Recognition: no theorem link
SYNCR: A Cross-Video Reasoning Benchmark with Synthetic Grounding
Pith reviewed 2026-05-12 00:48 UTC · model grok-4.3
The pith
Current MLLMs reach only 52.5 percent accuracy on cross-video reasoning tasks compared to an 89.5 percent human baseline.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
SYNCR supplies 8,163 multi-video question-answer pairs across 9,650 unique synthetic videos, each with programmatically verified grounding, to diagnose MLLM capabilities on four diagnostic pillars. The best evaluated model attains 52.5 percent average accuracy while humans reach 89.5 percent, performing adequately on temporal ordering yet only 26.0 percent on kinematic comparison. Parameter scaling and reasoning post-training strengthen temporal alignment but do not consistently improve physical tracking or global spatial synthesis. Exploratory analysis indicates several SYNCR tasks track model-level trends on existing real-world multi-video benchmarks.
What carries the argument
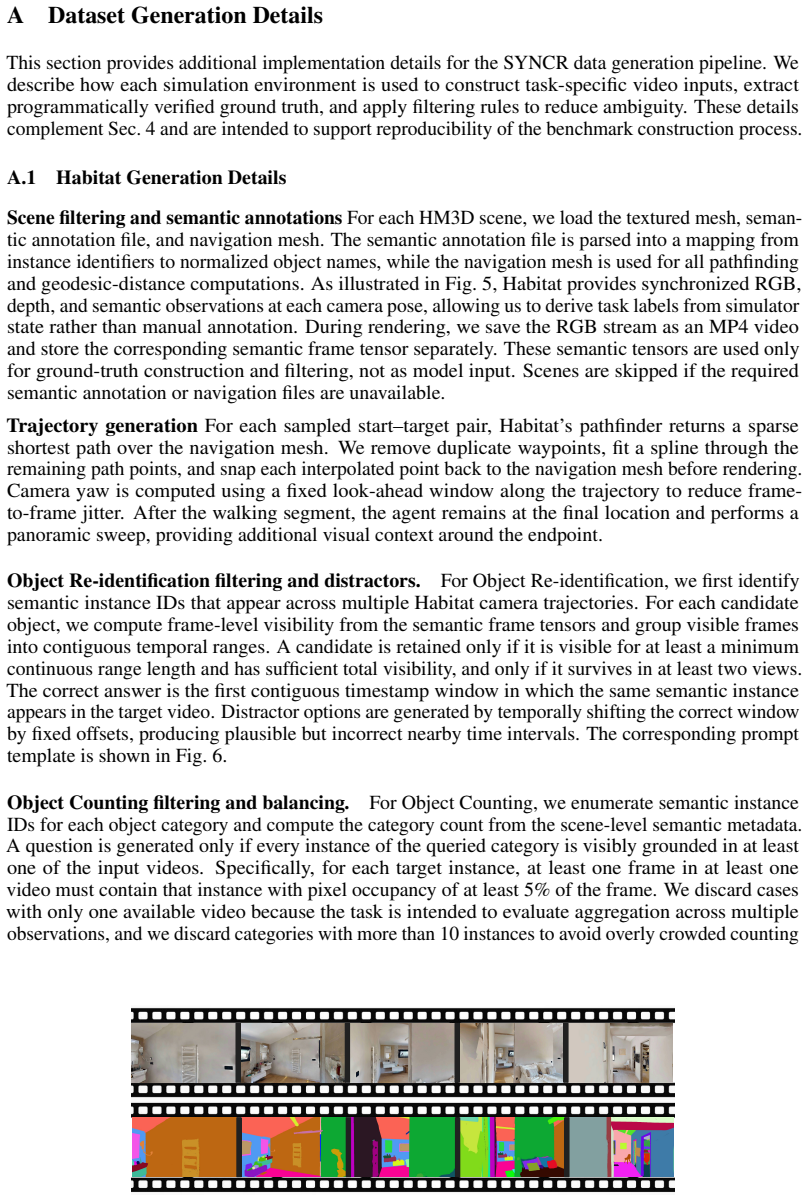
The SYNCR benchmark, which generates synthetic videos via Habitat, Kubric, and CLEVRER simulators and supplies programmatically verified ground truth for eight cross-video tasks.
Load-bearing premise
The synthetic videos and programmatically defined tasks accurately capture the core reasoning challenges that arise in real-world multi-video scenarios.
What would settle it
Demonstrating that models scoring high on SYNCR perform poorly on real-world multi-video benchmarks, or that human accuracy on SYNCR fails to predict human accuracy on equivalent real footage, would undermine the benchmark's claimed diagnostic value.
Figures










read the original abstract
Multimodal Large Language Models (MLLMs) have made rapid progress in single-video understanding, yet their ability to reason across multiple independent video streams remains poorly understood. Existing multi-video benchmarks rely largely on human-annotated real-world footage, limiting the precision of spatial, temporal, and physical ground truth and making it difficult to diagnose model failures. We introduce SYNCR, a controlled synthetic benchmark for cross-video reasoning with programmatically verified grounding. Built using Habitat, Kubric, and CLEVRER simulator engines, SYNCR contains 8,163 multi-video question-answer pairs grounded in 9,650 unique videos. It evaluates MLLMs across eight tasks spanning four diagnostic pillars: Temporal Alignment, Spatial Tracking, Comparative Reasoning, and Holistic Synthesis. Our zero-shot evaluation of leading open- and closed-weight MLLMs reveals a substantial gap between current models and humans: the best model achieves only 52.5% average accuracy, compared to an 89.5% human baseline. Models perform relatively well on temporal ordering but struggle with precise physical and spatial reasoning, with the best model reaching only 26.0% accuracy on Kinematic Comparison. We further find that parameter scaling and reasoning-specialized post-training improve temporal alignment capabilities, but do not reliably address fine-grained physical tracking or global spatial synthesis. Finally, an exploratory sim-to-real correlation analysis suggests that several SYNCR tasks track model-level trends on real-world multi-video benchmarks, while also exposing reasoning capabilities underrepresented by existing evaluations. Code available at https://github.com/SaraGhazanfari/SYNCR.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper introduces SYNCR, a synthetic benchmark for cross-video reasoning in MLLMs consisting of 8,163 programmatically verified QA pairs grounded in 9,650 videos generated via Habitat, Kubric, and CLEVRER engines. It defines eight tasks across four pillars (Temporal Alignment, Spatial Tracking, Comparative Reasoning, Holistic Synthesis) and reports zero-shot evaluations of leading MLLMs, with the best model at 52.5% average accuracy versus an 89.5% human baseline; models perform better on temporal ordering but poorly on physical/spatial tasks (e.g., 26.0% on Kinematic Comparison). The work also examines scaling and post-training effects and includes an exploratory sim-to-real correlation analysis linking several tasks to real multi-video trends.
Significance. If the synthetic construction and verification hold, SYNCR provides a controlled, scalable alternative to human-annotated real-world multi-video benchmarks, enabling precise isolation of reasoning failures in temporal, spatial, and physical domains that are difficult to diagnose otherwise. The reported 52.5% vs. 89.5% gap, task-specific breakdowns, and observation that scaling helps temporal alignment but not fine-grained tracking are actionable for model development. The public code release and sim-to-real exploratory analysis are strengths that support reproducibility and relevance.
major comments (2)
- [Evaluation section] Evaluation section: The central claim of a substantial gap (52.5% best-model average vs. 89.5% human) and the 26.0% Kinematic Comparison result depend on the zero-shot protocol; the manuscript must detail how multiple independent video streams are tokenized and presented to each MLLM (e.g., concatenation order, frame sampling, prompt templates) because input formatting choices can confound whether the gap reflects reasoning deficits or interface limitations.
- [Benchmark construction] Benchmark construction and task definitions: Programmatic verification across simulators is a key strength, yet the paper needs explicit pseudocode or rule sets for generating ground truth in the more complex pillars (Comparative Reasoning and Holistic Synthesis) to confirm that the tasks do not admit unintended shortcuts that models could exploit without true cross-video reasoning.
minor comments (3)
- [Abstract] Abstract: The statement that 'code available at https://github.com/SaraGhazanfari/SYNCR' should be accompanied by a note on whether the generated videos and QA pairs are also released, as this directly affects the benchmark's utility to the community.
- [Related work] Related work: The positioning against existing multi-video benchmarks would benefit from a table comparing scale, grounding precision, and task coverage rather than narrative description alone.
- [Figures] Figures and tables: Task example visualizations should explicitly annotate which video stream corresponds to which question component to improve readability when readers compare model failures across pillars.
Simulated Author's Rebuttal
We thank the referee for the positive assessment and recommendation for minor revision. The comments identify opportunities to strengthen clarity in the evaluation protocol and benchmark details, which we address point by point below.
read point-by-point responses
-
Referee: [Evaluation section] Evaluation section: The central claim of a substantial gap (52.5% best-model average vs. 89.5% human) and the 26.0% Kinematic Comparison result depend on the zero-shot protocol; the manuscript must detail how multiple independent video streams are tokenized and presented to each MLLM (e.g., concatenation order, frame sampling, prompt templates) because input formatting choices can confound whether the gap reflects reasoning deficits or interface limitations.
Authors: We agree that a complete specification of the zero-shot input protocol is necessary to support the reported performance gap. The original manuscript outlines the overall zero-shot setup and model inputs at a high level but does not enumerate the precise formatting choices. In the revised manuscript we will expand the Evaluation section with a new subsection that specifies: (i) concatenation order (Video 1 followed by Video 2 with an explicit separator token), (ii) frame sampling (uniform sampling of at most 8 frames per video at 1 FPS, each resized to the model's native resolution), and (iii) the exact prompt templates used for each task family. These choices were held constant across all evaluated models. Adding this information will make clear that the observed deficits arise from reasoning limitations rather than interface artifacts. revision: yes
-
Referee: [Benchmark construction] Benchmark construction and task definitions: Programmatic verification across simulators is a key strength, yet the paper needs explicit pseudocode or rule sets for generating ground truth in the more complex pillars (Comparative Reasoning and Holistic Synthesis) to confirm that the tasks do not admit unintended shortcuts that models could exploit without true cross-video reasoning.
Authors: We concur that explicit rule sets for the more involved pillars improve transparency and help readers verify the absence of shortcuts. The original manuscript describes the overall programmatic verification pipeline and the four pillars at the task level but does not include pseudocode for Comparative Reasoning and Holistic Synthesis. In the revision we will add concise pseudocode and rule descriptions for these pillars (e.g., velocity-vector extraction and magnitude comparison for Kinematic Comparison; cross-video spatial-relation aggregation for Holistic Synthesis) in the Methods section or an appendix. Because the released code already implements these exact rules, the added text will simply make the paper self-contained while confirming that each task requires genuine integration of information across independent videos. revision: yes
Circularity Check
No significant circularity
full rationale
This is an empirical benchmark creation and evaluation paper. It programmatically generates synthetic multi-video QA pairs using Habitat, Kubric, and CLEVRER simulators, evaluates leading MLLMs in zero-shot settings, and reports direct accuracy numbers against a human baseline (52.5% vs 89.5%). No mathematical derivations, fitted parameters, self-referential predictions, or load-bearing self-citations appear in the described content. The exploratory sim-to-real correlation is presented as supplementary observation rather than a deductive step that reduces to the paper's own inputs. The central claims rest on external model evaluations and human annotations, not on any internal redefinition or construction that would qualify as circular under the enumerated patterns.
Axiom & Free-Parameter Ledger
axioms (1)
- domain assumption Simulator engines (Habitat, Kubric, CLEVRER) produce accurate and verifiable spatial, temporal, and physical properties for multi-video scenarios.
Reference graph
Works this paper leans on
-
[1]
Shuai Bai, Yuxuan Cai, Ruizhe Chen, Keqin Chen, Xionghui Chen, Zesen Cheng, Lianghao Deng, Wei Ding, Chang Gao, Chunjiang Ge, et al. Qwen3-vl technical report.arXiv preprint arXiv:2511.21631, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Shuai Bai, Keqin Chen, Xuejing Liu, Jialin Wang, Wenbin Ge, Sibo Song, Kai Dang, Peng Wang, Shijie Wang, Jun Tang, Humen Zhong, Yuanzhi Zhu, Mingkun Yang, Zhaohai Li, Jianqiang Wan, Pengfei Wang, Wei Ding, Zheren Fu, Yiheng Xu, Jiabo Ye, Xi Zhang, Tianbao Xie, Zesen Cheng, Hang Zhang, Zhibo Yang, Haiyang Xu, and Junyang Lin. Qwen2.5-vl technical report.ar...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[3]
Video-mme: The first-ever comprehensive evaluation benchmark of multi-modal llms in video analysis
Chaoyou Fu, Yuhan Dai, Yongdong Luo, Lei Li, Shuhuai Ren, Renrui Zhang, Zihan Wang, Chenyu Zhou, Yunhang Shen, Mengdan Zhang, et al. Video-mme: The first-ever comprehensive evaluation benchmark of multi-modal llms in video analysis. InProceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 24108–24118, 2025
work page 2025
-
[4]
Emma: Efficient visual alignment in multi-modal llms.arXiv preprint arXiv:2410.02080, 2024
Sara Ghazanfari, Alexandre Araujo, Prashanth Krishnamurthy, Siddharth Garg, and Farshad Khorrami. Emma: Efficient visual alignment in multi-modal llms.arXiv preprint arXiv:2410.02080, 2024
-
[5]
Sara Ghazanfari, Siddharth Garg, Nicolas Flammarion, Prashanth Krishnamurthy, Farshad Khorrami, and Francesco Croce. Towards unified benchmark and models for multi-modal perceptual metrics.arXiv preprint arXiv:2412.10594, 2024
-
[6]
Chain-of-Frames: Advancing Video Understanding in Multimodal LLMs via Frame-Aware Reasoning
Sara Ghazanfari, Francesco Croce, Nicolas Flammarion, Prashanth Krishnamurthy, Farshad Khorrami, and Siddharth Garg. Chain-of-frames: Advancing video understanding in multimodal llms via frame-aware reasoning.arXiv preprint arXiv:2506.00318, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[7]
On the binding problem in artificial neural networks.arXiv preprint arXiv:2012.05208, 2020
Klaus Greff, Sjoerd Van Steenkiste, and Jürgen Schmidhuber. On the binding problem in artificial neural networks.arXiv preprint arXiv:2012.05208, 2020
-
[8]
Kubric: A scalable dataset generator
Klaus Greff, Francois Belletti, Lucas Beyer, Carl Doersch, Yilun Du, Daniel Duckworth, David J Fleet, Dan Gnanapragasam, Florian Golemo, Charles Herrmann, et al. Kubric: A scalable dataset generator. In Proceedings of the IEEE/CVF conference on computer vision and pattern recognition, pages 3749–3761, 2022
work page 2022
-
[9]
Lift-attend-splat: Bird’s-eye-view camera-lidar fusion using transformers
James Gunn, Zygmunt Lenyk, Anuj Sharma, Andrea Donati, Alexandru Buburuzan, John Redford, and Romain Mueller. Lift-attend-splat: Bird’s-eye-view camera-lidar fusion using transformers. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 4526–4536, 2024
work page 2024
-
[10]
David Ha and Jürgen Schmidhuber. World models.arXiv preprint arXiv:1803.10122, 2(3):440, 2018
work page internal anchor Pith review Pith/arXiv arXiv 2018
-
[11]
Michael D Kirchhoff and Julian Kiverstein.Extended consciousness and predictive processing: A third wave view. Routledge, 2019
work page 2019
-
[12]
A path towards autonomous machine intelligence version 0.9
Yann LeCun et al. A path towards autonomous machine intelligence version 0.9. 2, 2022-06-27.Open Review, 62(1):1–62, 2022
work page 2022
-
[13]
LLaVA-OneVision: Easy Visual Task Transfer
Bo Li, Yuanhan Zhang, Dong Guo, Renrui Zhang, Feng Li, Hao Zhang, Kaichen Zhang, Peiyuan Zhang, Yanwei Li, Ziwei Liu, et al. Llava-onevision: Easy visual task transfer.arXiv preprint arXiv:2408.03326, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[14]
Jingyao Li, Jingyun Wang, Molin Tan, Haochen Wang, Cilin Yan, Likun Shi, Jiayin Cai, Xiaolong Jiang, and Yao Hu. Crossvid: A comprehensive benchmark for evaluating cross-video reasoning in multimodal large language models. InProceedings of the AAAI Conference on Artificial Intelligence, pages 6244–6252, 2026
work page 2026
-
[15]
Mvbench: A comprehensive multi-modal video understanding benchmark
Kunchang Li, Yali Wang, Yinan He, Yizhuo Li, Yi Wang, Yi Liu, Zun Wang, Jilan Xu, Guo Chen, Ping Luo, et al. Mvbench: A comprehensive multi-modal video understanding benchmark. InProceedings of the IEEE/CVF Conference on Computer Vision and Pattern Recognition, pages 22195–22206, 2024. 10
work page 2024
-
[16]
Zhiqi Li, Wenhai Wang, Hongyang Li, Enze Xie, Chonghao Sima, Tong Lu, Qiao Yu, and Jifeng Dai. Bevformer: Learning bird’s-eye-view representation from multi-camera images via spatiotemporal trans- formers.(2022).URL https://arxiv. org/abs/2203.17270, 10, 2022
-
[17]
Tianhao Peng, Haochen Wang, Yuanxing Zhang, Zekun Wang, Zili Wang, Gavin Chang, Jian Yang, Shihao Li, Yanghai Wang, Xintao Wang, et al. Mvu-eval: Towards multi-video understanding evaluation for multimodal llms.arXiv preprint arXiv:2511.07250, 2025
-
[18]
arXiv preprint arXiv:2310.13724 (2023) 14
Xavier Puig, Eric Undersander, Andrew Szot, Mikael Dallaire Cote, Tsung-Yen Yang, Ruslan Partsey, Ruta Desai, Alexander William Clegg, Michal Hlavac, So Yeon Min, et al. Habitat 3.0: A co-habitat for humans, avatars and robots.arXiv preprint arXiv:2310.13724, 2023
-
[19]
Habitat-Matterport 3D Dataset (HM3D): 1000 Large-scale 3D Environments for Embodied AI
Santhosh K Ramakrishnan, Aaron Gokaslan, Erik Wijmans, Oleksandr Maksymets, Alex Clegg, John Turner, Eric Undersander, Wojciech Galuba, Andrew Westbury, Angel X Chang, et al. Habitat-matterport 3d dataset (hm3d): 1000 large-scale 3d environments for embodied ai.arXiv preprint arXiv:2109.08238, 2021
work page internal anchor Pith review arXiv 2021
-
[20]
Adam Santoro, David Raposo, David G Barrett, Mateusz Malinowski, Razvan Pascanu, Peter Battaglia, and Timothy Lillicrap. A simple neural network module for relational reasoning.Advances in neural information processing systems, 30, 2017
work page 2017
-
[21]
Habitat: A platform for embodied ai research
Manolis Savva, Abhishek Kadian, Oleksandr Maksymets, Yili Zhao, Erik Wijmans, Bhavana Jain, Julian Straub, Jia Liu, Vladlen Koltun, Jitendra Malik, et al. Habitat: A platform for embodied ai research. In Proceedings of the IEEE/CVF international conference on computer vision, pages 9339–9347, 2019
work page 2019
-
[22]
Aaditya Singh, Adam Fry, Adam Perelman, Adam Tart, Adi Ganesh, Ahmed El-Kishky, Aidan McLaugh- lin, Aiden Low, AJ Ostrow, Akhila Ananthram, et al. Openai gpt-5 system card.arXiv preprint arXiv:2601.03267, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[23]
Core knowledge.Developmental science, 10(1):89–96, 2007
Elizabeth S Spelke and Katherine D Kinzler. Core knowledge.Developmental science, 10(1):89–96, 2007
work page 2007
-
[24]
Andrew Szot, Alexander Clegg, Eric Undersander, Erik Wijmans, Yili Zhao, John Turner, Noah Maestre, Mustafa Mukadam, Devendra Singh Chaplot, Oleksandr Maksymets, et al. Habitat 2.0: Training home assistants to rearrange their habitat.Advances in neural information processing systems, 34:251–266, 2021
work page 2021
-
[25]
Gemini: A Family of Highly Capable Multimodal Models
Gemini Team, Rohan Anil, Sebastian Borgeaud, Jean-Baptiste Alayrac, Jiahui Yu, Radu Soricut, Johan Schalkwyk, Andrew M Dai, Anja Hauth, Katie Millican, et al. Gemini: a family of highly capable multimodal models.arXiv preprint arXiv:2312.11805, 2023
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[26]
Pauli Virtanen, Ralf Gommers, Travis E Oliphant, Matt Haberland, Tyler Reddy, David Cournapeau, Evgeni Burovski, Pearu Peterson, Warren Weckesser, Jonathan Bright, et al. Scipy 1.0: fundamental algorithms for scientific computing in python.Nature methods, 17(3):261–272, 2020
work page 2020
-
[27]
InternVL3.5: Advancing Open-Source Multimodal Models in Versatility, Reasoning, and Efficiency
Weiyun Wang, Zhangwei Gao, Lixin Gu, Hengjun Pu, Long Cui, Xingguang Wei, Zhaoyang Liu, Linglin Jing, Shenglong Ye, Jie Shao, et al. Internvl3. 5: Advancing open-source multimodal models in versatility, reasoning, and efficiency.arXiv preprint arXiv:2508.18265, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[28]
Multi-camera spatio-temporal fusion and biased sequence-data learning for security surveillance
Gang Wu, Yi Wu, Long Jiao, Yuan-Fang Wang, and Edward Y Chang. Multi-camera spatio-temporal fusion and biased sequence-data learning for security surveillance. InProceedings of the eleventh ACM international conference on Multimedia, pages 528–538, 2003
work page 2003
-
[29]
Haoning Wu, Dongxu Li, Bei Chen, and Junnan Li. Longvideobench: A benchmark for long-context interleaved video-language understanding.Advances in Neural Information Processing Systems, 37: 28828–28857, 2024
work page 2024
-
[30]
arXiv preprint arXiv:2404.16994 , year=
Lin Xu, Yilin Zhao, Daquan Zhou, Zhijie Lin, See Kiong Ng, and Jiashi Feng. Pllava: Parameter-free llava extension from images to videos for video dense captioning.arXiv preprint arXiv:2404.16994, 2024
-
[31]
Clevrer: Collision events for video representation and reasoning
Kexin Yi, Chuang Gan, Yunzhu Li, Pushmeet Kohli, Jiajun Wu, Antonio Torralba, and Joshua B Tenenbaum. Clevrer: Collision events for video representation and reasoning.arXiv preprint arXiv:1910.01442, 2019
-
[32]
MLVU: Benchmarking Multi-task Long Video Understanding
Junjie Zhou, Yan Shu, Bo Zhao, Boya Wu, Shitao Xiao, Xi Yang, Yongping Xiong, Bo Zhang, Tiejun Huang, and Zheng Liu. Mlvu: A comprehensive benchmark for multi-task long video understanding.arXiv preprint arXiv:2406.04264, 2(5):6, 2024
work page internal anchor Pith review arXiv 2024
-
[33]
Nannan Zhu, Yonghao Dong, Teng Wang, Xueqian Li, Shengjun Deng, Yijia Wang, Zheng Hong, Tiantian Geng, Guo Niu, Hanyan Huang, et al. Cvbench: Benchmarking cross-video synergies for complex multimodal reasoning.arXiv preprint arXiv:2508.19542, 2025. 11 A Dataset Generation Details This section provides additional implementation details for the SYNCR data g...
-
[34]
most and second most have the same number of collisions – 0
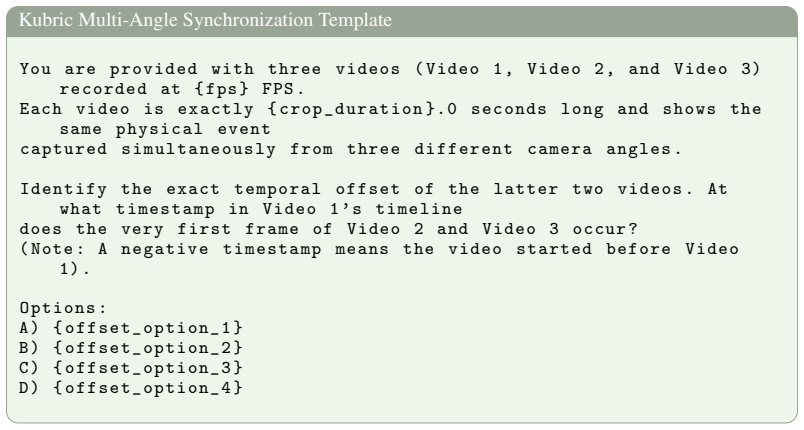
Options : A ) { o f f s e t _ o p t i o n _ 1 } B ) { o f f s e t _ o p t i o n _ 2 } C ) { o f f s e t _ o p t i o n _ 3 } D ) { o f f s e t _ o p t i o n _ 4 } Figure 9:Kubric Multi-Angle Synchronization prompt template.The model is given three cropped videos of the same physical event from different camera angles and must infer the temporal offsets of ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.