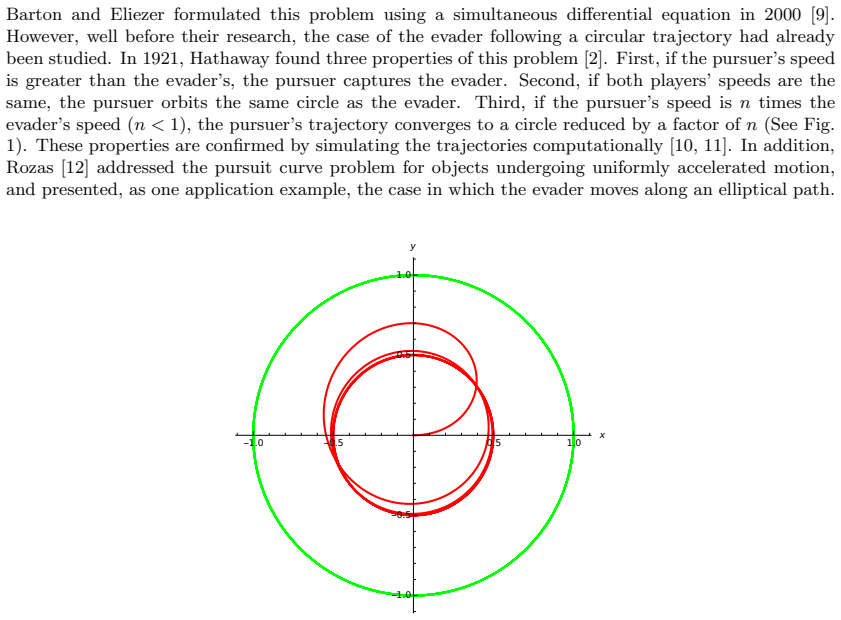
Recognition: no theorem link
Dynamical Systems in Elliptical Pursuit and Evasion
Pith reviewed 2026-05-11 02:11 UTC · model grok-4.3
The pith
In elliptical pursuit-evasion a faster pursuer captures the evader in finite time with an explicit upper bound, while a slower pursuer produces global convergence to a unique periodic solution.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
When the pursuer moves faster than the evader, the system reaches capture in finite time and supplies an explicit upper bound on that time; when the pursuer is slower, the non-autonomous system admits a unique periodic solution that attracts every trajectory globally and asymptotically.
What carries the argument
The reduced dynamical system in angular difference and separation distance, recast via a complex variable that combines logarithmic distance with the angular difference to remove the capture singularity.
If this is right
- Capture time is bounded above by a quantity that depends only on initial separation, speed ratio, and ellipse geometry.
- All solutions converge to the same periodic orbit regardless of starting conditions when the pursuer is slower.
- The circular case is recovered as a special autonomous limit possessing an asymptotically stable equilibrium.
- The non-autonomous character introduced by the ellipse precludes fixed equilibria yet still permits global periodic attractors.
Where Pith is reading between the lines
- The finite-time bound supplies a concrete design criterion for pursuit controllers that must guarantee capture within a prescribed window.
- Periodic convergence for the slower pursuer suggests that elliptical evasion can be used to force predictable long-term looping behavior rather than escape.
- Relaxing the fixed-trajectory-shape assumption would couple the players' paths more tightly and might alter both the bound and the existence of the periodic orbit.
- The complex-variable reformulation may extend to other singular pursuit problems where distance approaches zero.
Load-bearing premise
The shape of the pursuer's trajectory is unaffected by the evader's speed.
What would settle it
A numerical integration or physical experiment in which, for a faster pursuer, the observed capture time exceeds the paper's derived upper bound or, for a slower pursuer, trajectories fail to approach the claimed unique periodic orbit.
Figures





read the original abstract
This paper investigates the difference between the circular and elliptical cases in one-on-one pursuit and evasion problems. Using the simultaneous differential equation derived by Barton and Eliezer, we derive a dynamical system based on the assumption that the shape of the pursuer's trajectory is unaffected by the evader's speed. The dynamical system involves the angular difference between the velocity vectors of the players and their separation distance. When the evader orbits a circle, the dynamical system is autonomous with an asymptotically stable equilibrium point. By contrast, if the evader orbits an ellipse, the dynamical system becomes non-autonomous and lacks an equilibrium point. To handle the singularity at capture, we reformulate the system using a complex variable that includes information about the logarithmic distance and the angular difference. We establish two main results: when the pursuer is faster than the evader, the pursuer captures the evader in finite time, and we derive an explicit upper bound for the capture time; when the pursuer is slower, the system possesses a unique periodic solution to which all trajectories converge globally and asymptotically.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper starts from the Barton-Eliezer simultaneous differential equations for one-on-one pursuit-evasion and derives a reduced two-variable dynamical system (angular difference and separation distance) by adding the explicit modeling assumption that the pursuer's trajectory shape is independent of the evader's speed. For circular evader motion the reduced system is autonomous with an asymptotically stable equilibrium; for elliptical motion it is non-autonomous and has no equilibria. A complex-variable reformulation is introduced to regularize the capture singularity. The two main theorems state that a faster pursuer captures the evader in finite time (with an explicit upper bound on capture time) and that a slower pursuer yields a unique periodic orbit to which all trajectories converge globally and asymptotically.
Significance. If the modeling assumption is valid, the work supplies explicit capture-time bounds and global convergence results for non-circular pursuit-evasion, extending the classical circular case. The complex-variable treatment of the singularity is a technically clean device that could be useful in related problems. The results are falsifiable via simulation of the original Barton-Eliezer equations and therefore constitute a concrete contribution to the dynamical-systems analysis of pursuit-evasion.
major comments (2)
- [Derivation of the reduced dynamical system (immediately after the citation of Barton and Eliezer)] The reduction from the Barton-Eliezer equations to the claimed two-variable system rests entirely on the unverified modeling assumption that the pursuer's trajectory geometry is unaffected by the evader's speed. This assumption is introduced explicitly to close the system but is neither justified analytically nor checked numerically against the full coupled dynamics. Because every subsequent result (finite-time capture bound, periodic-orbit existence, global asymptotic convergence) is proved only for the reduced system, the assumption is load-bearing for the central claims; without support for it, the theorems do not transfer to the original pursuit-evasion problem the paper sets out to solve.
- [Complex-variable reformulation section] The complex-variable reformulation that combines logarithmic distance and angular difference is asserted to remove the capture singularity while preserving the dynamics. The manuscript does not supply an explicit verification that the transformed vector field remains equivalent to the original reduced system away from capture, nor does it address whether the non-autonomous terms arising from the elliptical evader are faithfully carried through the transformation.
minor comments (2)
- [Abstract] The abstract states that the circular case possesses an 'asymptotically stable equilibrium point' while the elliptical case 'lacks an equilibrium point'; a single sentence clarifying that the elliptical system is non-autonomous would prevent readers from expecting an equilibrium to exist.
- [Notation and statement of theorems] Notation for the pursuer and evader speed ratios should be introduced once and used consistently; occasional switches between ratio symbols and separate speed symbols obscure the statements of the two main theorems.
Simulated Author's Rebuttal
We thank the referee for the thorough review and insightful comments, which help clarify the scope and technical details of our work. We address each major comment point by point below, with plans for revisions to improve the manuscript.
read point-by-point responses
-
Referee: [Derivation of the reduced dynamical system (immediately after the citation of Barton and Eliezer)] The reduction from the Barton-Eliezer equations to the claimed two-variable system rests entirely on the unverified modeling assumption that the pursuer's trajectory geometry is unaffected by the evader's speed. This assumption is introduced explicitly to close the system but is neither justified analytically nor checked numerically against the full coupled dynamics. Because every subsequent result (finite-time capture bound, periodic-orbit existence, global asymptotic convergence) is proved only for the reduced system, the assumption is load-bearing for the central claims; without support for it, the theorems do not transfer to the original pursuit-evasion problem the paper sets out to solve.
Authors: The manuscript explicitly introduces the modeling assumption that the pursuer's trajectory shape is independent of the evader's speed in order to reduce the Barton-Eliezer equations to a closed two-variable system in angular difference and separation distance. This is stated in the abstract and derivation section as the basis for obtaining an analytically tractable dynamical system. We agree that the assumption is central and that the theorems apply directly to the reduced system. In the revision we will expand the discussion to include a rationale for the assumption (its consistency with constant-curvature pursuit strategies when speed ratios are fixed) and add numerical simulations comparing trajectories of the reduced system against the full coupled Barton-Eliezer equations for representative elliptical orbits. We will also revise the introduction and conclusion to state clearly that the results hold under this modeling assumption, which is motivated by but not identical to the original pursuit-evasion problem. revision: partial
-
Referee: [Complex-variable reformulation section] The complex-variable reformulation that combines logarithmic distance and angular difference is asserted to remove the capture singularity while preserving the dynamics. The manuscript does not supply an explicit verification that the transformed vector field remains equivalent to the original reduced system away from capture, nor does it address whether the non-autonomous terms arising from the elliptical evader are faithfully carried through the transformation.
Authors: We acknowledge that an explicit verification of dynamical equivalence was omitted. In the revised manuscript we will insert a short lemma immediately after the definition of the complex variable z = log(r) + iθ. The lemma will derive the transformed vector field explicitly, show that it coincides with the original reduced system for r > 0 (i.e., away from capture), and confirm that the time-dependent terms induced by the elliptical evader orbit are preserved without modification under the change of variables. This will be accompanied by a brief remark on the removable nature of the singularity at r = 0. revision: yes
Circularity Check
No circularity: results follow from explicit reduction under stated assumption
full rationale
The paper begins with the external Barton-Eliezer simultaneous DEs, explicitly invokes the modeling assumption that pursuer trajectory shape is independent of evader speed to obtain a reduced non-autonomous ODE in angular difference and separation, then performs standard analysis (complex-variable reformulation, Lyapunov or comparison arguments for finite-time capture when speed ratio >1, and existence/uniqueness of periodic orbit with global attraction when speed ratio <1). No parameter is fitted and relabeled as a prediction, no self-citation supplies a load-bearing uniqueness theorem, and no step equates the claimed bound or convergence result to the input equations by definition. The derivation chain is therefore self-contained once the (explicitly declared) modeling assumption is granted.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The shape of the pursuer's trajectory is unaffected by the evader's speed.
Reference graph
Works this paper leans on
-
[1]
Bouguer, P.: Memories de l’Academie Royale des Sciences, 1-14 (1732)
-
[2]
Hathaway, A.S., Archibald, R.C., Manning, H.P.: Problems and solutions: 2801. Am. Math. Mon. 28(2), 91–97 (1921).https://doi.org/10.2307/2973052
-
[3]
Bernhart, A.: Curves of pursuit. Scr. Math.20, 125–141 (1954)
work page 1954
-
[4]
Isaacs, R.: Differential Games: A Mathematical Theory with Applications to Warfare and Pursuit, Control and Optimization. Wiley, New York (1965)
work page 1965
- [5]
-
[6]
Kumkov, S.S., Le M´ enec, S., Patsko, V.S.: Zero-sum pursuit-evasion differential games with many objects: survey of publications. Dyn. Games Appl.7, 609–633 (2017).https://doi.org/10.1007/ s13235-016-0209-z
work page 2017
-
[7]
Azamov, A.: On a problem of escape along a prescribed curve. J. Appl. Math. Mech.46(4), 553–555 (1982).https://doi.org/10.1016/0021-8928(82)90045-4
-
[8]
Kuchkarov, A.Sh.: Solution of simple pursuit-evasion problem when evader moves on a given curve. Int. Game Theory Rev.12(3), 223–238 (2010).https://doi.org/10.1142/S0219198910002647
-
[9]
Barton, J.C., Eliezer, C.J.: On pursuit curves. J. Aust. Math. Soc. Ser. B41, 358–371 (2000). https://doi.org/10.1017/S0334270000011292
-
[10]
Springer, Singapore (2019).https://doi.org/10.1007/978-981-15-1731-0 19
Kamimura, A., Ohira, T.: Group Chase and Escape: Fusion of Pursuit-Escapes and Collective Motion. Springer, Singapore (2019).https://doi.org/10.1007/978-981-15-1731-0 19
-
[11]
Princeton University Press, Princeton (2007)
Nahin, P.J.: Chases and Escapes: The Mathematics of Pursuit and Evasion. Princeton University Press, Princeton (2007)
work page 2007
-
[12]
arXiv:2508.03841 (2025).https://doi.org/10.48550/arXiv.2508
Rozas, L.: A numerical procedure for the determination of the pursuit curve of objects with uniformly accelerated motion. arXiv:2508.03841 (2025).https://doi.org/10.48550/arXiv.2508. 03841
-
[13]
Yoshihara, S., Ohira, T.: Pursuit and evasion: from singles to groups. J. Phys. Conf. Ser.2207, 012014 (2022).https://doi.org/10.1088/1742-6596/2207/1/012014
-
[14]
Yoshihara, S.: Elliptical pursuit and evasion. J. Phys. Conf. Ser., in press (2026)
work page 2026
-
[15]
arXiv:2401.06338v3 (2024).https: //doi.org/10.48550/arXiv.2401.06338
Yoshihara, S.: Elliptical pursuit and evasion –extended version–. arXiv:2401.06338v3 (2024).https: //doi.org/10.48550/arXiv.2401.06338
-
[16]
Texts in Applied Mathematics, vol 2
Wiggins, S.: Introduction to Applied Nonlinear Dynamical Systems and Chaos, 2nd edn. Texts in Applied Mathematics, vol 2. Springer, New York (2000)
work page 2000
-
[17]
Wolfram Research, Inc., Champaign, Illinois (2024) 20
Wolfram Research, Inc.: Mathematica, Version 14.1. Wolfram Research, Inc., Champaign, Illinois (2024) 20
work page 2024
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.