flexible kirigami architecture and on-demand thermal release.
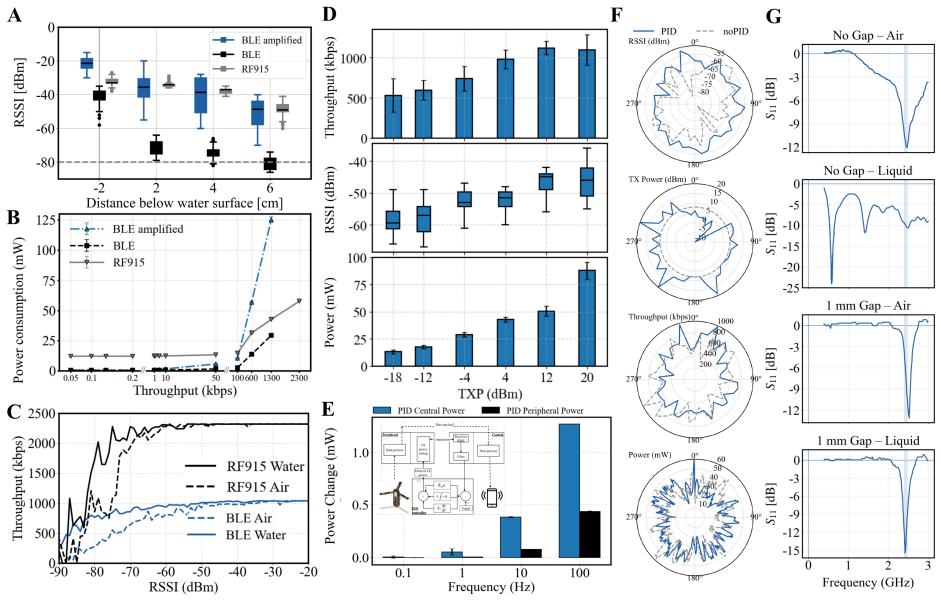
- Reliable telemetry persists in the attenuating gastric environment by switching between Bluetooth Low Energy and sub-gigahertz bands based on signal strength and energy cost.
- Safe gastrointestinal passage follows triggered disassembly without dependence on variable chemical or peristaltic triggers.
- Kirigami-enabled integration offers a scalable route to other long-term gastric-resident robotic sensing systems.
Where Pith is reading between the lines
- The same structural approach could support long-term tracking of additional gastric signals such as pH or pressure without increasing device size.
- Extending the retention window might reduce the number of ingestions needed for chronic patient monitoring.
- The mechanical and release principles could transfer to ingestible devices aimed at other parts of the digestive tract.
- Coupling the platform with onboard drug release or therapeutic actuation would create combined diagnostic-therapeutic gastric systems.
Load-bearing premise
The kirigami structure, heat-responsive joints, and wireless system will keep their mechanical strength, signal reliability, and safe release behavior under the range of stomach motions, acid levels, and individual differences without early failure or tissue irritation.
What would settle it
A week-long swine study in which the capsule either loses wireless contact for more than a few hours, disassembles before the electrical trigger is applied, or shows tissue damage or incomplete passage on post-study examination.
Figures

read the original abstract
Ingestible electronic systems enable non-invasive, in situ sensing within the gastrointestinal (GI) tract, yet clinical translation has been limited by uncontrolled transit, short operational lifetimes, and unreliable wireless communication that prevent continuous monitoring. Here, we present a gastric-resident ingestible robotic platform that achieves week-long operation through integration of a bioinspired, electrically triggered release mechanism with a kirigami-enabled electronic architecture. A kirigami-patterned flexible printed circuit board spans the capsule body and deployable superelastic arms, enabling high-density integration of sensing, power management, and wireless modules within a constrained volume while tolerating large mechanical deformation during gastric residence. Stable retention and on-demand disassembly are achieved using thermally responsive polycaprolactone joints that transition from rigid to compliant states under electrical activation, avoiding dependence on variable chemical triggers. Reliable telemetry in the highly attenuating gastric environment is maintained using a dual-band Bluetooth Low Energy and sub-gigahertz module with RSSI- and throughput-aware adaptive transmission, balancing link robustness and energy consumption. We demonstrate long-term, continuous monitoring of gastric radiation exposure, enabling early detection of dose accumulation and providing a promising in vivo alternative to wearable or handheld dosimeters. Swine studies confirm stable gastric residence, sustained real-time telemetry, and safe gastrointestinal passage following triggered disassembly. This work establishes kirigami-enabled integration as a scalable strategy for long-term gastric-resident robotic systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript presents a kirigami-structured ingestible electronic capsule for week-long gastric monitoring of radiation exposure. It combines a kirigami-patterned flexible PCB for high-density integration of sensors, power, and dual-band (BLE + sub-GHz) telemetry with thermally responsive polycaprolactone joints for electrically triggered on-demand disassembly and stable retention. Swine studies are stated to confirm prolonged gastric residence, continuous real-time telemetry, and safe GI passage after release, positioning the device as an in vivo alternative to external dosimeters.
Significance. If the swine-study outcomes hold with adequate sample sizes, controls, and quantitative metrics, the work would advance ingestible robotic systems by demonstrating a scalable mechanical-integration strategy (kirigami + triggered joints) that overcomes short transit times and unreliable links, enabling continuous in-situ sensing applications beyond radiation dosimetry.
major comments (2)
- [Abstract] Abstract: the central claims rest on swine studies that 'confirm stable gastric residence, sustained real-time telemetry, and safe gastrointestinal passage,' yet the provided text supplies no sample sizes, quantitative retention durations, telemetry error rates, RSSI/throughput data, disassembly success rates, or statistical comparisons. This absence prevents assessment of whether the kirigami architecture and PCL joints actually deliver the claimed week-long performance under variable gastric conditions.
- [Abstract] Abstract: the assertion that the dual-band adaptive transmission 'balances link robustness and energy consumption' is presented without supporting link-budget calculations, attenuation measurements in gastric fluid, or power-consumption figures, leaving the reliability claim unverified despite being load-bearing for continuous monitoring.
minor comments (2)
- [Abstract] Abstract: terminology is inconsistent ('gastric-resident ingestible robotic platform' vs. title's 'Kirigami-Structured Electronic Capsule'); a single defined term would improve clarity.
- [Abstract] Abstract: the phrase 'electrically triggered release mechanism' is introduced without a brief description of the electrical activation method or power source, which would help readers understand the bioinspired aspect.
Simulated Author's Rebuttal
We thank the referee for the constructive comments on the abstract. We agree that greater quantitative specificity would strengthen the summary of our swine-study results and will revise the abstract accordingly. We address each major comment below.
read point-by-point responses
-
Referee: [Abstract] Abstract: the central claims rest on swine studies that 'confirm stable gastric residence, sustained real-time telemetry, and safe gastrointestinal passage,' yet the provided text supplies no sample sizes, quantitative retention durations, telemetry error rates, RSSI/throughput data, disassembly success rates, or statistical comparisons. This absence prevents assessment of whether the kirigami architecture and PCL joints actually deliver the claimed week-long performance under variable gastric conditions.
Authors: We agree that the abstract, as currently written, does not include the requested quantitative metrics and that this limits immediate assessment of the performance claims. The full manuscript reports these details from the swine studies in the Results section. We will revise the abstract to incorporate key quantitative values (sample size, retention durations, telemetry reliability metrics, and disassembly success rates) so that the central claims can be evaluated directly from the summary. revision: yes
-
Referee: [Abstract] Abstract: the assertion that the dual-band adaptive transmission 'balances link robustness and energy consumption' is presented without supporting link-budget calculations, attenuation measurements in gastric fluid, or power-consumption figures, leaving the reliability claim unverified despite being load-bearing for continuous monitoring.
Authors: The abstract summarizes the dual-band strategy at a high level. Supporting link-budget calculations, gastric-fluid attenuation data, and power-consumption measurements are provided in the Methods and Results sections of the full manuscript. We will revise the abstract to include a brief reference to these supporting results (or indicative quantitative values) within the length constraints, thereby anchoring the balancing claim more explicitly. revision: partial
Circularity Check
No significant circularity; hardware demonstration without derivations
full rationale
The provided abstract and full text contain no equations, models, fitted parameters, predictions, or derivation chains of any kind. Claims rest on experimental swine-study outcomes for retention, telemetry, and release rather than any mathematical reduction or self-referential construction. No self-citations, ansatzes, or uniqueness theorems appear in the text, so none of the enumerated circularity patterns apply. The work is self-contained as an engineering demonstration.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption Thermally responsive polycaprolactone joints transition reliably from rigid to compliant under electrical activation in vivo
- domain assumption Dual-band telemetry maintains reliable links despite gastric attenuation
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.