Recognition: no theorem link
From Pixels to Primitives: Scene Change Detection in 3D Gaussian Splatting
Pith reviewed 2026-05-12 04:27 UTC · model grok-4.3
The pith
Scene changes can be detected directly from 3D Gaussian primitive attributes without rendering to images.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
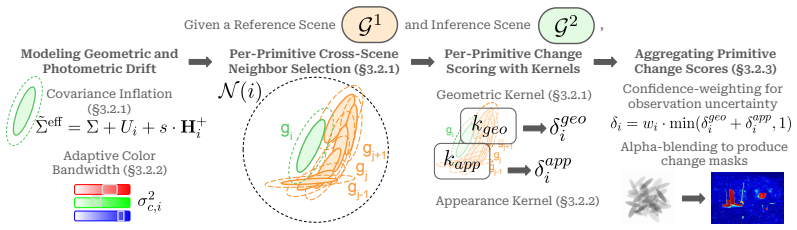
We provide direct evidence that native primitive attributes alone—position, anisotropic covariance, and color—carry sufficient signal for scene change detection. We address the under-constrained nature of independent Gaussian optimizations with anisotropic models of geometric and photometric drift, complemented by a per-primitive observability term. Our method, GS-DIFF, yields change maps that are multi-view consistent by construction and scores geometric and appearance changes separately without supervision or external models.
What carries the argument
Anisotropic geometric and photometric drift models together with a per-primitive observability term that accounts for how well each Gaussian is constrained by the input views.
Load-bearing premise
The under-constrained nature of independent Gaussian optimizations can be adequately captured by the introduced anisotropic geometric and photometric drift models together with the per-primitive observability term, without introducing systematic bias in change scoring.
What would settle it
Optimizing two separate 3D Gaussian splats on images of an identical static scene and checking whether the method reports near-zero change scores or still flags spurious differences.
Figures




read the original abstract
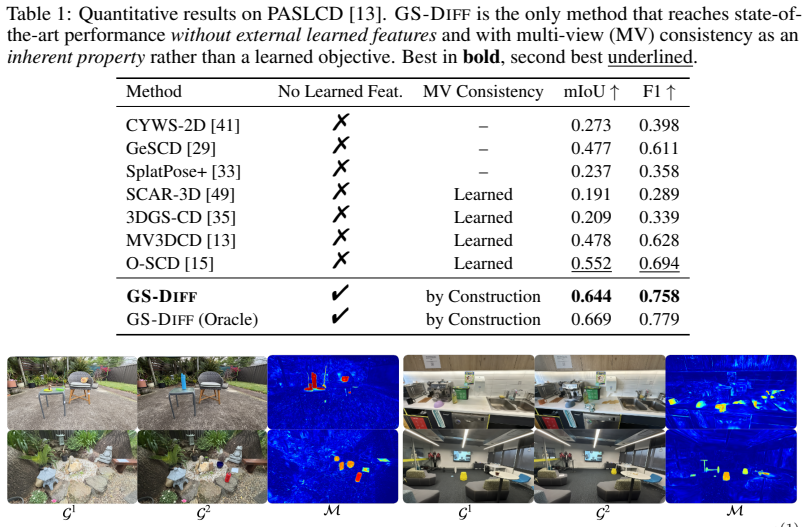
Scene change detection methods built on Gaussian splatting universally follow a render-then-compare paradigm: the pre-change scene is rendered into 2D and compared against post-change images via pixel or feature residuals. This change detection problem with Gaussian Splatting has been treated as a question about pixels; we treat it as a question about primitives. We provide direct evidence that native primitive attributes alone -- position, anisotropic covariance, and color -- carry sufficient signal for scene change detection. What makes primitive-space comparison hard is the under-constrained nature of Gaussian splatting representation: independent optimizations yield primitive solutions whose count, positions, shapes, and colors differ even where nothing has changed. We address this challenge with anisotropic models of geometric and photometric drift, complemented by a per-primitive observability term that reflects the extent to which each Gaussian is constrained by the camera geometry. Operating directly on primitives gives our method, GD-DIFF, two properties that distinguish it from render-then-compare methods. First, change maps are multi-view consistent by construction, where prior work had to learn this through an additional optimization objective. Second, geometric and appearance changes are scored separately, identifying not just where but what kind of change occurred, distinguishing structural changes (e.g., an added object) from surface-level ones (e.g., a color change) without supervision or external model dependencies. On real-world benchmarks, GS-DIFF surpasses the prior state-of-the-art approach by $\sim$17% in mean Intersection over Union.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript introduces GS-DIFF (also referred to as GD-DIFF), a scene change detection method that operates directly on 3D Gaussian Splatting primitives rather than rendered 2D images. It claims that native attributes—position, anisotropic covariance, and color—carry sufficient signal for detecting changes once the under-constrained nature of independent per-scene optimizations is addressed via anisotropic models of geometric and photometric drift plus a per-primitive observability term derived from camera geometry. This yields multi-view consistent change maps by construction and allows separate scoring of geometric versus appearance changes without supervision. On real-world benchmarks the method reports an approximately 17% gain in mean Intersection over Union over prior render-then-compare state-of-the-art approaches.
Significance. If the empirical claims and modeling assumptions hold, the work is significant because it shifts scene change detection from pixel-space residuals to direct primitive-space comparison, providing inherent multi-view consistency without an auxiliary optimization objective and enabling unsupervised distinction between structural and surface-level changes. The explicit modeling of optimization-induced drift and observability is a constructive contribution that could improve interpretability and efficiency in downstream tasks such as robotics and augmented reality. The paper also supplies falsifiable predictions through its separate geometric and photometric change scores.
major comments (3)
- [Abstract] Abstract: The central empirical claim that GS-DIFF surpasses prior SOTA by ∼17% mIoU is load-bearing for the contribution, yet the abstract (and by extension the experimental evaluation) provides no details on the specific baselines, error bars, data splits, or ablation studies isolating the anisotropic drift models and observability term. Without these, it is impossible to verify whether the reported gains arise from the primitive-space formulation or from other factors.
- [Method] Method (drift and observability models): The anisotropic geometric/photometric drift models and per-primitive observability term are introduced to neutralize variability from independent Gaussian optimizations, but no theoretical bound, false-positive analysis on static scenes, or validation against misspecification of the drift distributions is supplied. If these models correlate with scene structure rather than purely with optimization artifacts, change scores will be systematically biased even in the absence of real change.
- [Experiments] Experimental evaluation: The claim that native primitive attributes alone suffice for change detection rests on the assumption that the introduced drift and observability components fully resolve non-corresponding primitive sets; however, the manuscript does not report ablations removing these components or quantitative checks that the observability term does not inadvertently encode actual scene geometry.
minor comments (2)
- [Abstract] The method is referred to as both GD-DIFF and GS-DIFF; a single consistent name should be used throughout.
- [Method] The computation of the per-primitive observability term from camera geometry should be stated with an explicit equation or pseudocode for reproducibility.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. We address each major comment point by point below, providing clarifications and committing to revisions that strengthen the manuscript without altering its core claims.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central empirical claim that GS-DIFF surpasses prior SOTA by ∼17% mIoU is load-bearing for the contribution, yet the abstract (and by extension the experimental evaluation) provides no details on the specific baselines, error bars, data splits, or ablation studies isolating the anisotropic drift models and observability term. Without these, it is impossible to verify whether the reported gains arise from the primitive-space formulation or from other factors.
Authors: We agree that the abstract is concise and would benefit from more context for immediate verifiability. The specific baselines (render-then-compare SOTA methods), data splits, error bars over multiple runs, and ablation results isolating the drift and observability components are fully detailed in Section 4 and the supplementary material. We will revise the abstract to explicitly name the primary baseline and reference the evaluation protocol, while noting that gains are measured in mIoU with standard deviations. This will clarify that improvements derive from the primitive-space formulation with the proposed drift and observability modeling. revision: yes
-
Referee: [Method] Method (drift and observability models): The anisotropic geometric/photometric drift models and per-primitive observability term are introduced to neutralize variability from independent Gaussian optimizations, but no theoretical bound, false-positive analysis on static scenes, or validation against misspecification of the drift distributions is supplied. If these models correlate with scene structure rather than purely with optimization artifacts, change scores will be systematically biased even in the absence of real change.
Authors: The drift models are empirically derived from observed variability in independent optimizations of identical static scenes (Section 3.2), and the observability term is computed directly from camera geometry and Gaussian projection. While we do not derive a formal theoretical bound (due to the non-convex nature of Gaussian Splatting optimization), we include empirical false-positive analysis on static scenes demonstrating low rates. To address potential correlation with scene structure, we will add a new subsection with quantitative sensitivity analysis and visualizations showing that drift parameters align with optimization degrees of freedom rather than scene content. Misspecification validation via parameter perturbation will also be included. revision: partial
-
Referee: [Experiments] Experimental evaluation: The claim that native primitive attributes alone suffice for change detection rests on the assumption that the introduced drift and observability components fully resolve non-corresponding primitive sets; however, the manuscript does not report ablations removing these components or quantitative checks that the observability term does not inadvertently encode actual scene geometry.
Authors: We concur that explicit ablations would provide stronger isolation of each component's contribution. The current results demonstrate the overall performance advantage, but direct removal of drift modeling or the observability term is not tabulated in the main text. In the revision, we will add these ablations to Section 4, reporting mIoU drops for each variant, along with quantitative checks (e.g., Pearson correlation between observability scores and geometric features like surface normals) confirming that the term primarily encodes visibility constraints from camera geometry rather than scene structure itself. revision: yes
Circularity Check
No significant circularity; new drift models and observability term introduced independently of target labels.
full rationale
The paper's central derivation introduces anisotropic models of geometric and photometric drift plus a per-primitive observability term explicitly to handle under-constrained independent optimizations in Gaussian splatting. These components are motivated directly from the stated problem of non-corresponding primitives across optimizations and are not shown to be fitted from or equivalent to the downstream change detection labels. No self-citation chains, uniqueness theorems from prior author work, or renamings of known results are invoked as load-bearing steps in the provided text. The performance claim (∼17% mIoU gain) is presented as an empirical outcome on benchmarks rather than a mathematical reduction by construction. The derivation chain remains self-contained with independent modeling choices.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Independent optimizations of Gaussian Splatting yield primitive solutions with differing count, positions, shapes, and colors even for unchanged scenes.
invented entities (2)
-
anisotropic models of geometric and photometric drift
no independent evidence
-
per-primitive observability term
no independent evidence
Reference graph
Works this paper leans on
-
[1]
CL-Splats: Continual learning of Gaussian splatting with local optimization
Jan Ackermann, Jonas Kulhanek, Shengqu Cai, Xu Haofei, Marc Pollefeys, Gordon Wetzstein, Leonidas Guibas, and Songyou Peng. CL-Splats: Continual learning of Gaussian splatting with local optimization. InIEEE/CVF International Conference on Computer Vision, 2025
work page 2025
-
[2]
Street-view change detection with deconvolutional networks.Autonomous Robots, 42(7):1301–1322, 2018
Pablo F Alcantarilla, Simon Stent, German Ros, Roberto Arroyo, and Riccardo Gherardi. Street-view change detection with deconvolutional networks.Autonomous Robots, 42(7):1301–1322, 2018
work page 2018
-
[3]
EMPLACE: Self-supervised urban scene change detection
Tim Alpherts, Sennay Ghebreab, and Nanne van Noord. EMPLACE: Self-supervised urban scene change detection. InAAAI Conference on Artificial Intelligence, pages 1737–1745, 2025
work page 2025
-
[4]
Kay Henning Brodersen, Cheng Soon Ong, Klaas Enno Stephan, and Joachim M. Buhmann. The balanced accuracy and its posterior distribution. In20th International Conference on Pattern Recognition (ICPR), pages 3121–3124. IEEE, 2010
work page 2010
-
[5]
Danpeng Chen, Hai Li, Weicai Ye, Yifan Wang, Weijian Xie, Shangjin Zhai, Nan Wang, Haomin Liu, Hujun Bao, and Guofeng Zhang. PGSR: Planar-based Gaussian splatting for efficient and high-fidelity surface reconstruction.IEEE Transactions on Visualization and Computer Graphics, 31(9):6100–6111, 2024
work page 2024
-
[6]
GI-GS: Global illumination decomposition on gaussian splatting for inverse rendering
HONGZE CHEN, Zehong Lin, and Jun Zhang. GI-GS: Global illumination decomposition on gaussian splatting for inverse rendering. InThe Thirteenth International Conference on Learning Representations, 2025
work page 2025
-
[7]
Zero-shot scene change detection
Kyusik Cho, Dong Yeop Kim, and Euntai Kim. Zero-shot scene change detection. InAAAI Conference on Artificial Intelligence, pages 2509–2517, 2025
work page 2025
-
[8]
Gaussian heritage: 3D digitization of cultural heritage with integrated object segmentation
Mahtab Dahaghin, Myrna Castillo, Kourosh Riahidehkordi, Matteo Toso, and Alessio Del Bue. Gaussian heritage: 3D digitization of cultural heritage with integrated object segmentation. InEuropean Conference on Computer Vision Workshops, 2024
work page 2024
-
[9]
Fully convolutional siamese networks for change detection
Rodrigo Caye Daudt, Bertr Le Saux, and Alexandre Boulch. Fully convolutional siamese networks for change detection. InIEEE International Conference on Image Processing, pages 4063–4067, 2018
work page 2018
-
[10]
Iris de Gélis, Sébastien Lefèvre, and Thomas Corpetti. Siamese KPConv: 3D multiple change detection from raw point clouds using deep learning.ISPRS Journal of Photogrammetry and Remote Sensing, 197: 274–291, 2023
work page 2023
-
[11]
GOLDILOCS: General object-level detection and labeling of changes in scenes
Almog Friedlander, Ariel Shamir, and Ohad Fried. GOLDILOCS: General object-level detection and labeling of changes in scenes. InInternational Conference on Learning Representations, 2026
work page 2026
-
[12]
Towards generalizing to unseen domains with few labels
Chamuditha Jayanga Galappaththige, Sanoojan Baliah, Malitha Gunawardhana, and Muhammad Haris Khan. Towards generalizing to unseen domains with few labels. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 23691–23700, 2024
work page 2024
-
[13]
Dansereau, Niko Suenderhauf, and Dimity Miller
Chamuditha Jayanga Galappaththige, Jason Lai, Lloyd Windrim, Donald G. Dansereau, Niko Suenderhauf, and Dimity Miller. Multi-view pose-agnostic change localization with zero labels. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2025
work page 2025
-
[14]
Chamuditha Jayanga Galappaththige, Thomas Gottwald, Peter Stehr, Edgar Heinert, Niko Suenderhauf, Dimity Miller, and Matthias Rottmann. Predictive photometric uncertainty in gaussian splatting for novel view synthesis.arXiv preprint arXiv:2603.22786, 2026
-
[15]
Dansereau, Niko Suenderhauf, and Dimity Miller
Chamuditha Jayanga Galappaththige, Jason Lai, Lloyd Windrim, Donald G. Dansereau, Niko Suenderhauf, and Dimity Miller. Changes in real time: Online scene change detection with multi-view fusion. In IEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026
work page 2026
-
[16]
Relightable 3d gaussians: Realistic point cloud relighting with brdf decomposition and ray tracing
Jian Gao, Chun Gu, Youtian Lin, Zhihao Li, Hao Zhu, Xun Cao, Li Zhang, and Yao Yao. Relightable 3d gaussians: Realistic point cloud relighting with brdf decomposition and ray tracing. InEuropean Conference on Computer Vision, pages 73–89. Springer, 2024. 10
work page 2024
-
[17]
Kyle Gao, Dening Lu, Liangzhi Li, Nan Chen, Hongjie He, Linlin Xu, and Jonathan Li. Digital build- ings analysis: 3D modeling, GIS integration, and visual descriptions using Gaussian splatting, Chat- GPT/DeepSeek, and Google maps platform.IEEE Geoscience and Remote Sensing Letters, 2025
work page 2025
-
[18]
Joachim Gehrung, Marcus Hebel, Michael Arens, and Uwe Stilla. A fast voxel-based indicator for change detection using low resolution octrees.ISPRS Annals of the Photogrammetry, Remote Sensing and Spatial Information Sciences, 4:357–364, 2019
work page 2019
-
[19]
Daniel Girardeau-Montaut, Michel Roux, Raphaël Marc, and Guillaume Thibault. Change detection on point cloud data acquired with a ground laser scanner.International Archives of Photogrammetry, Remote Sensing and Spatial Information Sciences, 36, 2005
work page 2005
-
[20]
Antoine Guédon and Vincent Lepetit. Sugar: Surface-aligned gaussian splatting for efficient 3d mesh reconstruction and high-quality mesh rendering. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 5354–5363, 2024
work page 2024
-
[21]
arXiv preprint arXiv:2007.01434 , year=
Ishaan Gulrajani and David Lopez-Paz. In search of lost domain generalization.arXiv preprint arXiv:2007.01434, 2020
-
[22]
Cambridge University Press, New York, NY , USA, 2 edition, 2003
Richard Hartley and Andrew Zisserman.Multiple View Geometry in Computer Vision. Cambridge University Press, New York, NY , USA, 2 edition, 2003
work page 2003
-
[23]
2d gaussian splatting for geometrically accurate radiance fields
Binbin Huang, Zehao Yu, Anpei Chen, Andreas Geiger, and Shenghua Gao. 2d gaussian splatting for geometrically accurate radiance fields. InSIGGRAPH 2024 Conference Papers. Association for Computing Machinery, 2024
work page 2024
-
[24]
Eyke Hüllermeier and Willem Waegeman. Aleatoric and epistemic uncertainty in machine learning: An introduction to concepts and methods.Machine Learning, 110(3):457–506, 2021
work page 2021
-
[25]
Gaussian difference: Find any change instance in 3D scenes
Binbin Jiang, Rui Huang, Qingyi Zhao, and Yuxiang Zhang. Gaussian difference: Find any change instance in 3D scenes. InIEEE International Conference on Acoustics, Speech, and Signal Processing, pages 1–5, 2025
work page 2025
-
[26]
ZeroSCD: Zero-shot street scene change detection
Shyam Sundar Kannan and Byung-Cheol Min. ZeroSCD: Zero-shot street scene change detection. In IEEE International Conference on Robotics and Automation, pages 4665–4671, 2025
work page 2025
-
[27]
Alex Kendall and Yarin Gal. What uncertainties do we need in Bayesian deep learning for computer vision? InAdvances in Neural Information Processing Systems, 2017
work page 2017
-
[28]
Bernhard Kerbl, Georgios Kopanas, Thomas Leimkühler, and George Drettakis. 3D Gaussian splatting for real-time radiance field rendering.ACM Transactions on Graphics, 42(4):139–1, 2023
work page 2023
-
[29]
Towards generalizable scene change detection
Jae-Woo Kim and Ue-Hwan Kim. Towards generalizable scene change detection. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 24463–24473, 2025
work page 2025
-
[30]
SplatPose & detect: Pose- agnostic 3D anomaly detection
Mathis Kruse, Marco Rudolph, Dominik Woiwode, and Bodo Rosenhahn. SplatPose & detect: Pose- agnostic 3D anomaly detection. InIEEE/CVF Conference on Computer Vision and Pattern Recognition Workshops, pages 3950–3960, 2024
work page 2024
-
[31]
Dimitri Lague, Nicolas Brodu, and Jérôme Leroux. Accurate 3D comparison of complex topography with terrestrial laser scanner: Application to the Rangitikei canyon (n-z).ISPRS Journal of Photogrammetry and Remote Sensing, 82:10–26, 2013
work page 2013
-
[32]
Robust scene change detection using visual foundation models and cross-attention mechanisms
Chun-Jung Lin, Sourav Garg, Tat-Jun Chin, and Feras Dayoub. Robust scene change detection using visual foundation models and cross-attention mechanisms. InIEEE International Conference on Robotics and Automation, pages 8337–8343, 2025
work page 2025
-
[33]
SplatPose+: Real-time image-based pose-agnostic 3D anomaly detection
Yizhe Liu, Yan Song Hu, Yuhao Chen, and John Zelek. SplatPose+: Real-time image-based pose-agnostic 3D anomaly detection. InEuropean Conference on Computer Vision Workshops, pages 378–391, 2024
work page 2024
-
[34]
3D VSG: Long-term semantic scene change prediction through 3D variable scene graphs
Samuel Looper, Javier Rodriguez-Puigvert, Roland Siegwart, Cesar Cadena, and Lukas Schmid. 3D VSG: Long-term semantic scene change prediction through 3D variable scene graphs. InIEEE International Conference on Robotics and Automation, pages 8179–8186, 2023
work page 2023
-
[35]
Ziqi Lu, Jianbo Ye, and John Leonard. 3DGS-CD: 3D Gaussian splatting-based change detection for physical object rearrangement.IEEE Robotics and Automation Letters, 2025
work page 2025
-
[36]
Hidenobu Matsuki, Riku Murai, Paul HJ Kelly, and Andrew J Davison. Gaussian splatting SLAM. In IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 18039–18048, 2024. 11
work page 2024
-
[37]
DINOv2: Learning Robust Visual Features without Supervision
Maxime Oquab, Timothée Darcet, Théo Moutakanni, Huy V o, Marc Szafraniec, Vasil Khalidov, Pierre Fernandez, Daniel Haziza, Francisco Massa, Alaaeldin El-Nouby, et al. DINOv2: Learning robust visual features without supervision.arXiv preprint arXiv:2304.07193, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[38]
3d change localization and captioning from dynamic scans of indoor scenes
Yue Qiu, Shintaro Yamamoto, Ryosuke Yamada, Ryota Suzuki, Hirokatsu Kataoka, Kenji Iwata, and Yutaka Satoh. 3d change localization and captioning from dynamic scans of indoor scenes. InIEEE/CVF Winter Conference on Applications of Computer Vision, pages 1176–1185, 2023
work page 2023
-
[39]
SAM 2: Segment Anything in Images and Videos
Nikhila Ravi, Valentin Gabeur, Yuan-Ting Hu, Ronghang Hu, Chaitanya Ryali, Tengyu Ma, Haitham Khedr, Roman Rädle, Chloe Rolland, Laura Gustafson, et al. SAM 2: Segment anything in images and videos.arXiv preprint arXiv:2408.00714, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[40]
FastGS: Training 3D Gaussian splatting in 100 seconds
Shiwei Ren, Tianci Wen, Yongchun Fang, and Biao Lu. FastGS: Training 3D Gaussian splatting in 100 seconds. InIEEE/CVF Conference on Computer Vision and Pattern Recognition, 2026
work page 2026
-
[41]
Ragav Sachdeva and Andrew Zisserman. The change you want to see. InIEEE/CVF Winter Conference on Applications of Computer Vision, pages 3993–4002, 2023
work page 2023
-
[42]
The change you want to see (now in 3D)
Ragav Sachdeva and Andrew Zisserman. The change you want to see (now in 3D). InIEEE/CVF International Conference on Computer Vision Workshops, pages 2060–2069, 2023
work page 2060
-
[43]
Change detection from a street image pair using CNN features and superpixel segmentation
Ken Sakurada and Takayuki Okatani. Change detection from a street image pair using CNN features and superpixel segmentation. InBritish Machine Vision Conference, pages 61.1–61.12, Swansea, 2015. British Machine Vision Association
work page 2015
-
[44]
Structure-from-motion revisited
Johannes L Schonberger and Jan-Michael Frahm. Structure-from-motion revisited. InIEEE/CVF Confer- ence on Computer Vision and Pattern Recognition, pages 4104–4113, 2016
work page 2016
-
[45]
Tukey.Exploratory Data Analysis
John W. Tukey.Exploratory Data Analysis. Addison-Wesley, Reading, MA, 1977
work page 1977
-
[46]
ChangeNet: A deep learning architecture for visual change detection
Ashley Varghese, Jayavardhana Gubbi, Akshaya Ramaswamy, and P Balamuralidhar. ChangeNet: A deep learning architecture for visual change detection. InEuropean Conference on Computer Vision Workshops, 2018
work page 2018
-
[47]
Zhou Wang, A.C. Bovik, H.R. Sheikh, and E.P. Simoncelli. Image quality assessment: from error visibility to structural similarity.IEEE Transactions on Image Processing, 13(4):600–612, 2004
work page 2004
-
[48]
City-scale scene change detection using point clouds
Zi Jian Yew and Gim Hee Lee. City-scale scene change detection using point clouds. InIEEE International Conference on Robotics and Automation, pages 13362–13369, 2021
work page 2021
-
[49]
3D scene change modeling with consistent multi-view aggregation
Zirui Zhou, Junfeng Ni, Shujie Zhang, Yixin Chen, and Siyuan Huang. 3D scene change modeling with consistent multi-view aggregation. InInternational Conference on 3D Vision, 2026
work page 2026
-
[50]
EW A splatting.IEEE Transac- tions on Visualization and Computer Graphics, 8(03):223–238, 2002
Matthias Zwicker, Hanspeter Pfister, Jeroen Van Baar, and Markus Gross. EW A splatting.IEEE Transac- tions on Visualization and Computer Graphics, 8(03):223–238, 2002. 12 A GS-DIFFAlgorithm We provide pseudo-code for the full GS-DIFFpipeline (Algorithm 1). Reconstruction is treated as upstream input: we assume two independently built 3DGS reconstructions ...
work page 2002
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.