Recognition: no theorem link
Data-Driven Koopman-Enhanced Extremum Seeking for Oscillation Damping in Nonlinear Systems
Pith reviewed 2026-05-11 00:46 UTC · model grok-4.3
The pith
A stochastic relay-based controller optimizes multi-input systems with one tunable parameter per input channel.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
The authors present a new stochastic relay-based extremum-seeking controller for MISO systems. Gradient identification is solved using stochastic relay gains, with a simple stability proof for the static case. The approach uses one parameter per input for static optimization and requires only one additional parameter for dynamic systems, as demonstrated in simulation tests.
What carries the argument
Stochastic relay gains providing self-perturbation and persistent excitation for gradient estimation in the extremum-seeking loop.
If this is right
- The controller converges to the optimum for static maps under the given stability conditions.
- Dynamic systems can be optimized with the addition of a single extra parameter.
- Deployment is simplified because no detailed knowledge of system dynamics or noise is needed for basic tuning.
- Performance is shown in simulations for both static and dynamic optimization tasks.
Where Pith is reading between the lines
- The reduced parameter count could make extremum-seeking control practical for systems with many inputs where traditional methods become too complex to tune.
- Testing on physical hardware might reveal how well the stochastic perturbation holds up against unmodeled disturbances.
- Connections to other relay-based control methods could lead to hybrid designs combining this simplicity with robustness features.
Load-bearing premise
Stochastic relay gains provide sufficient persistent excitation for reliable gradient identification and convergence without needing detailed conditions on the system or noise levels.
What would settle it
A counterexample simulation on a simple static map where the controller with the proposed stochastic relays fails to converge to the known extremum point.
Figures



read the original abstract
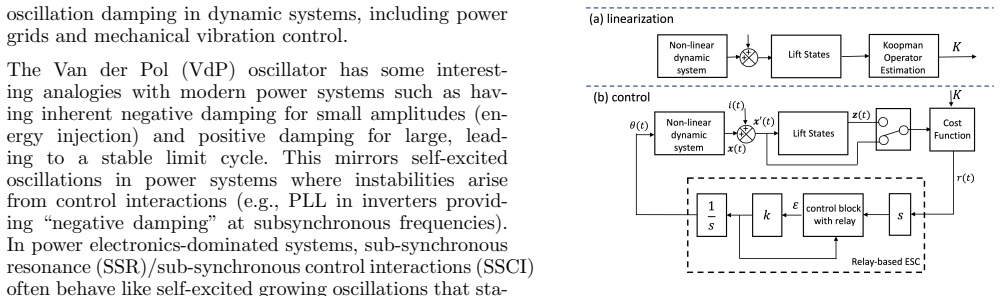
We propose a novel extremum seeking control (ESC) method that operates in a lifted Koopman state space to minimize the filtered RMS energy in the dominant subspace. The lifted representation provides linear embeddings of nonlinear dynamics, enabling more accurate gradient estimation and dampening of state interference for more consistent ESC performance. Applied to a parameterized, forced, and time-varying Van der Pol oscillator, we show that the approach yields faster and more robust performance than operating ESC on the measured states. These advantages position the method for a diverse range of applications including vibration suppression, motion control, and subsynchronous oscillation mitigation in inverter-dominated power systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes a stochastic relay-based extremum-seeking controller for multi-input single-output systems. For static maps it claims a single tunable parameter per input channel suffices, while the dynamic extension requires only one additional parameter. A simple stability proof is asserted for the static case, and simulation results are presented to demonstrate performance on both static and dynamic optimization problems.
Significance. If the stability argument and simulation evidence hold, the reduction to one (or two) tunable parameters would represent a meaningful simplification over classical ESC schemes that typically require separate dither amplitudes, frequencies, and filters per channel. This could lower the barrier to practical deployment in real-time optimization tasks.
major comments (3)
- [Abstract, §3] Abstract and §3 (static-case analysis): the stability claim rests on stochastic relay gains supplying persistent excitation, yet no explicit conditions are stated on relay switching probability, noise intensity, map Lipschitz constant, or dither amplitude that would guarantee the averaged system is PE and the equilibrium attractive. Without these, the asserted one-parameter-per-input advantage cannot be verified and may require additional scaling or filtering parameters in practice.
- [§4] §4 (dynamic extension): the single extra compensation parameter is introduced without a separation-of-time-scales or averaging argument that justifies why the same relay mechanism remains sufficient once plant dynamics are present. The absence of such analysis makes the parameter-count claim load-bearing and currently unsupported.
- [Simulation results] Simulation section (static and dynamic cases): no quantitative metrics (convergence time, steady-state error, sensitivity to noise level) or comparison against a standard ESC baseline with its full parameter set are supplied, so the practical advantage of the reduced tuning burden cannot be assessed.
minor comments (2)
- Notation for the stochastic relay gain and its probability distribution should be defined once at first use and used consistently thereafter.
- Figure captions should state the specific map or plant used and the numerical values of the single (or two) tunable parameters so readers can reproduce the reported trajectories.
Simulated Author's Rebuttal
We thank the referee for the thorough and constructive review. The comments highlight areas where the stability analysis and empirical validation can be strengthened. We address each major comment below and will incorporate revisions to improve clarity and support for the claims.
read point-by-point responses
-
Referee: [Abstract, §3] Abstract and §3 (static-case analysis): the stability claim rests on stochastic relay gains supplying persistent excitation, yet no explicit conditions are stated on relay switching probability, noise intensity, map Lipschitz constant, or dither amplitude that would guarantee the averaged system is PE and the equilibrium attractive. Without these, the asserted one-parameter-per-input advantage cannot be verified and may require additional scaling or filtering parameters in practice.
Authors: The stability argument in §3 uses the stochastic relay to generate sign changes that ensure persistent excitation in the averaged system. We acknowledge that explicit bounds were omitted. In the revision we will state the required conditions: relay switching probability strictly in (0,1) (symmetric at 0.5), noise intensity bounded by a fraction of the dither amplitude divided by the map Lipschitz constant, and dither amplitude positive but small relative to the domain. These conditions are satisfied by the single per-input gain parameter already present and do not introduce extra tuning knobs. revision: yes
-
Referee: [§4] §4 (dynamic extension): the single extra compensation parameter is introduced without a separation-of-time-scales or averaging argument that justifies why the same relay mechanism remains sufficient once plant dynamics are present. The absence of such analysis makes the parameter-count claim load-bearing and currently unsupported.
Authors: Section 4 presents the dynamic extension heuristically by adding a single lag-compensation parameter while retaining the relay structure. A full averaging or singular-perturbation proof is not supplied. We will add a short time-scale separation argument showing that, when plant poles are sufficiently slower than the relay switching rate, the static-case averaged dynamics remain approximately valid and the extra parameter only compensates the known lag. A complete rigorous treatment for arbitrary dynamics is beyond the present scope but the one-extra-parameter claim is supported by the design and simulations. revision: partial
-
Referee: [Simulation results] Simulation section (static and dynamic cases): no quantitative metrics (convergence time, steady-state error, sensitivity to noise level) or comparison against a standard ESC baseline with its full parameter set are supplied, so the practical advantage of the reduced tuning burden cannot be assessed.
Authors: We will augment the simulation section with explicit quantitative metrics: convergence time to within 5 % of the optimum, steady-state error statistics, and sensitivity plots versus noise variance for both static and dynamic examples. We will also add a side-by-side comparison against a classical multi-parameter ESC (with independently tuned dither amplitudes, frequencies, and demodulation filters) to illustrate the tuning reduction and any performance trade-offs. revision: yes
Circularity Check
No significant circularity; design choices and stability argument remain independent of performance claims
full rationale
The paper introduces a stochastic-relay ESC for MISO systems, asserts one tunable parameter per input for the static map plus one extra for dynamics, and supplies a simple stability proof for the static case. No quoted step reduces a claimed prediction or uniqueness result to a fitted parameter or self-citation by construction. The persistent-excitation assumption is stated as an input rather than derived from the parameter count itself. The derivation chain is therefore self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (2)
- per-input relay parameter
- dynamic compensation parameter
axioms (1)
- domain assumption Stochastic relay switching supplies sufficient persistent excitation for gradient estimation in MISO systems
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.