Recognition: no theorem link
Modeling the Frictional Driving of a Gyroscope Casing by a Spinning Rotor
Pith reviewed 2026-05-11 01:21 UTC · model grok-4.3
The pith
Friction from a spinning rotor drives the gyroscope casing to rotate until air dissipation and touchpoint drag bring it to a stop.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The rotation of the gyroscope casing arises from frictional torque exerted by the spinning rotor at their contact surface; this rotation is subsequently opposed by air dissipation torque that scales with speed and by a touchpoint friction torque that acts at the support. Several functional forms for each torque are inserted into the coupled angular-velocity equations and fitted to experimental records. The resulting fits show that selected combinations of these models reproduce the primary rise-and-fall behavior of the casing speed, while certain residual discrepancies indicate that additional physical effects are still missing from the description.
What carries the argument
The set of speed-dependent torque functions (air-drag, rotor-casing friction, touchpoint friction) inserted into the differential equations for the two angular velocities and fitted to time-series data.
If this is right
- Some of the tested friction models reproduce the main acceleration and subsequent deceleration of the casing.
- Air dissipation and touchpoint friction together account for the gradual stopping of the rotation.
- The same torque modeling approach can be applied to improve rotation predictions for satellites that contain spinning rotors.
- Residual mismatches between model and data point to the need for additional terms to reach higher accuracy.
Where Pith is reading between the lines
- If the fitted torque forms remain valid at lower pressures, they could be used to estimate residual friction in space-based gyroscopes.
- The modeling strategy offers a template for predicting how rotor friction might induce slow drifts in other sealed rotating systems.
- Repeated experiments with varied rotor masses or surface materials would test whether the current torque expressions generalize or require new parameters.
Load-bearing premise
The chosen mathematical forms for the three friction torques are assumed to capture all dominant torques without large unmodeled contributions or parameters that change appreciably during a run.
What would settle it
New measurements of casing angular velocity at different rotor speeds or in a partial vacuum that systematically deviate from the predictions of the best-fit torque models by more than the reported experimental scatter.
Figures



read the original abstract
The rotation of the casing and rotor of a gyroscope is studied by considering frictional effects. Friction causes the casing to rotate, and over time, air dissipation and friction at the touchpoint gradually stop this rotation. Several models for air friction, friction between the rotor and casing, and friction at the touchpoint are analyzed. Fit results demonstrate that while some of these models can describe the primary motion, certain effects require further study to yield more precise results. These findings can aid in developing improved models for the rotation of satellites.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript examines the rotation of a gyroscope casing induced by friction from a spinning rotor. It develops and compares multiple phenomenological models for air dissipation, rotor-casing friction, and touchpoint friction, then reports fits to observed rotation data showing that some models reproduce the primary motion while additional effects must still be incorporated for higher precision. The work suggests these findings may help improve models of satellite rotation.
Significance. If the model fits prove robust upon detailed scrutiny, the paper supplies a practical set of friction terms for describing coupled rotor-casing dynamics in low-friction rotating systems. The deliberately modest central claim and explicit acknowledgment of remaining effects avoid overstatement, but the absence of reported error bars, data quality metrics, or out-of-sample validation keeps the immediate significance moderate.
major comments (2)
- [Abstract] Abstract: the assertion that 'fit results demonstrate that while some of these models can describe the primary motion' is presented without any mention of data quality, error bars, goodness-of-fit statistics, or whether the fits are predictive versus post-hoc. This omission prevents assessment of whether the models capture the underlying physics or simply reproduce the calibration data.
- [Abstract] Abstract: fitting several friction parameters (air dissipation, rotor-casing, touchpoint) to the same rotation time series carries an inherent risk of circularity; without independent validation data or out-of-sample tests, it is unclear whether the reported agreement constitutes genuine predictive power or merely an interpolation of the fitted curves.
minor comments (1)
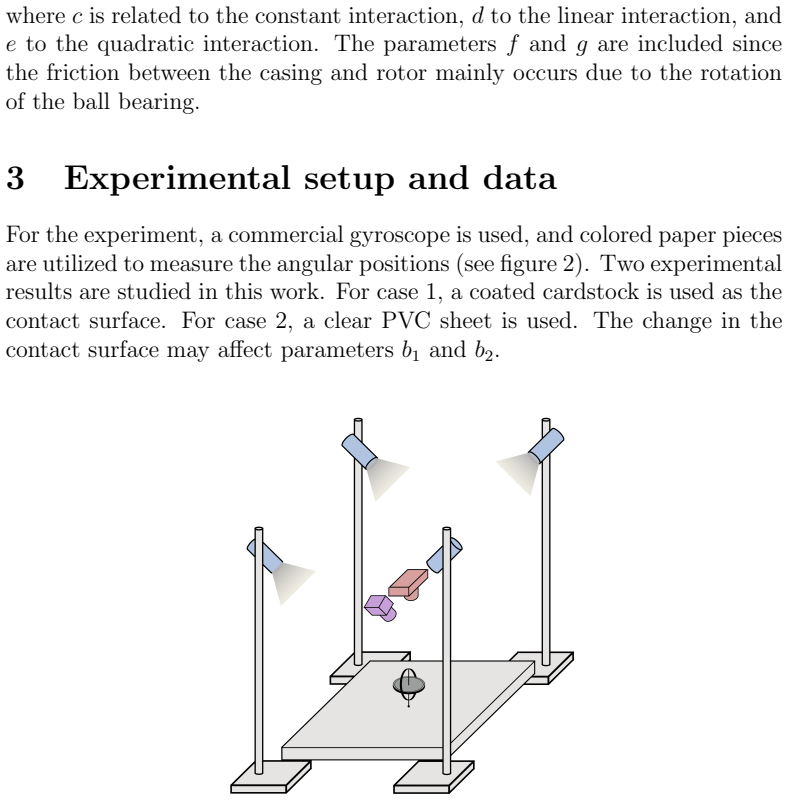
- [Abstract] The abstract would be strengthened by a concise statement of the experimental apparatus or data acquisition method so readers can judge the scope of the primary motion being modeled.
Simulated Author's Rebuttal
We thank the referee for the constructive comments. We address each point below and have made revisions to the abstract and discussion to clarify the nature of the fits and their limitations.
read point-by-point responses
-
Referee: [Abstract] Abstract: the assertion that 'fit results demonstrate that while some of these models can describe the primary motion' is presented without any mention of data quality, error bars, goodness-of-fit statistics, or whether the fits are predictive versus post-hoc. This omission prevents assessment of whether the models capture the underlying physics or simply reproduce the calibration data.
Authors: We agree the abstract was too terse on this point. The revised abstract now states that the models are fitted to the experimental rotation time series and that agreement is judged by reproduction of the primary observed motion. The main text describes the fitting procedure; quantitative error bars and formal goodness-of-fit statistics are not emphasized because the models are phenomenological and the goal is to distinguish which terms capture the dominant dynamics rather than to perform precise parameter estimation. revision: yes
-
Referee: [Abstract] Abstract: fitting several friction parameters (air dissipation, rotor-casing, touchpoint) to the same rotation time series carries an inherent risk of circularity; without independent validation data or out-of-sample tests, it is unclear whether the reported agreement constitutes genuine predictive power or merely an interpolation of the fitted curves.
Authors: We acknowledge the inherent limitation of fitting multiple parameters to a single time series. The models are phenomenological tools for identifying which friction mechanisms account for the main features of the data. We have added text in the abstract and discussion clarifying that the reported agreement is post-hoc on the available dataset and should be regarded as a starting point for model refinement rather than a validated prediction. Out-of-sample tests would require additional independent runs, which lie beyond the scope of the present study. revision: partial
Circularity Check
No significant circularity detected
full rationale
The paper develops several phenomenological models for air dissipation, rotor-casing friction, and touchpoint friction, then fits them to observed casing rotation data. It reports that some models describe the primary motion while noting that additional effects need further study. This is explicit parameter fitting and model comparison; the abstract ties conclusions directly to 'fit results' without presenting the fits as independent out-of-sample predictions or first-principles derivations. No equations reduce to their inputs by construction, no load-bearing self-citations are invoked, and no ansatz is smuggled via prior work. The modest central claim remains self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
Reference graph
Works this paper leans on
-
[1]
Jellett, A treatise on the theory of friction, (Hodges, Foster and co., Dublin, 1872) 181-187
J.H. Jellett, A treatise on the theory of friction, (Hodges, Foster and co., Dublin, 1872) 181-187
-
[2]
A.D. Fokker, The rising top, experimental evidence and theory,Physica 8(1941) 591-596https://doi.org/10.1016/S0031-8914(41)80039-1
-
[3]
V. Tanrıverdi, Revisiting dissipative motion of a spinning heavy sym- metric top and the rise of the top by friction,Rev. Mex. Fis.69(2023) 021403https://doi.org/10.31349/revmexfis.69.021403
- [4]
-
[5]
R. Parks and L. Maunder, Damped Free Oscillations of a Gyroscopic SystemNature190(1961) 710https://doi.org/10.1038/190710a0
-
[6]
P. Sethna and M. Balachandra, Transients in high spin gyroscopic sys- temsJ. Appl. Mech.41(1974) 787-792https://doi.org/10.1115/1. 3423389
work page doi:10.1115/1 1974
-
[7]
Z.M. Ge and M.H. Wu, On the stability of motion of several types of heavy symmetric gyroscopes with damping torquesTrans. Can. Soc. Mech. Eng. or CSME Trans.11(1987) 243-247https://doi.org/10. 1139/tcsme-1987-0027
work page 1987
-
[8]
J.M. Longuski and P. Tsiotras, Analytical Solutions for a Spinning Rigid Body Subject to Time-Varying Body-Fixed Torques, Part I: Constant Axial TorqueJ. Appl. Mech.60(1993) 970-975https://doi.org/10. 1115/1.2901010 18
work page 1993
-
[9]
A.V. Sorokin, V.V. Yaremenko, Control Moment Gyroscopes for Spacecraft Attitude Control Systems: History of Development,Gy- roscopy and Navigation13(2022) 53-58https://doi.org/10.1134/ S2075108722010060
work page 2022
-
[10]
P.R. Dahl, A solid friction model, Technical Report TOR-0158(3107- 18)-1, (The Aerospace Corporation, El Segundo, 1968)https://apps. dtic.mil/sti/citations/ADA041920
work page 1968
-
[11]
C. Canudas de Wit, H. Olsson, K.J. ˚Astr¨ om, P. Lischinsky, A new model for control of systems with friction,IEEE Trans. Autom. Control40 (1995) 419-425https://doi.org/10.1109/9.376053
-
[12]
K.J. ˚Astr¨ om, C. Canudas-de-Wit, Revisiting the LuGre friction model, IEEE Control Syst. Mag.28(2008) 101-114https://doi.org/10. 1109/MCS.2008.929425
-
[13]
C. Canudas-de-Wit, P. Lischinsky, Adaptive friction compensation with dynamic friction model,IF AC Proc.29(1996) 2078-2083https://doi. org/10.1016/S1474-6670(17)57978-1
-
[14]
S. Pan, F.Z. Xu, L. Chen, W. Huang, J. Wu, Coupled dynamic modeling and analysis of the single gimbal control moment gyroscope driven by ultrasonic motor,IEEE Access8(2020) 146233-146247https://doi. org/10.1109/ACCESS.2020.3012694
-
[15]
D.E. Hill, Dynamics and control of spinning spacecraft using translat- ing masses with friction compensation,J. Spacecr. Rockets54(2017) https://doi.org/10.2514/1.A33839
-
[16]
Z. Gai, J. Wang, Research on dynamic seal friction torque compensation for a low-slow-small UAV tracking system,IEEE Access11(2023) 6404- 6412https://doi.org/10.1109/ACCESS.2023.3237264
-
[17]
K.V. Sancak, Z.Y. Bayraktaroglu, Observer-based friction compensation in heavy-duty parallel robot control,J. Mech. Sci. Technol.35(2021) 3693-3704https://doi.org/10.1007/s12206-021-0738-2
-
[18]
M. Iwasaki, T. Shibata, N. Matsui, Disturbance-observer-based nonlin- ear friction compensation in table drive system,IEEE/ASME Trans. Mechatronics4(1999) 3-8https://doi.org/10.1109/3516.752078 19
-
[19]
H. Olsson, K.J. ˚Astr¨ om, C. Canudas de Wit, M. G¨ afvert, P. Lischinsky, Friction models and friction compensation,Eur. J. Control4(1998) 176-195https://doi.org/10.1016/S0947-3580(98)70113-X
- [20]
- [21]
-
[22]
Tanrıverdi, Dissipative motion of a spinning heavy symmetric top,Eur
V. Tanrıverdi, Dissipative motion of a spinning heavy symmetric top,Eur. J. Phys.41(2020) 055001https://doi.org/10.1088/ 1361-6404/ab9930
work page 2020
-
[23]
C. Gurrisi, R. Seidel, S. Dickerson, S. Didziulis, P. Frantz, K. Fergu- son, Space station control moment gyroscope lessons learned,Proc. 40th Aerospace Mechanisms Symp.(2010) 161-174https://ntrs.nasa.gov/ citations/20100021932 20
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.