Recognition: no theorem link
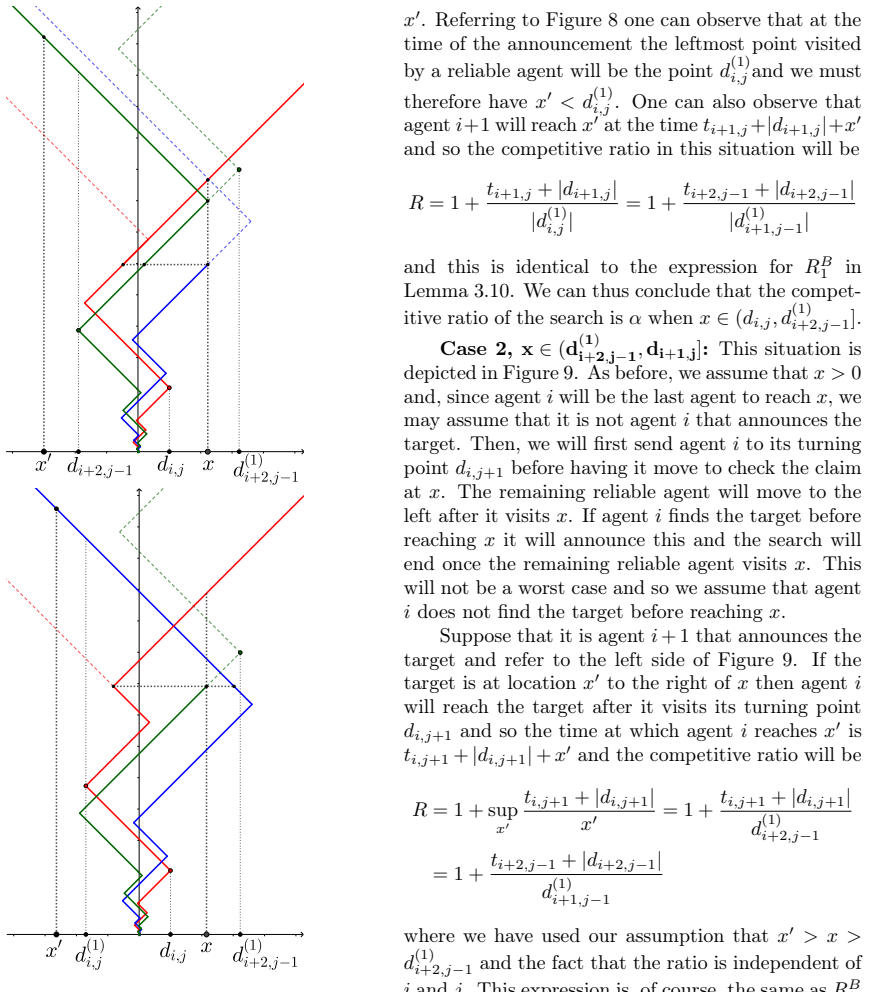
Search and evacuation with a near majority of faulty agents
Pith reviewed 2026-05-12 00:47 UTC · model grok-4.3
The pith
With one more reliable agent than twice the number of crash faults, evacuation on the line achieves competitive ratios of at most 7.437 for three agents and asymptotically 4 plus 2 times square root of 2.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
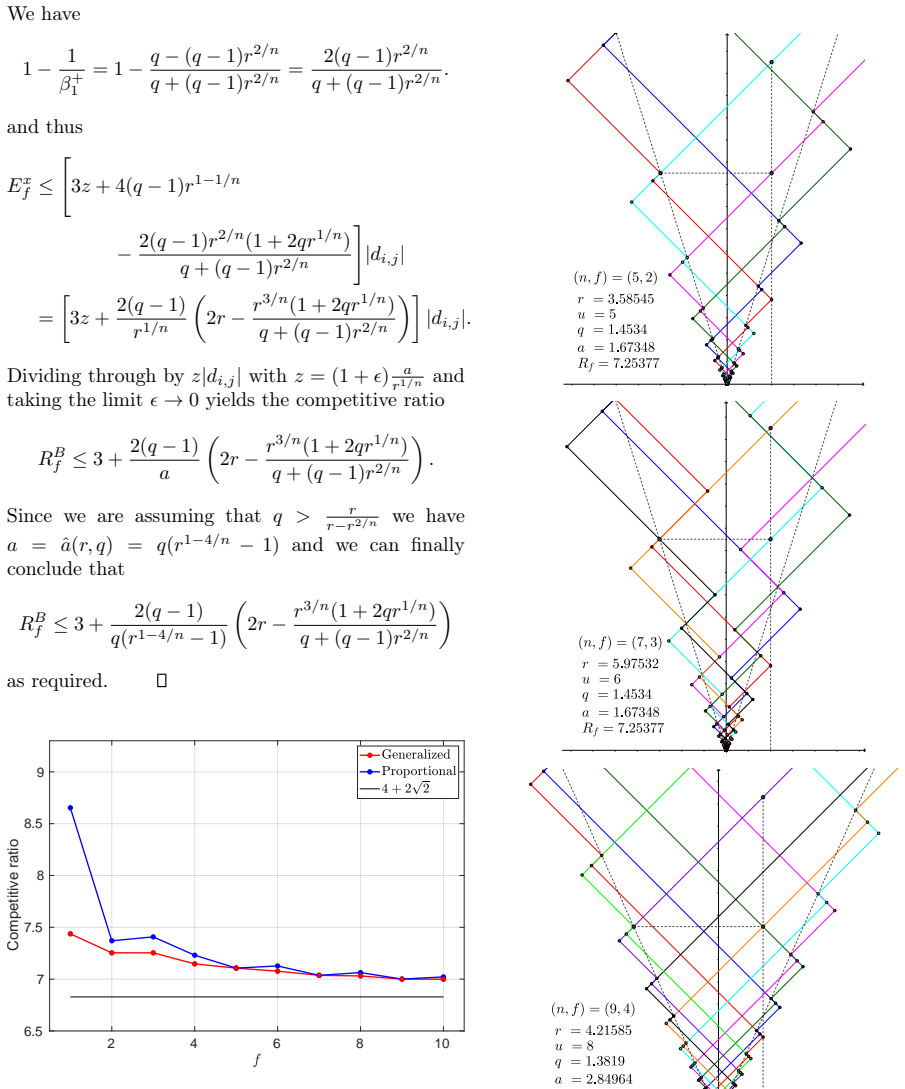
The paper claims that the new algorithm guarantees evacuation competitive ratios of at most 7.437011 for three agents with one crash fault, 7.253767 for five agents with two faults and seven agents with three faults, and 7.147026 for nine agents with four faults. For all larger n equals 2f plus 1 it proves an asymptotic upper bound of 4 plus 2 times the square root of 2. The same movement schedule, adapted for the Byzantine model, improves the upper bound for search by three agents with one lying agent from 8.653055 to 7.437011.
What carries the argument
A novel coordinated search algorithm that schedules agents to explore segments of the line in phases while relying on wireless announcements from reliable agents to trigger evacuation once the exit is located.
If this is right
- Evacuation completes in at most 7.437011 times the distance for three agents with one crash fault.
- The ratio is at most 7.253767 when five agents face two faults or seven agents face three faults.
- Nine agents with four faults evacuate in at most 7.147026 times the distance.
- As the group size grows while keeping one extra reliable agent, the ratio is at most 4 plus 2 times square root of 2.
- The same schedule yields a search competitive ratio of at most 7.437011 when one of three agents may lie about the exit.
Where Pith is reading between the lines
- The bounds indicate that the overhead from faults decreases predictably as more reliable agents are added while preserving the n equals 2f plus 1 margin.
- The coordination pattern may extend to search on a circle or in the plane when the same fault model applies.
- Real deployments would need to account for communication delays or losses not modeled here, which could increase the observed ratios.
- Verifying the ratios on concrete exit locations would show whether the upper bounds are close to tight.
Load-bearing premise
Faulty agents only omit announcements and never report false locations, and all communication is instantaneous and perfect.
What would settle it
A specific exit position on the line for which the three-agent one-fault algorithm requires more than 7.437011 times the distance to complete evacuation would refute the stated bound.
Figures





read the original abstract
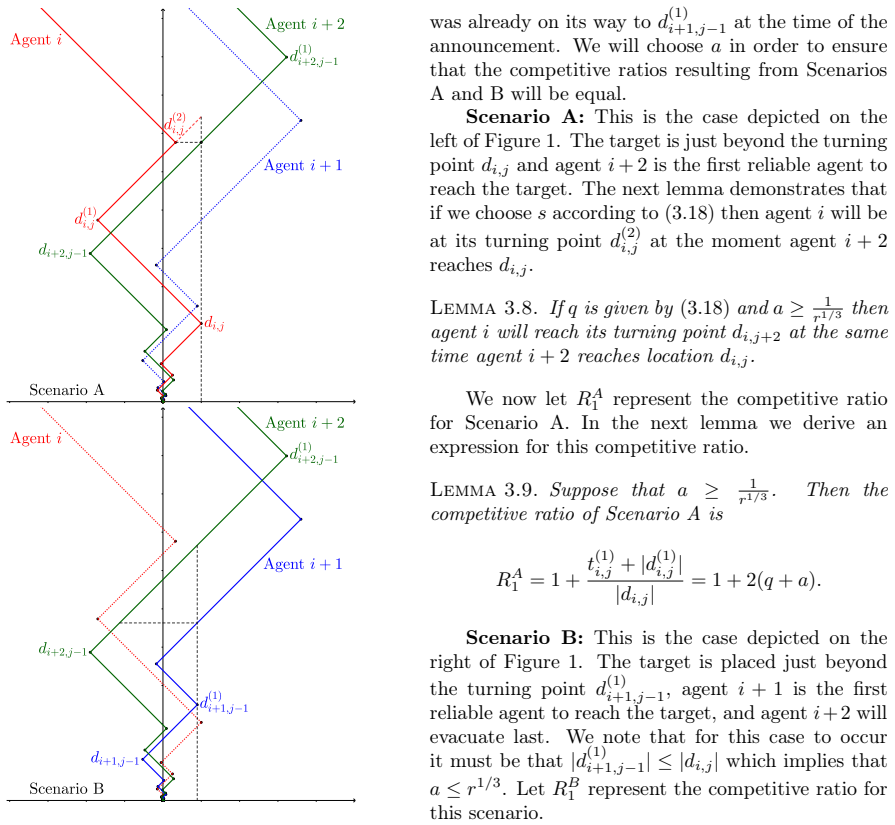
There are $n\geq 3$ unit speed mobile agents placed at the origin of the infinite line. In as little time as possible, the agents must find and evacuate from an exit placed at an initially unknown location on the line. The agents can communicate in the wireless mode in order to facilitate the evacuation (i.e. by announcing the target's location when it is found). However, among the agents are a subset of at most $f$ crash faulty agents who may fail to announce the target when they visit its location. In this paper we study this aforementioned problem for the specific case that $n=2f+1$. We introduce a novel type of search algorithm and analyze its competitive ratio -- the supremum, over all possible target locations, of the ratio of the time the agents take to evacuate divided by the initial distance between the agents and the target. In particular, we demonstrate that the competitive ratio of evacuation is at most $7.437011$ for $(n,f)=(3,1)$; at most $7.253767$ for $(n,f)=(5,2)$ and $(7,3)$; and at most $7.147026$ for $(n,f)=(9,4)$. For larger values of $n=2f+1$ we prove an asymptotic upper bound of $4+2\sqrt{2}$. We also adapt our evacuation algorithm for $(n,f)=(3,1)$ to the problem of search by three agents with one byzantine fault, i.e. the faulty agent may also lie about finding the target. In doing so we improve the best known upper bound on this search problem from 8.653055 to 7.437011.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript considers n=2f+1 unit-speed agents on the infinite line tasked with locating and evacuating via an unknown exit, where at most f agents are crash-faulty and may omit announcements. It introduces a parameterized movement strategy that partitions the line into regions, derives explicit competitive-ratio upper bounds of 7.437011 for (n,f)=(3,1), 7.253767 for (5,2) and (7,3), 7.147026 for (9,4), and 4+2√2 asymptotically for larger n, and adapts the (3,1) algorithm to improve the Byzantine-fault search bound from 8.653055 to 7.437011.
Significance. If the case analysis and numerical optimizations hold, the work supplies improved, concrete upper bounds on competitive ratio for fault-tolerant evacuation and search in the wireless model. The explicit algorithmic constructions, region-based worst-case accounting for non-announcing agents, and the constant asymptotic bound constitute a clear advance over prior results in the area.
minor comments (2)
- §3 and §4: the phase lengths and turning points that achieve the listed numerical ratios (e.g., 7.437011) are stated as optimized values; including the explicit optimization program or a short derivation appendix would make the bounds immediately reproducible without re-deriving the entire case analysis.
- Figure 2 (or equivalent diagram): the movement trajectories for the (3,1) case are described in text; a single annotated figure showing the critical turning points and announcement regions would improve readability of the worst-case timing arguments.
Simulated Author's Rebuttal
We thank the referee for their positive evaluation of our manuscript and for recommending minor revision. We appreciate the recognition of our contributions to improving the competitive ratios for fault-tolerant evacuation and search problems.
Circularity Check
No significant circularity identified
full rationale
The derivation consists of an explicit algorithmic construction for evacuation under crash faults (n=2f+1) followed by direct worst-case analysis that partitions the line into regions and bounds the evacuation time relative to the unknown exit distance, accounting for at most f non-announcing agents. The reported competitive ratios (7.437011 for (3,1), 7.253767 for (5,2) and (7,3), 7.147026 for (9,4), and the asymptotic 4+2√2) are obtained by evaluating the supremum of the ratio over all possible target locations and fault behaviors; these quantities are not fitted parameters renamed as predictions, nor do they reduce to self-definitions or load-bearing self-citations. The adaptation to the Byzantine search variant similarly applies the same strategy and recomputes the bound independently. The paper is self-contained against external benchmarks.
Axiom & Free-Parameter Ledger
free parameters (1)
- phase lengths and turning points in the search strategy
axioms (2)
- domain assumption All agents move at identical unit speed on the infinite line
- domain assumption Wireless announcements are instantaneous and error-free when made by reliable agents
Reference graph
Works this paper leans on
-
[1]
S. Albers and M. R. Henzinger. Exploring un- known environments.SIAM Journal on Computing, 29(4):1164–1188, 2000
work page 2000
- [2]
-
[3]
R. Baeza-Yates, J. Culberson, and G. Rawlins. Searching in the plane.Information and Compu- tation, 106(2):234–252, 1993
work page 1993
-
[4]
R. Baeza-Yates and R. Schott. Parallel searching in the plane.Computational Geometry, 5(3):143–154, 1995
work page 1995
- [5]
-
[6]
A. Beck. On the linear search problem.Israel J. of Mathematics, 2(4):221–228, 1964
work page 1964
-
[7]
A. Beck. More on the linear search problem.Israel J. of Mathematics, 3(2):61–70, 1965
work page 1965
-
[8]
A. Beck and D. Newman. Yet more on the linear search problem.Israel J. of Mathematics, 8(4):419– 429, 1970
work page 1970
-
[9]
R. Bellman. An optimal search.SIAM Review, 5(3):274–274, 1963
work page 1963
-
[10]
M. Chrobak, L. Gąsieniec, Gorry T., and R. Martin. Group search on the line. InSOFSEM 2015, pages 164–176, Sněžkou, Czech Republic, 2015. Springer
work page 2015
-
[11]
J. Czyzowicz, K. Georgiou, R. Killick, E. Kranakis, D. Krizanc, M. Lafond, L. Narayanan, J. Opatrny, and S. Shende. Energy consumption of group search on a line. InICALP 2019, pages 137:1–137:15, Patras, Greece, 2019. LIPIcs
work page 2019
-
[12]
J. Czyzowicz, K. Georgiou, R. Killick, E. Kranakis, D. Krizanc, M. Lafond, L. Narayanan, J. Opatrny, and S. Shende. Time-energy tradeoffs for evacuation by two robots in the wireless model.Theoretical Computer Science, 852:61–72, 2021
work page 2021
-
[13]
J. Czyzowicz, K. Georgiou, E. Kranakis, D. Krizanc, L. Narayanan, J. Opatrny, and S. Shende. Search on a line by byzantine robots. InISAAC 2016, pages 27:1–27:12, Toronto, Canada, 2016. LIPIcs
work page 2016
-
[14]
J. Czyzowicz, R. Killick, E. Kranakis, and G. Sta- chowiak. Search and evacuation with a near major- ity of faulty agents. InSIAM Conference on Applied and Computational Discrete Algorithms (ACDA21), pages 217–227. SIAM, January 2021
work page 2021
-
[15]
J. Czyzowicz, E. Kranakis, D. Krizanc, L. Narayanan, and Opatrny J. Search on a line with faulty robots. InPODC 2016, pages 405–414, Chicago, Illinois, 2016. ACM
work page 2016
-
[16]
E.D. Demaine, S.P. Fekete, and S. Gal. Online searching with turn cost.Theoretical Computer Science, 361(2):342–355, 2006
work page 2006
-
[17]
X. Deng, T. Kameda, and C. Papadimitriou. How to learn an unknown environment. InFOCS 1991, pages 298–303. IEEE, 1991
work page 1991
-
[18]
Hideandseekinasubsetoftherealline
B.Fristedt. Hideandseekinasubsetoftherealline. International Journal of Game Theory, 6(3):135– 165, 1977
work page 1977
-
[19]
B. Fristedt and D. Heath. Searching for a particle on the real line.Advances in Applied Probability, 6(1):79–102, 1974
work page 1974
-
[20]
S. Gal. A general search game.Israel Journal of Mathematics, 12(1):32–45, 1972
work page 1972
-
[21]
F. Hoffmann, C. Icking, R. Klein, and K. Kriegel. The polygon exploration problem.SIAM Journal on Computing, 31(2):577–600, 2001
work page 2001
-
[22]
A. Kupavskii and E. Welzl. Lower bounds for searching robots, some faulty. InPODC 2018, pages 447–453, Egham, United Kingdom, 2018. ACM
work page 2018
-
[23]
X. Sun, Y. Sun, and J. Zhang. Better upper boundsforsearchingonalinewithbyzantinerobots. InComplexity and Approximation, pages 151–171. Springer, 2020. A Proofs missing from Subsection 1.2 Proof.(Lemma 1.1) Consider an evacuation algo- rithm defined by turning point trajectories. Suppose that the competitive ratio of this algorithm isαand consider a locat...
work page 2020
-
[24]
Taking the positive root (sincer >1) and substituting this into the expression for ˆRyields ˆR= 7− 4 √ 2 (3 + 2 √ 2)2 −1 = 7− 4 √ 2 16 + 12 √ 2 = 7− 1 2 √ 2 + 3 = 7− 3−2 √ 2 (2 √ 2 + 3)(3−2 √ 2) = 7−(3−2 √
-
[25]
= 4 + 2 √ 2. 2 4 6 8 106.5 7 7.5 8 8.5 9 Competitive ratio Figure 4: The competitive ratio as a function of the number of faultsffor the proportional schedule algorithm. The blue line indicates the optimized competitive ratio; the red lines indicate the bounds of Theorem 2.1; the green line indicates the competitive ratio of evacuation when we chooserto o...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.