Recognition: 2 theorem links
· Lean TheoremHot Wire 5D+: Evaluating Cognitive and Motor Trade-offs of Visual Feedback for 5D Augmented Reality Trajectories
Pith reviewed 2026-05-11 02:31 UTC · model grok-4.3
The pith
AR visual feedback mitigates orientation-induced cognitive-motor trade-offs in 5D trajectory tasks for novice users.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
Orientation constraints in 5D AR trajectory following create measurable cognitive-motor trade-offs that increase errors and workload, but specific visual feedback paradigms produce UI synergies that improve compliance in position, orientation, and speed; these effects were isolated through phase segmentation and ART ANOVA analysis on data from 30 participants whose internal AR tracking was validated externally.
What carries the argument
Comparison of three AR UI concepts for trajectory guidance, with and without orientation constraints, analyzed via Aligned Rank Transform ANOVA on transient and steady-state execution phases to detect interactions between visual design and task complexity.
If this is right
- Conservative performance baselines for spatial, orientational, and speed compliance become available for evaluating future AR guidance systems.
- Orientation requirements reduce position and speed accuracy unless offset by specific visual feedback combinations.
- Subjective workload scores align with objective compliance drops, supporting use of NASA-TLX and SUS alongside tracking metrics.
- Design guidelines emerge for selecting UI elements that balance multiple constraints in rotation-symmetric tool tasks.
Where Pith is reading between the lines
- Training programs could introduce orientation constraints gradually to help novices reach the identified steady-state performance levels faster.
- Adaptive AR systems might monitor real-time workload indicators and switch feedback modes when trade-offs exceed thresholds.
- The external validation method for internal tracking could be adopted in other high-precision AR domains to ensure measurement reliability.
- Longer-duration studies would likely show whether steady-state synergies persist or degrade under sustained use.
Load-bearing premise
Short lab results from 30 untrained participants in controlled settings generalize to longer tasks by trained professionals under real-world lighting, fatigue, and environmental variation.
What would settle it
A replication study using experienced operators on extended-duration 5D tasks in actual work environments that finds no orientation trade-offs or different optimal UI effects would falsify the reported baselines and design guidelines.
Figures





read the original abstract
Augmented Reality (AR) is increasingly utilized to guide users through complex spatial tasks in domains such as manufacturing, non-destructive testing, and surgery. These applications often require strict compliance with 5D+ trajectories using rotation-symmetric tools (3D position, 2D orientation, and movement speed). However, the sensori-motor baselines of untrained users during these multidimensional tracing tasks, along with the cognitive-motor trade-offs induced by varying visual feedback paradigms, remain underexplored. We present a controlled within-subjects user study (N=30) evaluating three distinct AR UI concepts for trajectory guidance, both with and without explicit orientation constraints. We analyzed spatial, orientational, and speed compliance based on the internal AR tracking, which was validated against a high-precision external optical tracking system to rule out hardware drift. By segmenting the execution into transient and steady-state phases and applying Aligned Rank Transform (ART) ANOVA, we isolated the interaction effects between visual design and task complexity. Alongside subjective metrics (NASA-TLX, SUS), our results establish conservative performance baselines for novice users performing freehand 5D trajectory following. We reveal orientation-induced cognitive-motor trade-offs and identify mitigating UI synergies. Ultimately, we provide empirical baselines and actionable design guidelines for developing effective AR guidance systems.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper reports a within-subjects user study (N=30) comparing three AR visual feedback paradigms for guiding users along 5D trajectories (3D position + 2D orientation + speed) using rotation-symmetric tools. It validates internal AR tracking against external optical tracking, segments trials into transient and steady-state phases, applies ART ANOVA to performance metrics (spatial, orientational, speed compliance), collects NASA-TLX and SUS scores, and concludes by identifying orientation-induced cognitive-motor trade-offs, UI synergies, novice baselines, and actionable design guidelines for AR guidance systems.
Significance. If the empirical results hold, the work supplies conservative, reproducible novice baselines and detects specific interactions between visual feedback design and orientation constraints in multidimensional AR tasks. This is relevant to HCI and AR applications in manufacturing and surgery. The identification of trade-offs and mitigating UI variants is a concrete contribution, but the significance for broader design practice is reduced because the study does not test whether these patterns survive training, fatigue, or real-world conditions.
major comments (2)
- [Abstract] Abstract: The statement that the study 'provide[s] empirical baselines and actionable design guidelines for developing effective AR guidance systems' is not supported by the reported evidence. All data derive from short lab trials with untrained participants; no measurements address retention after training, performance under fatigue, variable lighting, or environmental noise. This directly undermines the load-bearing claim that the observed trade-offs and synergies yield generalizable guidelines.
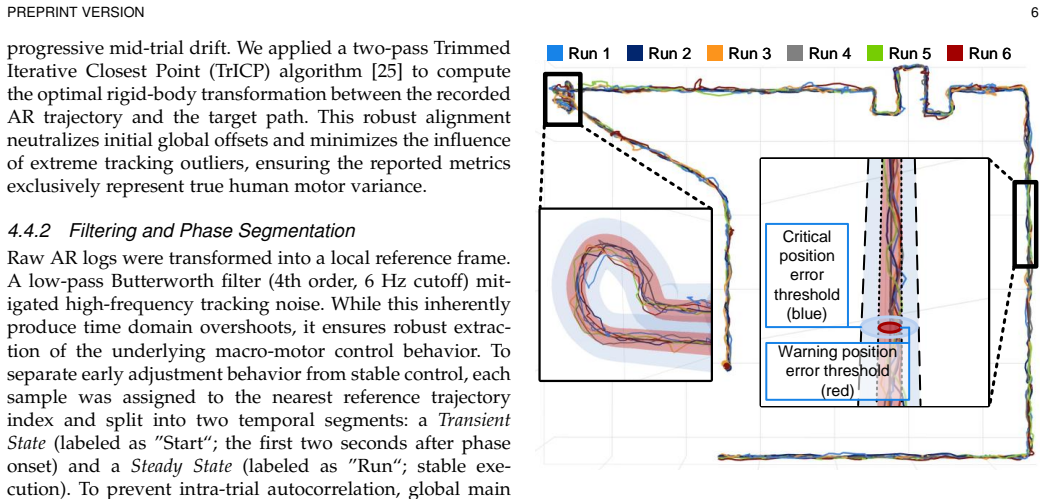
- [Methods/Results] Methods and Results sections (phase segmentation and ART ANOVA): While the within-subjects design, external tracking validation, and ART ANOVA are appropriate, the manuscript does not report how transient vs. steady-state phases were defined (e.g., velocity threshold or time window) or whether any post-hoc participant exclusions occurred. These details are necessary to evaluate whether the reported interaction effects are robust to analysis choices.
minor comments (2)
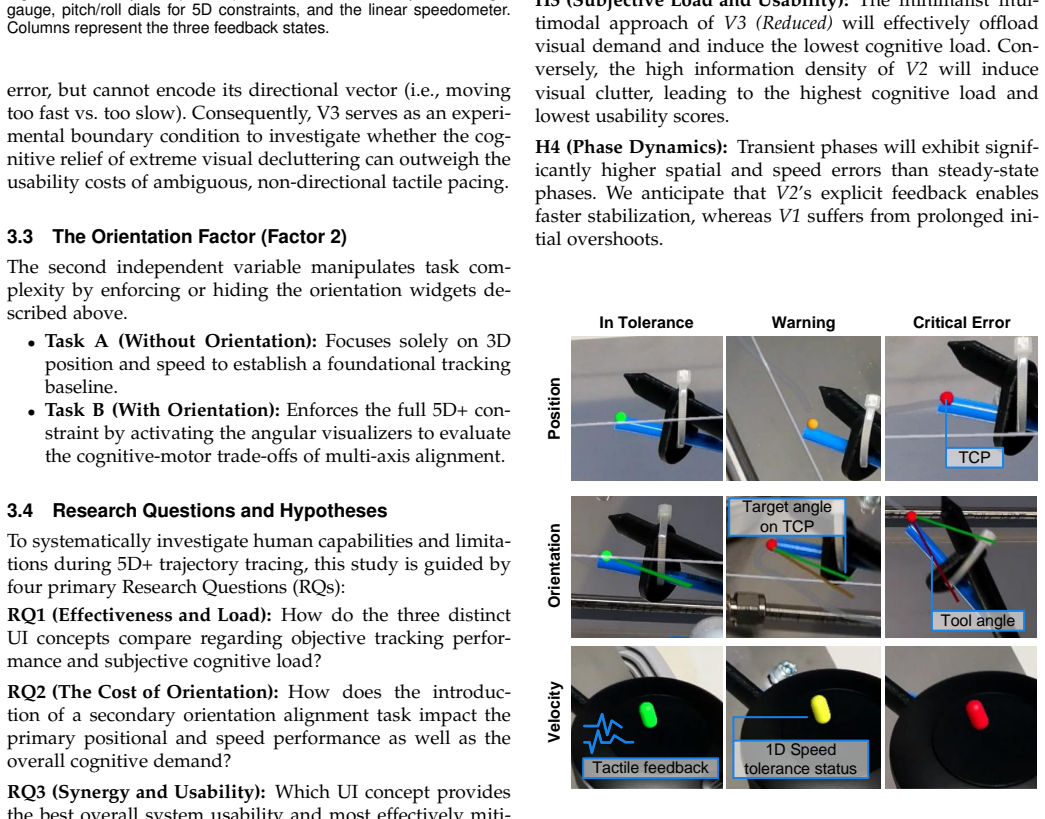
- [Abstract] The abstract refers to 'three distinct AR UI concepts' without naming them or citing the corresponding figures; adding explicit labels (e.g., 'UI-A, UI-B, UI-C') would improve readability.
- [Participants] Participant screening criteria, handedness, and prior AR experience are mentioned only in passing; a table or paragraph with exact inclusion/exclusion rules and demographics would strengthen the baseline claims.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback on the scope of our claims and the need for additional methodological detail. We address each major comment below and will incorporate revisions to strengthen the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The statement that the study 'provide[s] empirical baselines and actionable design guidelines for developing effective AR guidance systems' is not supported by the reported evidence. All data derive from short lab trials with untrained participants; no measurements address retention after training, performance under fatigue, variable lighting, or environmental noise. This directly undermines the load-bearing claim that the observed trade-offs and synergies yield generalizable guidelines.
Authors: We agree that the abstract phrasing risks overstating generalizability. The manuscript explicitly frames the results as conservative novice baselines in controlled lab conditions and derives design guidelines from the specific interactions observed in this setting. We do not claim applicability to trained users, fatigue, or real-world environments. In revision we will rephrase the abstract to state that the work supplies novice-specific baselines and context-dependent design insights for 5D AR trajectory guidance, thereby aligning the language precisely with the reported evidence. revision: yes
-
Referee: [Methods/Results] Methods and Results sections (phase segmentation and ART ANOVA): While the within-subjects design, external tracking validation, and ART ANOVA are appropriate, the manuscript does not report how transient vs. steady-state phases were defined (e.g., velocity threshold or time window) or whether any post-hoc participant exclusions occurred. These details are necessary to evaluate whether the reported interaction effects are robust to analysis choices.
Authors: We acknowledge that the current description of phase segmentation lacks the required operational detail. The revised Methods section will specify the exact criteria used to delineate transient and steady-state phases, including any velocity thresholds or temporal windows. We will also explicitly state that no post-hoc participant exclusions were performed and that the full sample of 30 participants was retained for all analyses. revision: yes
Circularity Check
No circularity: purely empirical user study with direct measurements and statistical tests
full rationale
The paper reports a within-subjects lab study (N=30) that collects performance data on 5D trajectory following under three UI conditions, validates internal AR tracking against external optical tracking, segments trials into phases, and applies ART ANOVA plus subjective scales (NASA-TLX, SUS). No equations, fitted parameters, predictions derived from prior fits, uniqueness theorems, or ansatzes appear. All claims rest on the collected data and standard statistical procedures rather than reducing to self-defined inputs or self-citations. Generalizability limitations are explicitly acknowledged rather than smuggled in. This is self-contained empirical work; score 0 is the appropriate finding.
Axiom & Free-Parameter Ledger
axioms (1)
- standard math Standard assumptions of Aligned Rank Transform ANOVA hold for the collected compliance data
Lean theorems connected to this paper
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We present a controlled within-subjects user study (N=30) evaluating three distinct AR UI concepts... applying Aligned Rank Transform (ART) ANOVA... establish conservative performance baselines for novice users
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
Quantification of Cognitive-Motor Trade-offs... Actionable Design Guidelines
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Aug- mented reality: A comprehensive review,
S. Dargan, S. Bansal, M. Kumar, A. Mittal, and K. Kumar, “Aug- mented reality: A comprehensive review,”Archives of Computa- tional Methods in Engineering, vol. 30, no. 2, pp. 1057–1080, 2023
work page 2023
-
[2]
K. Weman, “Mig/mag welding,” inWelding Processes Handbook. Elsevier, 2012, pp. 75–97
work page 2012
-
[3]
A. Doshi, R. T. Smith, B. H. Thomas, and C. Bouras, “Use of pro- jector based augmented reality to improve manual spot-welding precision and accuracy for automotive manufacturing,”The Inter- national Journal of Advanced Manufacturing Technology, vol. 89, no. 5–8, pp. 1279–1293, 2017
work page 2017
-
[4]
E. Schoop, M. Nguyen, D. Lim, V . Savage, S. Follmer, and B. Hart- mann, “Drill sergeant,” inProceedings of the 2016 CHI Conference Extended Abstracts on Human Factors in Computing Systems, 2016, pp. 1607–1614
work page 2016
-
[5]
Q. Sun, Y. Mai, R. Yang, T. Ji, X. Jiang, and X. Chen, “Fast and accurate online calibration of optical see-through head-mounted display for ar-based surgical navigation using microsoft hololens,” International Journal of Computer Assisted Radiology and Surgery, vol. 15, no. 11, pp. 1907–1919, 2020
work page 1907
-
[6]
Anisotropic human perfor- mance in six degree-of-freedom tracking,
S. Zhai, P . Milgram, and A. Rastogi, “Anisotropic human perfor- mance in six degree-of-freedom tracking,”IEEE Transactions on Systems, Man, and Cybernetics - Part A: Systems and Humans, vol. 27, no. 4, pp. 518–528, 1997
work page 1997
-
[7]
Y.-P . Suet al., “Mixed reality-enhanced intuitive teleoperation with hybrid virtual fixtures for intelligent robotic welding,”Applied Sciences, vol. 11, no. 23, p. 11280, 2021
work page 2021
-
[8]
The art of timing: Effects of ar guidance timing on speed control,
J. Ceyssenset al., “The art of timing: Effects of ar guidance timing on speed control,” in2024 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2024, pp. 31–40
work page 2024
-
[9]
X. Liet al., “Usability of visualizing position and orientation de- viations for manual precise manipulation of objects in augmented reality,”Virtual Reality, vol. 28, pp. 1–15, 2024
work page 2024
-
[10]
Metrics for continuous behavioral adjustments in pursuit-tracking tasks,
L. Broekeret al., “Metrics for continuous behavioral adjustments in pursuit-tracking tasks,”Behavior Research Methods, vol. 53, pp. 2571–2586, 2021
work page 2021
-
[11]
M. Sukan, C. Elvezio, O. Oda, S. Feiner, and B. Tversky, “Parafrus- tum: visualization techniques for guiding a user to a constrained set of viewing positions and orientations,” inProceedings of the 27th Annual ACM Symposium on User Interface Software and Technology (UIST), 2014, pp. 331–340
work page 2014
-
[12]
M. Benmahdjoubet al., “Degrees of freedom separation and pin- npivot to address depth perception limitations in manual regis- tration for ar-assisted surgical navigation,”International Journal of Computer Assisted Radiology and Surgery, vol. 21, no. 1, pp. 147–151, 2025
work page 2025
-
[13]
Lightguide: Projected vi- sualizations for hand movement guidance,
R. Sodhi, H. Benko, and A. Wilson, “Lightguide: Projected vi- sualizations for hand movement guidance,” inProceedings of the SIGCHI Conference on Human Factors in Computing Systems (CHI), 2012, pp. 179–188
work page 2012
-
[14]
Ar hmd guidance for controlled hand-held 3d acquisition,
D. Andersen, P . Villano, and V . Popescu, “Ar hmd guidance for controlled hand-held 3d acquisition,”IEEE Transactions on Visual- ization and Computer Graphics, vol. 25, no. 11, pp. 3073–3082, 2019
work page 2019
-
[15]
Ar-assisted surgical guidance system for ventricu- lostomy,
J. Eomet al., “Ar-assisted surgical guidance system for ventricu- lostomy,”IEEE Journal of Translational Engineering in Health and Medicine, 2022
work page 2022
-
[16]
Wearable augmented reality platform for aiding complex interventions,
S. Condinoet al., “Wearable augmented reality platform for aiding complex interventions,”Annals of Biomedical Engineering, 2020
work page 2020
-
[17]
Y. Liet al., “Accuracy and efficiency of drilling trajectories with augmented reality versus conventional navigation randomized crossover trial,”npj Digital Medicine, vol. 7, no. 1, p. 316, 2024
work page 2024
-
[18]
X. Liet al., “Usability study of augmented reality visualization modalities on localization accuracy in the head and neck,”Inter- national Journal of Computer Assisted Radiology and Surgery, 2026
work page 2026
-
[19]
Comparison of projective augmented reality concepts to support medical needle insertion,
P . Meweset al., “Comparison of projective augmented reality concepts to support medical needle insertion,”IEEE Transactions on Visualization and Computer Graphics, vol. 26, no. 6, pp. 2200– 2212, 2019
work page 2019
-
[20]
Computer-assisted trajectory planning for percuta- neous needle insertions,
A. Seitelet al., “Computer-assisted trajectory planning for percuta- neous needle insertions,”Medical Physics, vol. 38, no. 6, pp. 3246– 3259, 2011
work page 2011
-
[21]
J. Wolfet al., “Augmented reality navigation system for pedicle screw placement: evaluating abstract and anatomical visualiza- tions,”International Journal of Computer Assisted Radiology and Surgery, vol. 17, no. 8, pp. 1511–1520, 2022
work page 2022
-
[22]
Precise tool to target positioning widgets (totta) in spatial environments: A systematic review,
M. Dastan, M. Fiorentino, and A. E. Uva, “Precise tool to target positioning widgets (totta) in spatial environments: A systematic review,”IEEE Transactions on Visualization and Computer Graphics, 2024
work page 2024
-
[23]
M. Dastan, A. E. Uva, and M. Fiorentino, “Gestalt driven aug- mented collimator widget for precise 5 dof dental drill tool po- sitioning in 3d space,” in2022 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2022, pp. 187–195
work page 2022
-
[24]
M. Dastanet al., “An open testbed for mixed reality precise rotation guidance: Comparative case study of arrow, gestalt and magnifier cues,” in2025 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2025
work page 2025
-
[25]
Calligraphy-stroke learning sup- port system using projector and motion sensor,
T. Matsumaru and M. Narita, “Calligraphy-stroke learning sup- port system using projector and motion sensor,”Journal of Ad- vanced Computational Intelligence and Intelligent Informatics, vol. 21, no. 4, pp. 697–708, 2017
work page 2017
-
[26]
M. J. Fischer and E. B. Strong, “Ar surgical navigation with surface tracing: Comparing in-situ visualization with tool-tracking guidance,” in2025 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2025, pp. 1170–1179
work page 2025
-
[27]
Exploring trajectory data in augmented reality: A comparative study of interaction modalities,
L. Jooset al., “Exploring trajectory data in augmented reality: A comparative study of interaction modalities,” in2023 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2023, pp. 790–799
work page 2023
-
[28]
Ar guidance design for line tracing speed con- trol,
J. Ceyssenset al., “Ar guidance design for line tracing speed con- trol,” in2023 IEEE International Symposium on Mixed and Augmented Reality (ISMAR), 2023, pp. 1055–1063
work page 2023
-
[29]
Examining the fine motor control ability of linear hand movement in virtual reality,
X. Yi, X. Wang, J. Li, and H. Li, “Examining the fine motor control ability of linear hand movement in virtual reality,” in2023 IEEE Conference Virtual Reality and 3D User Interfaces (VR), 2023, pp. 427– 437
work page 2023
-
[30]
Y. Zhou, M. Hou, and K. Baraka, “Static is not enough: A compar- ative study of vr and spacemouse in static and dynamic teleoper- ation tasks,” inACM/IEEE International Conference on Human-Robot Interaction (HRI), 2026
work page 2026
-
[31]
Design space of visual feed- forward and corrective feedback in xr-based motion guidance systems,
X. Yu, B. Lee, and M. Sedlmair, “Design space of visual feed- forward and corrective feedback in xr-based motion guidance systems,” inProceedings of the CHI Conference on Human Factors in Computing Systems, 2024, pp. 1–15
work page 2024
-
[32]
A tutorial on quantitative trajec- tory evaluation for visual(-inertial) odometry,
Z. Zhang and D. Scaramuzza, “A tutorial on quantitative trajec- tory evaluation for visual(-inertial) odometry,” in2018 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2018, pp. 7244–7251
work page 2018
-
[33]
Seesys: Online pose error estimation system for visual slam,
T. Huet al., “Seesys: Online pose error estimation system for visual slam,” inProceedings of the 22nd ACM Conference on Embedded Networked Sensor Systems (SenSys ’24), 2024, pp. 322–335
work page 2024
-
[34]
C. Masuhr, J. Koch, and T. Sch ¨uppstuhl, “Evaluating magic leap 2 controller tracking for sensor tool guidance in ar-based industrial inspections,” in2025 IEEE International Symposium on Mixed and Augmented Reality Adjunct (ISMAR-Adjunct), 2025, pp. 440–449
work page 2025
-
[35]
Robustness in human manipulation of dynamically complex objects through control contraction metrics,
S. Bazzi and D. Sternad, “Robustness in human manipulation of dynamically complex objects through control contraction metrics,” IEEE Robotics and Automation Letters, vol. 5, no. 2, pp. 2578–2585, 2020
work page 2020
-
[36]
M. Dastanet al., “Co-designing dynamic mixed reality drill po- sitioning widgets: A collaborative approach with dentists,”IEEE Transactions on Visualization and Computer Graphics, 2024
work page 2024
-
[37]
Multimodal feedback for ost-ar guidance with wrist haptics,
M. Hollet al., “Multimodal feedback for ost-ar guidance with wrist haptics,” inProceedings of the 2024 CHI Conference on Human Factors in Computing Systems (CHI), 2024
work page 2024
-
[38]
The aligned rank transform for nonparametric factorial analyses using only anova procedures,
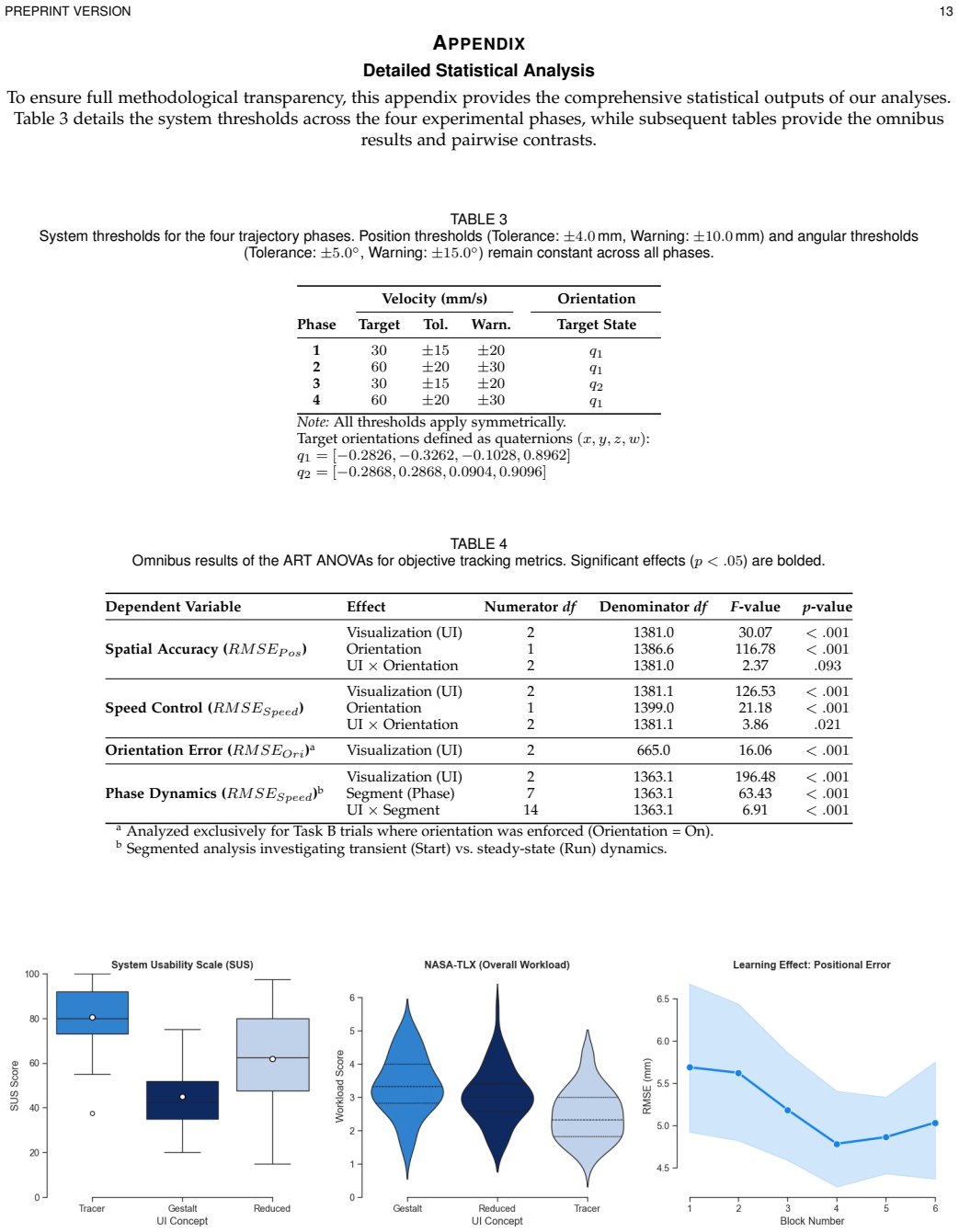
J. O. Wobbrock, L. Findlater, D. Gergle, and J. J. Higgins, “The aligned rank transform for nonparametric factorial analyses using only anova procedures,” inProceedings of the ACM Conference on Human Factors in Computing Systems (CHI ’11), 2011, pp. 143–146. PREPRINT VERSION 13 APPENDIX Detailed Statistical Analysis To ensure full methodological transpare...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.