Recognition: unknown
Synthesis of Limit Cycles and Reference Tracking via Switching Affine Systems
Pith reviewed 2026-05-08 06:43 UTC · model grok-4.3
The pith
Switching affine systems with general partitions and external signals approximate globally stable limit cycles of nonlinear ODEs via constrained optimization from sampled data.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
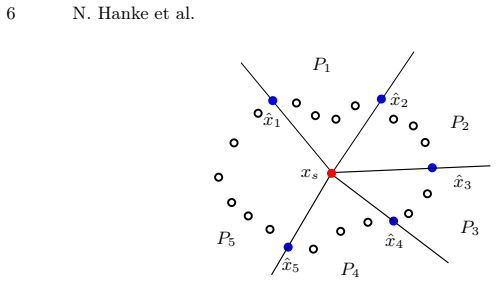
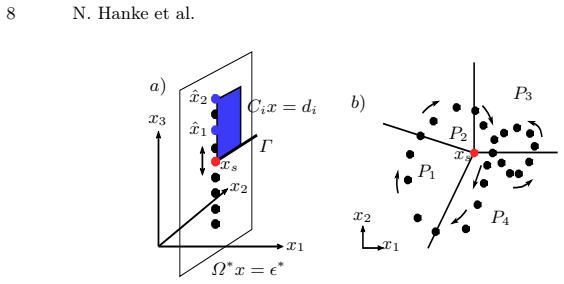
Starting from sampled data of a nonlinear ODE, the synthesis minimizes approximation error to a limit cycle generated by a switching affine model while applying stability constraints to guarantee global stability; the optimization is solved over general state-space partitions augmented by external signals. For the resulting periodic switching system, reference tracking uses multiple Lyapunov functions to obtain less conservative convergence than a common Lyapunov function would allow.
What carries the argument
Constrained numerical optimization that trades off data-fitting error against Lyapunov stability constraints on a switching affine system, where the state space is divided into regions each following its own affine dynamics, possibly modulated by external signals.
If this is right
- A feasible optimization solution produces a switching affine model whose trajectories converge globally to a limit cycle that approximates the sampled nonlinear behavior.
- The common Lyapunov function enforces the global stability guarantee for the synthesized limit cycle.
- Reference tracking for the periodic model converges with guarantees that are less conservative than single-Lyapunov results.
- The method applies to higher-dimensional state spaces and more flexible partitions than prior two-region or planar approaches.
Where Pith is reading between the lines
- The technique could support data-driven controller design for engineered periodic systems like mechanical oscillators or switched power converters without needing closed-form nonlinear analysis.
- Coupling the partition choice with data-driven learning might scale the method to state spaces too large for manual design.
- The same switching-affine template might serve as an intermediate model for stability certification of hybrid or sampled-data controllers.
Load-bearing premise
The nonlinear ODE can be sufficiently well approximated by a switching affine system under the chosen state-space partition and external signals, and the numerical optimizer will find a feasible solution satisfying the stability constraints.
What would settle it
For a nonlinear oscillator with a known stable limit cycle, such as the van der Pol system, running the synthesis and finding that the resulting switching model produces neither a matching periodic orbit nor global stability in simulation would show the claim does not hold.
Figures












read the original abstract
This paper introduces a novel method to approximate limit cycles of nonlinear ODEs by use of switching affine dynamics in order to ease data-based modeling and analysis. Previous approaches to approximating limit cycles by switching systems have been largely confined to simple partitions into two-regions or low-dimensional (often planar) settings. In contrast, this study utilizes more general partitions in higher-dimensional state spaces, augmented by external signals, to develop a synthesis scheme that guarantees a globally stable limit cycle. The synthesis task is formulated and solved based on constrained numerical optimization. Starting from sampled data of the nonlinear dynamics, the method minimizes the error between the data and the limit cycle generated by the switching affine model, while employing stability constraints to ensure global stability. Based on the obtained model, the paper tackles the problem of reference tracking for switching affine systems with periodic behavior. While the approximation scheme is based on a common Lyapunov function, the reference tracking approach uses multiple Lyapunov functions to achieve less conservative convergence results. The principle and effectiveness of the proposed methods are illustrated through a set of examples.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes a data-driven synthesis method for globally stable limit cycles in nonlinear ODEs by approximating them with switching affine systems. It employs general state-space partitions augmented by external signals and formulates the task as a constrained numerical optimization that minimizes fitting error to sampled data while enforcing stability via a common Lyapunov function. The work then extends the model to reference tracking, replacing the common Lyapunov function with multiple Lyapunov functions for less conservative convergence guarantees, and demonstrates the approach on numerical examples.
Significance. If the central claims hold, the contribution lies in extending switched-system limit-cycle synthesis beyond low-dimensional or two-region partitions to higher-dimensional settings with external signals, while providing an optimization-based procedure that directly incorporates stability constraints. The shift to multiple Lyapunov functions for the tracking task is a standard relaxation that could improve practical applicability. The data-based nature and explicit handling of periodic behavior may aid control design for systems with limit cycles.
minor comments (3)
- The abstract and introduction claim that the optimization 'guarantees a globally stable limit cycle,' but the dependence of feasibility on the choice of partition and external signals is not analyzed; a brief discussion of when the constrained problem is expected to admit solutions would strengthen the presentation.
- In the reference-tracking section, the benefit of multiple Lyapunov functions over the common Lyapunov function used for synthesis is asserted but not quantified (e.g., via convergence-rate comparisons or conservatism metrics on the same example); adding such a comparison would clarify the practical gain.
- Notation for the switching signal, the role of external signals, and the precise definition of the limit-cycle error metric should be introduced earlier and used consistently to improve readability for readers unfamiliar with switched affine systems.
Simulated Author's Rebuttal
We thank the referee for the positive summary and significance assessment of our work on synthesis of limit cycles via switching affine systems. The recommendation for minor revision is noted, and we will incorporate any editorial or minor improvements in the revised version. No specific major comments were listed in the report.
Circularity Check
No significant circularity detected
full rationale
The paper formulates limit-cycle synthesis as a constrained numerical optimization that fits switching affine dynamics to sampled data from the nonlinear ODE while enforcing global stability via a common Lyapunov function drawn from standard switched-systems theory. This does not reduce to a tautology or self-referential fit: the model is constructed to approximate external data and the stability certificate is an independent constraint rather than presupposed in the dynamics definition. The reference-tracking extension uses multiple Lyapunov functions as a recognized relaxation without circular reduction. No load-bearing self-citations, uniqueness theorems, or ansatzes imported from prior author work appear in the central derivation chain.
Axiom & Free-Parameter Ledger
axioms (2)
- domain assumption A common Lyapunov function exists that certifies global stability of the synthesized limit cycle.
- domain assumption Multiple Lyapunov functions can be constructed to obtain less conservative convergence for reference tracking.
Reference graph
Works this paper leans on
-
[1]
International Journal of Control 31(6), 1041–1105 (1980)
Atherton, D., Dorrah, H.: A survey on non-linear oscillat ions. International Journal of Control 31(6), 1041–1105 (1980)
1980
-
[2]
Bernardo, M., Budd, C., Champneys, A.R., Kowalczyk, P.: P iecewise-smooth dy- namical systems: theory and applications, vol. 163. Spring er Science & Business Media (2008)
2008
-
[3]
Journal of mathematical analysis and appli cations 253(2), 671– 690 (2001)
Coll, B., Gasull, A., Prohens, R.: Degenerate hopf bifurc ations in discontinuous planar systems. Journal of mathematical analysis and appli cations 253(2), 671– 690 (2001)
2001
-
[4]
Demidovich, B.P.: Lectures on stability theory (1967)
1967
-
[5]
Automatica pp
Dörfler, F., Bullo, F.: Synchronization in complex networ ks of phase oscillators: A survey. Automatica pp. 1539–1564 (2014)
2014
-
[6]
International Journal o f Bifurcation and Chaos 8(11), 2073–2097 (1998)
Freire, E., Ponce, E., Rodrigo, F., Torres, F.: Bifurcati on sets of continuous piece- wise linear systems with two zones. International Journal o f Bifurcation and Chaos 8(11), 2073–2097 (1998)
2073
-
[7]
Nonlinear Analysis: Theory, Methods & Applications 74(18), 7532–7542 (2011)
Gaiko, V.A.: Multiple limit cycle bifurcations of the fitz hugh–nagumo neuronal model. Nonlinear Analysis: Theory, Methods & Applications 74(18), 7532–7542 (2011)
2011
-
[8]
Acta Biotheoretica 69(4), 857–874 (2021)
Gonze, D., Ruoff, P.: The goodwin oscillator and its legacy . Acta Biotheoretica 69(4), 857–874 (2021)
2021
-
[9]
Automatica 40(1), 21–35 (2004)
Habets, L., Van Schuppen, J.H.: A control problem for affine dynamical systems on a full-dimensional polytope. Automatica 40(1), 21–35 (2004)
2004
-
[10]
In: European Control Conference
Hanke, N., Liu, Z., Stursberg, O.: Approximation of limi t cycles by using planar switching affine systems with guarantees for uniqueness and s tability. In: European Control Conference. pp. 1460–1465 (2024)
2024
-
[11]
In: American Control Conference
Hanke, N., Liu, Z., Stursberg, O.: Approximation of plan ar periodic behavior from data with stability guarantees using switching affine system s. In: American Control Conference. pp. 1944–1949 (2025)
1944
-
[12]
Hanke, N., Liu, Z., Stursberg, O.: On the synthesis of sta ble switching dy- namics to approximate limit cycles of nonlinear oscillator s. In: Proceedings of the 22nd International Conference on Informatics in Cont rol, Automation and Robotics - Volume 1: ICINCO. pp. 509–516. INSTICC, SciTe Press (2025). https://doi.org/10.5220/0013835000003982
-
[13]
In: European Control Conference
Hanke, N., Stursberg, O.: On the design of limit cycles of planar switching affine systems. In: European Control Conference. pp. 2251–2256 (2 023)
-
[14]
SIAM review 51(4), 747–764 (2009)
Higham, N.J.: The scaling and squaring method for the mat rix exponential revis- ited. SIAM review 51(4), 747–764 (2009)
2009
-
[15]
In: European Control Conf
Johansson, M., Rantzer, A.: Computation of piecewise qu adratic lyapunov func- tions for hybrid systems. In: European Control Conf. pp. 200 5–2010. IEEE (1997)
2010
-
[16]
Johansson, M.K.J.: Piecewise linear control systems: a computational approach, vol. 284. Springer (2003)
2003
-
[17]
IF AC-PapersOnLine49(1), 320–325 (2016)
Joshi, S.K., Sen, S., Kar, I.N.: Synchronization of coup led oscillator dynamics. IF AC-PapersOnLine49(1), 320–325 (2016)
2016
-
[18]
Mathematical and Computer Modelli ng 55(3-4), 505–516 (2012) 26 N
Kai, T., Masuda, R.: Limit cycle synthesis of multi-moda l and 2-dimensional piecewise affine systems. Mathematical and Computer Modelli ng 55(3-4), 505–516 (2012) 26 N. Hanke et al
2012
-
[19]
SIAM journal on matrix analysis and applications 19(3), 640–663 (1998)
Kenney, C.S., Laub, A.J.: A schur–fréchet algorithm for computing the logarithm and exponential of a matrix. SIAM journal on matrix analysis and applications 19(3), 640–663 (1998)
1998
-
[20]
Co mmunications in Nonlin- ear Science and Numerical Simulation 93, 105526 (2021)
Kudryashov, N.A.: The generalized duffing oscillator. Co mmunications in Nonlin- ear Science and Numerical Simulation 93, 105526 (2021)
2021
-
[21]
In: International symposium on mathematical problems in th eoretical physics
Kuramoto, Y.: Self-entrainment of a population of coupl ed non-linear oscillators. In: International symposium on mathematical problems in th eoretical physics. Ky- oto University, Japan. pp. 420–422. Springer (2005)
2005
-
[22]
Automatica 47(3), 608–613 (2011)
Lauer, F., Bloch, G., Vidal, R.: A continuous optimizati on framework for hybrid system identification. Automatica 47(3), 608–613 (2011)
2011
-
[23]
Nonlinearity 21(9), 2121 (2008)
Llibre, J., Ponce, E., Torres, F.: On the existence and un iqueness of limit cycles in liénard differential equations allowing discontinuitie s. Nonlinearity 21(9), 2121 (2008)
2008
-
[24]
part i: Simplest case in R2
Lum, R., Chua, L.O.: Global properties of continuous pie cewise linear vector fields. part i: Simplest case in R2. International journal of circuit theory and applications 19(3), 251–307 (1991)
1991
-
[25]
Miljkovic, A., Hanke, N., Liu, Z., Stursberg, O.: Refere nce tracking and state obser- vation for switching affine systems using piecewise quadrati c lyapunov functions. Proc. of IF AC Symposium on Nonlinear Control Systems p. TBD ( 2025)
2025
-
[26]
SIAM Journal on Applied Mathematics 50(6), 1645–1662 (1990)
Mirollo, R.E., Strogatz, S.H.: Synchronization of puls e-coupled biological oscilla- tors. SIAM Journal on Applied Mathematics 50(6), 1645–1662 (1990)
1990
-
[27]
European journal of control 13(2-3), 242–260 (2007)
Paoletti, S., Juloski, A.L., Ferrari-Trecate, G., Vida l, R.: Identification of hybrid systems a tutorial. European journal of control 13(2-3), 242–260 (2007)
2007
-
[28]
: On convergence prop- erties of piecewise affine systems
Pavlov, A., Pogromsky, A., Van De Wouw, N., Nijmeijer, H. : On convergence prop- erties of piecewise affine systems. International Journal of Control 80(8), 1233–1247 (2007)
2007
-
[29]
IEEE Transactions on Powe r Electronics 18(1), 301–308 (2003)
Peterchev, A.V., Sanders, S.R.: Quantization resoluti on and limit cycling in digi- tally controlled pwm converters. IEEE Transactions on Powe r Electronics 18(1), 301–308 (2003)
2003
-
[30]
IEEE Transactions on Circuits and Systems II: Express Briefs 55(9), 882–886 (2008)
Teplinsky, A., Feely, O.: Limit cycles in a mems oscillat or. IEEE Transactions on Circuits and Systems II: Express Briefs 55(9), 882–886 (2008)
2008
-
[31]
PLoS One 15(8), e0235930 (2020)
Werckenthin, A., Huber, J., Arnold, T., Koziarek, S., Pl ath, M.J., Plath, J.A., Stursberg, O., Herzel, H., Stengl, M.: Neither per, nor tim1 , nor cry2 alone are es- sential components of the molecular circadian clockwork in the madeira cockroach. PLoS One 15(8), e0235930 (2020)
2020
-
[32]
Automatica 44(11), 2909–2915 (2008)
van de Wouw, N., Pavlov, A.: Tracking and synchronisatio n for a class of pwa systems. Automatica 44(11), 2909–2915 (2008)
2008
-
[33]
The European Ph ysical Journal Special Topics 228(9), 1839–1854 (2019)
Xu, Y., Luo, A.C.: Frequency-amplitude characteristic s of periodic motions in a periodically forced van der pol oscillator. The European Ph ysical Journal Special Topics 228(9), 1839–1854 (2019)
2019
-
[34]
IEEE Trans
Zhu, Y., Zheng, W.X.: Multiple lyapunov functions analy sis approach for discrete- time-switched piecewise-affine systems under dwell-time co nstraints. IEEE Trans. on Automatic Control 65(5), 2177–2184 (2019)
2019
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.