Recognition: 2 theorem links
· Lean TheoremAdaptive Domain Decomposition Physics-Informed Neural Networks for Traffic State Estimation with Sparse Sensor Data
Pith reviewed 2026-05-11 02:34 UTC · model grok-4.3
The pith
A residual-guided adaptive domain decomposition allows physics-informed networks to reconstruct traffic speed fields more accurately from sparse sensors.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
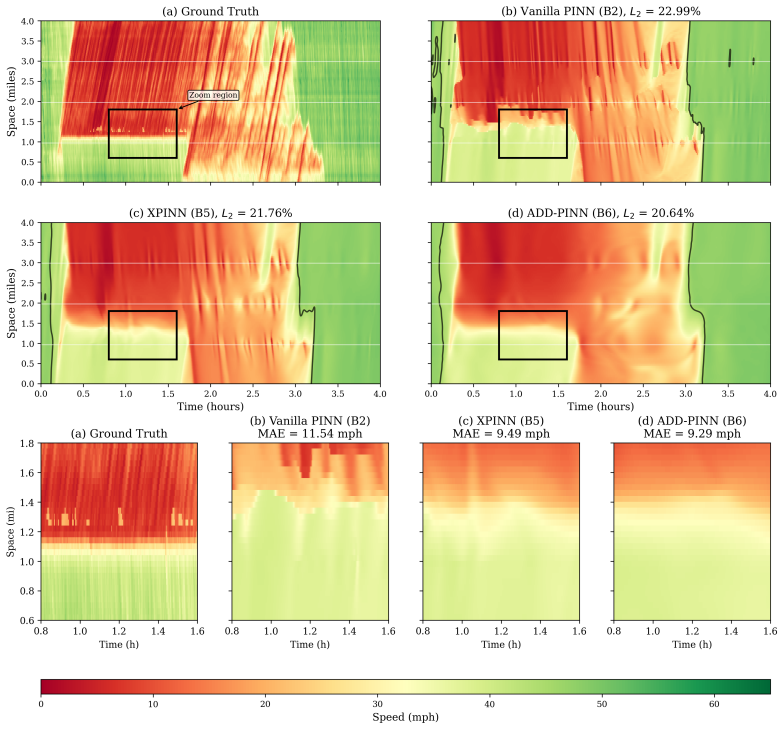
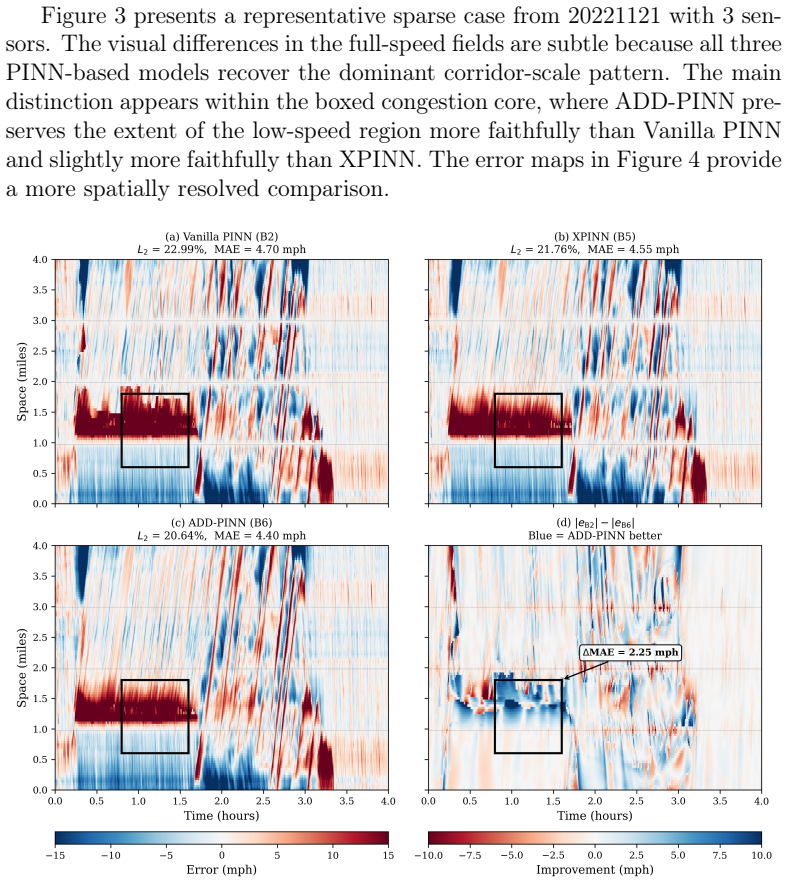
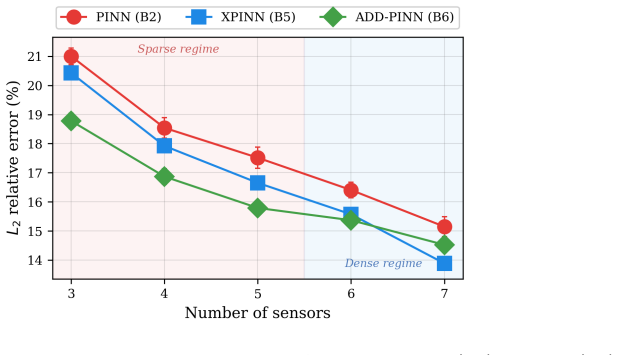
Training a coarse global PINN first, then using its spatial residual profile to locate and isolate localized transition regions for separate subdomain subnetworks, combined with a data-driven shock indicator that retains the single-domain fallback when evidence of transitions is weak, produces lower relative L2 error than neural and physics-informed baselines in 18 of 25 configurations and in 14 of 15 sparse-sensing cases while training 2.4 times faster than the XPINN baseline.
What carries the argument
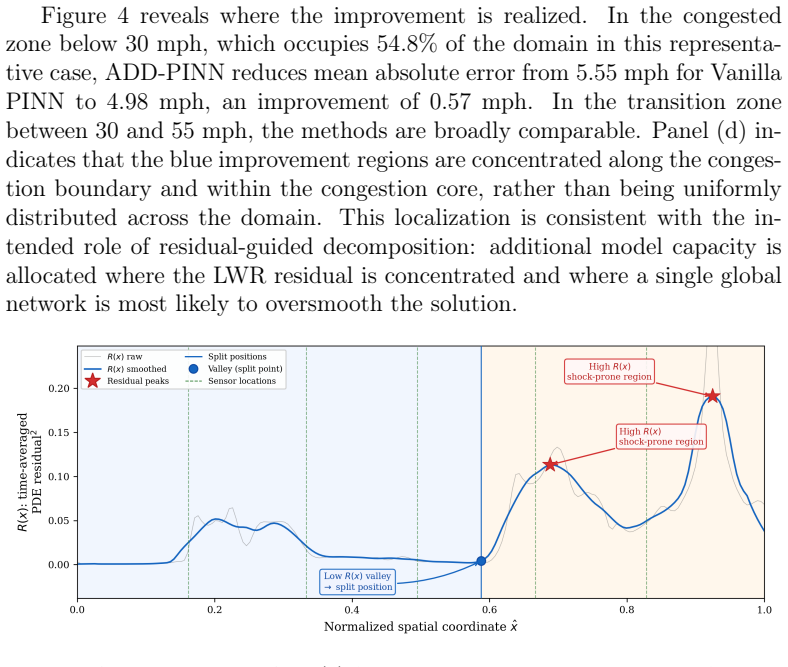
ADD-PINN, the two-stage residual-guided adaptive domain decomposition framework that uses the spatial residual profile of a coarse global PINN to place subdomain boundaries and initialize child subnetworks only when a shock indicator detects localized transitions.
If this is right
- ADD-PINN attains the lowest relative L2 error against baselines in the majority of tested sensor configurations, particularly the sparsest ones.
- Training completes 2.4 times faster than the XPINN baseline under the same conditions.
- An ablation study shows that spatial-only decomposition works as an effective default for fixed-sensor traffic reconstruction.
- On the NGSIM negative-control dataset the shock indicator suppresses decomposition in every run and the single-domain version ranks first.
Where Pith is reading between the lines
- The same residual-driven boundary placement could be tested on other hyperbolic conservation laws that produce sharp fronts, such as shallow-water or gas-dynamics problems.
- If the coarse residual stage can be made incremental, the framework might support online updating of subdomain models as new sensor readings arrive.
- Direct comparison of the automatically chosen boundaries against known analytic shock trajectories in simulated LWR data would quantify how precisely the residual locates transitions.
Load-bearing premise
The spatial residual profile from the coarse global PINN reliably identifies locations of localized transition regions for subdomain boundary placement, and the data-driven shock indicator correctly decides when decomposition is beneficial versus when the single-domain fallback should be used.
What would settle it
On a new sparse-sensor traffic dataset containing independently measured shockwave locations, the method would fail if the subdomain boundaries chosen from the coarse residual do not align with those measured locations or if error does not drop relative to the single-domain model precisely when the shock indicator triggers decomposition.
Figures

read the original abstract
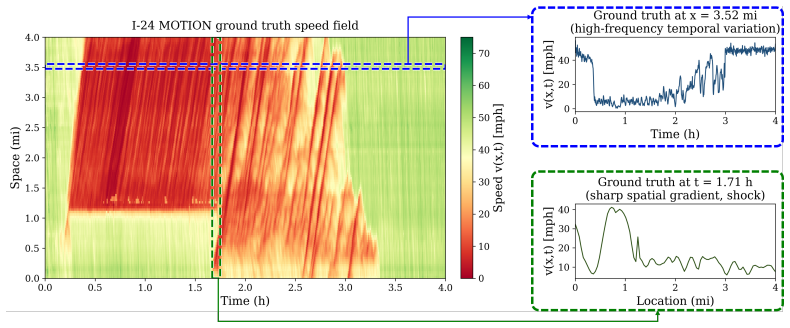
Traffic state estimation from sparse fixed sensors is challenging because physics-informed neural networks (PINNs) tend to over-smooth the shockwaves admitted by the Lighthill-Whitham-Richards (LWR) model. This study proposes Adaptive Domain Decomposition Physics-Informed Neural Networks (ADD-PINN), a two-stage residual-guided framework for LWR-based offline speed-field reconstruction. A coarse global PINN is first trained; its spatial residual profile is then used to place subdomain boundaries and initialize child subnetworks in a decomposition-enabled mode, while a data-driven shock indicator can retain a single-domain fallback when localized evidence of transition is weak. The primary offline I-24 MOTION evaluation spans five days, five sensor configurations, and ten seeds per configuration, yielding 1,500 runs in total. Against neural and physics-informed baselines, ADD-PINN attains the lowest relative L2 error in 18 of 25 configurations and in 14 of 15 sparse-sensing cases, while training 2.4 times faster than the extended PINN (XPINN) baseline. An ablation study supports spatial-only decomposition as an effective default for fixed-sensor traffic reconstruction in the evaluated settings. Supplementary Next Generation Simulation (NGSIM) experiments serve as a negative control: the shock indicator suppresses decomposition in all 50 runs, and the default single-domain fallback ranks first across all sensor configurations. These results support residual-guided spatial decomposition as an effective PINN-family design for offline reconstruction when sparse fixed sensing coincides with localized transition regions.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes Adaptive Domain Decomposition Physics-Informed Neural Networks (ADD-PINN) for offline LWR-based traffic speed-field reconstruction from sparse fixed sensors. A coarse global PINN is trained first; its spatial residual profile guides subdomain boundary placement and subnetwork initialization, while a data-driven shock indicator decides whether to activate decomposition or fall back to single-domain mode. On I-24 MOTION data (five days, five sensor layouts, ten seeds: 1,500 total runs) ADD-PINN reports the lowest relative L2 error in 18 of 25 configurations and 14 of 15 sparse-sensing cases, trains 2.4 times faster than the XPINN baseline, and is supported by an ablation study favoring spatial-only decomposition plus an NGSIM negative-control experiment in which the indicator suppresses decomposition in all runs.
Significance. If the empirical claims are robust, the work supplies a concrete, residual-guided mechanism for mitigating over-smoothing of discontinuities in PINN traffic models under sparse sensing. The scale of the evaluation (1,500 runs with multiple baselines and an ablation), the explicit negative-control design on NGSIM, and the reported training-speed advantage constitute genuine strengths that could inform subsequent PINN architecture choices for transportation applications.
major comments (3)
- [Methods (domain-decomposition procedure)] The central performance claim depends on the assumption that the spatial residual of the initial coarse global PINN reliably locates localized LWR transition regions for subdomain boundary placement. Under the sparse fixed-sensor regimes that constitute the primary evaluation, the coarse PINN is itself under-constrained; its residual may therefore be dominated by sensor gaps or global smoothing rather than true discontinuities. No quantitative comparison of detected boundaries against ground-truth shock locations (or against an oracle decomposition) is provided to substantiate this step.
- [Results (shock-indicator ablation)] The data-driven shock indicator is asserted to activate decomposition only when it improves reconstruction. While the NGSIM experiments demonstrate that the indicator can suppress decomposition, the manuscript does not report a direct validation (e.g., error difference with versus without the indicator on I-24 cases known to contain transitions) showing that positive decisions align with error reduction. This leaves the indicator’s decision rule as an untested link in the pipeline.
- [Experimental setup and evaluation protocol] The experimental protocol for held-out sensor evaluation and any post-hoc data-exclusion or hyper-parameter choices are insufficiently detailed. Without these specifics it is impossible to determine whether the reported superiority in the 14 of 15 sparse-sensing cases could be affected by particular splits or tuning decisions that were not pre-specified.
minor comments (2)
- [Results (training-time comparison)] Clarify whether the 2.4× training-time advantage versus XPINN is measured wall-clock time on identical hardware or includes other factors; state the precise hardware and batch-size settings used for the timing comparison.
- [Ablation study] The abstract states that an ablation study supports “spatial-only decomposition as an effective default”; the corresponding table or figure should explicitly list the error and timing deltas for the spatial-only versus full (spatial+temporal) variants.
Simulated Author's Rebuttal
We thank the referee for the constructive and detailed feedback. The comments highlight important aspects of the method's validation and experimental rigor. We address each major comment point by point below and indicate the revisions planned for the manuscript.
read point-by-point responses
-
Referee: [Methods (domain-decomposition procedure)] The central performance claim depends on the assumption that the spatial residual of the initial coarse global PINN reliably locates localized LWR transition regions for subdomain boundary placement. Under the sparse fixed-sensor regimes that constitute the primary evaluation, the coarse PINN is itself under-constrained; its residual may therefore be dominated by sensor gaps or global smoothing rather than true discontinuities. No quantitative comparison of detected boundaries against ground-truth shock locations (or against an oracle decomposition) is provided to substantiate this step.
Authors: We agree that a direct quantitative validation of the residual-guided boundary placement against ground-truth shock locations would strengthen the methods section. In the revised manuscript we will add an analysis on I-24 segments where dense reference data allow identification of true transition locations. We will report boundary placement error relative to an oracle decomposition derived from the full sensor set and include a comparison of residual peaks to known shock positions. This addition will directly address the concern about reliability under sparse sensing. revision: yes
-
Referee: [Results (shock-indicator ablation)] The data-driven shock indicator is asserted to activate decomposition only when it improves reconstruction. While the NGSIM experiments demonstrate that the indicator can suppress decomposition, the manuscript does not report a direct validation (e.g., error difference with versus without the indicator on I-24 cases known to contain transitions) showing that positive decisions align with error reduction. This leaves the indicator’s decision rule as an untested link in the pipeline.
Authors: The referee correctly notes the absence of a direct error comparison on I-24 cases containing transitions. We will add this ablation in the revision: for I-24 days and sensor layouts with visible shockwaves, we will report the relative L2 error when the indicator is allowed to decide versus when decomposition is forced on or off. This will quantify whether positive indicator decisions correspond to error reductions and will be presented alongside the existing NGSIM negative-control results. revision: yes
-
Referee: [Experimental setup and evaluation protocol] The experimental protocol for held-out sensor evaluation and any post-hoc data-exclusion or hyper-parameter choices are insufficiently detailed. Without these specifics it is impossible to determine whether the reported superiority in the 14 of 15 sparse-sensing cases could be affected by particular splits or tuning decisions that were not pre-specified.
Authors: We acknowledge that the current description of the evaluation protocol is insufficient for full reproducibility. In the revised manuscript we will expand Section 4 to specify: (i) the exact procedure for selecting held-out sensors in each of the five layouts, (ii) confirmation that no post-hoc data exclusion was performed beyond the standard preprocessing described, and (iii) the hyper-parameter selection process, including that all choices were fixed before running the main experiments and were not tuned on test splits. We will also make the code and data splits publicly available upon acceptance. revision: yes
Circularity Check
No circularity: empirical performance on held-out data
full rationale
The paper's central claims are empirical: ADD-PINN achieves lowest relative L2 error in 18/25 configurations and 14/15 sparse cases, with 2.4x faster training than XPINN. These are measured on real I-24 and NGSIM datasets across multiple sensor configurations, days, and random seeds. The method itself (coarse global PINN residual for subdomain placement, data-driven shock indicator for fallback) is a procedural algorithm whose outputs are evaluated against independent ground-truth speed fields; no equation or result is shown to equal its own fitted parameters or training inputs by construction. No self-citation is load-bearing for the performance numbers, and the derivation chain consists of standard PINN training plus heuristic decomposition rules whose validity is tested rather than assumed tautologically.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption The LWR model accurately captures traffic dynamics including shockwaves under the conditions studied.
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclearA coarse global PINN is first trained; its spatial residual profile is then used to place subdomain boundaries
-
IndisputableMonolith/Foundation/RealityFromDistinction.leanreality_from_one_distinction unclearRankine-Hugoniot and entropy conditions are enforced at subdomain boundaries
Reference graph
Works this paper leans on
-
[1]
Physics-informed learning for identification and state reconstruction of traffic density, in: 2021 60th IEEE Conference on Decision and Control (CDC), IEEE. pp. 2653–2658. Botvinick-Greenhouse, J., Ali, W.H., Benosman, M., Mowlavi, S.,
work page 2021
-
[2]
arXiv preprint arXiv:2510.08924
Ab- pinns: Adaptive-basis physics-informed neural networks for residual-driven domain decomposition. arXiv preprint arXiv:2510.08924 . Canepa, E.S., Claudel, C.G.,
-
[3]
Transportation Research Part B: Methodological 39, 187–196
A variational formulation of kinematic waves: basic theory and complex boundary conditions. Transportation Research Part B: Methodological 39, 187–196. doi:10.1016/j.trb.2004.04.003. Daganzo, C.F.,
-
[4]
Networks and Heterogeneous Media 1, 601–619
Onthevariationaltheoryoftrafficflow: well-posedness, duality and applications. Networks and Heterogeneous Media 1, 601–619. doi:10.3934/nhm.2006.1.601. De Ryck, T., Mishra, S., Molinaro, R.,
-
[5]
Hu, Z., Jagtap, A.D., Karniadakis, G.E., Kawaguchi, K.,
When do ex- tended physics-informed neural networks (xpinns) improve generalization? arXiv preprint arXiv:2109.09444 . Hu, Z., Jagtap, A.D., Karniadakis, G.E., Kawaguchi, K.,
-
[6]
Com- munications in Computational Physics 28, 2002–2041
Extended physics-informed neural networks (xpinns): A generalized space-time domain decomposition based deep learning framework for nonlinear partial differential equations. Com- munications in Computational Physics 28, 2002–2041. Jagtap, A.D., Kharazmi, E., Karniadakis, G.E.,
work page 2002
-
[7]
Adam: A Method for Stochastic Optimization
Adam: A method for stochastic optimization. arXiv preprint arXiv:1412.6980 . Krishnapriyan, A., Gholami, A., Zhe, S., Kirby, R., Mahoney, M.W.,
work page internal anchor Pith review Pith/arXiv arXiv
-
[8]
arXiv preprint arXiv:2505.11491
Potentialfailures of physics-informed machine learning in traffic flow modeling: theoretical and experimental analysis. arXiv preprint arXiv:2505.11491 . Lighthill, M.J., Whitham, G.B.,
-
[9]
arXiv preprint arXiv:2506.22413
Physics-informed neural networks: Bridging the divide between conser- vative and non-conservative equations. arXiv preprint arXiv:2506.22413 . Newell, G.F., 1993a. A simplified theory of kinematic waves in highway traffic, part i: General theory. Transportation Research Part B: Method- ological 27, 281–287. doi:10.1016/0191-2615(93)90038-C. Newell, G.F., ...
-
[10]
IEEETransactionsonIntelligentTransportationSystems23, 11688–11698
A physics-informed deep learning paradigm for traffic state and fundamental diagram estimation. IEEETransactionsonIntelligentTransportationSystems23, 11688–11698. doi:10.1109/TITS.2021.3106259. Shukla, K., Jagtap, A.D., Karniadakis, G.E.,
-
[11]
Department of Transportation Federal Highway Administration
Next generation simulation (ngsim) vehicle trajectories and supporting data. URL:http://doi.org/10.21949/1504477. [Dataset]. Provided by ITS DataHub through Data.transportation.gov. Accessed 2023-11-28. Wang, S., Sankaran, S., Perdikaris, P.,
-
[12]
Physics-informed deep learning for traffic state estimation based on the traffic flow model andcomputationalgraphmethod. InformationFusion101, 101971. doi:10. 1016/j.inffus.2023.101971. Zhao, C., Yu, H.,
-
[13]
IEEE Transactions on Intelligent Trans- portation Systems 25, 1602–1611
Observer-informed deep learning for traffic state es- timation with boundary sensing. IEEE Transactions on Intelligent Trans- portation Systems 25, 1602–1611. doi:10.1109/TITS.2023.3318299. 51 Appendix A. Notation Table Table A.8: Notation used in the manuscript. Symbol Description Symbol Description Traffic flow variables and domain u(x, t)Speed field (m...
-
[14]
ns Number of fixed sensors PDE, residual, and decomposition r(x, t)Normalized PDE residualnNumber of subdomains A, B, CNondimensionalization co- efficients θNetwork parameters R(x), R(t)Spatial / temporal residual profiles WFourier feature matrix nx, nt Residual evaluation grid di- mensions de Fourier embedding dimen- sion KSmoothing kernel sizeσFourier f...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.