Recognition: 2 theorem links
· Lean TheoremCollabVR: Collaborative Video Reasoning with Vision-Language and Video Generation Models
Pith reviewed 2026-05-12 02:13 UTC · model grok-4.3
The pith
Step-level checks by a vision-language model on each clip generated by a video model improve visual reasoning over single-pass and scaling baselines.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
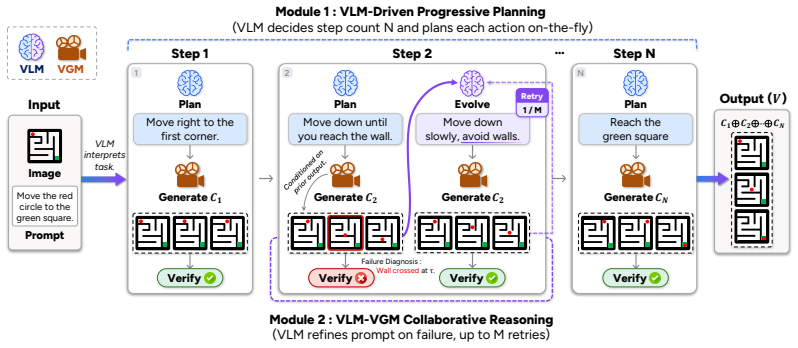
CollabVR couples a vision-language model and a video generation model in a closed loop at step-level granularity: the VLM plans the immediate next action, the VGM generates the corresponding short clip, and the VLM inspects that clip to diagnose failures before folding the diagnosis into the next action prompt. On two visual reasoning benchmarks this procedure improves both open- and closed-source VGMs over single-inference, Pass@k sampling, and prior test-time scaling baselines at matched compute, with the biggest lifts on the hardest tasks and additional gains on top of a reasoning-fine-tuned VGM.
What carries the argument
The step-level closed-loop collaboration where the VLM plans the next action, the VGM renders a short clip, and the VLM diagnoses errors in the clip to repair the subsequent prompt.
If this is right
- Improves performance of both open-source and closed-source VGMs over single-inference, Pass@k, and prior test-time scaling baselines at matched compute.
- Delivers the largest gains on the hardest tasks.
- Produces further improvements when applied on top of a reasoning-fine-tuned VGM.
- The step-level VLM supervision is orthogonal to and stackable with reasoning-oriented fine-tuning.
Where Pith is reading between the lines
- The same pattern of immediate diagnostic feedback could be applied to other generative tasks where short-horizon models drift over long sequences.
- If the VLM inspection can be automated or distilled, the framework might scale to real-time applications such as robotic planning.
- This highlights an alternative to full model retraining by using one model type to compensate for the limitations of another at inference time.
Load-bearing premise
The vision-language model can accurately inspect the generated short clips and produce reliable diagnoses that repair failures without introducing new errors.
What would settle it
Run the method and a matched-compute single-inference baseline on a new long-horizon benchmark while separately measuring how often the VLM's clip diagnoses are correct; if diagnosis accuracy is low, the performance edge should disappear.
Figures

















read the original abstract
Recent "Thinking with Video" approaches use Video Generation Models (VGMs) for visual reasoning by producing temporally coherent Chain-of-Frames as reasoning artifacts. Even strong VGMs, however, exhibit two recurring failure modes on goal-directed tasks: long-horizon drift on multi-step tasks and mid-clip simulation errors that compound. Both stem from the absence of explicit reasoning built upon the VGM's short-horizon visual prior, a role naturally filled by Vision-Language Models (VLMs), but where to place the VLM is non-trivial: upfront plans commit before any frame is generated and post-hoc critiques over whole videos intervene too late. We propose VLM-VGM Collaborative Video Reasoning (CollabVR), a closed-loop framework that couples the VLM with the VGM at step-level granularity: the VLM plans the immediate next action, inspects the clip the VGM generates, and folds the verifier's diagnosis directly into the next action prompt to repair detected failures. On Gen-ViRe and VBVR-Bench, CollabVR improves both open-source and closed-source VGMs over single-inference, Pass@$k$, and prior test-time scaling baselines at matched compute, with the largest gains on the hardest tasks. It also yields further improvements on top of a reasoning-fine-tuned VGM, indicating that step-level VLM supervision is orthogonal to and stackable with reasoning-oriented fine-tuning. We provide video samples and additional qualitative results at our project page: https://joow0n-kim.github.io/collabvr-project-page.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The paper proposes CollabVR, a closed-loop collaborative framework for video reasoning that interleaves a VLM for step-level planning and diagnosis with a VGM for short-clip generation. The VLM plans the immediate next action, the VGM produces a clip, and the VLM inspects the result to fold failure diagnoses into the subsequent prompt, aiming to mitigate long-horizon drift and mid-clip simulation errors. The authors claim that this yields consistent gains over single-inference, Pass@k, and prior test-time scaling baselines on Gen-ViRe and VBVR-Bench at matched compute (largest on hardest tasks) and stacks with reasoning fine-tuning of the VGM.
Significance. If the gains are attributable to the step-level feedback loop rather than extra inference or prompt engineering, the work would be significant for hybrid VLM-VGM reasoning systems. It offers a concrete mechanism to leverage the VLM's reasoning strengths without upfront commitment or post-hoc whole-video critique, and the reported orthogonality to fine-tuning suggests a path for combining test-time collaboration with training-based improvements. The absence of supporting experimental details in the provided description, however, limits assessment of whether these benefits are realized.
major comments (2)
- [Experimental Results (Gen-ViRe and VBVR-Bench evaluations)] The central empirical claim (improvements over Pass@k and test-time scaling at matched compute, especially on hardest tasks) is load-bearing for the paper's contribution, yet the abstract and available description supply no ablation studies isolating the closed-loop VLM diagnosis step, no statistical significance tests, and no error analysis of diagnosis accuracy or false-positive repair rates. Without these, attribution to the collaborative mechanism versus additional VLM calls remains unverified.
- [Method (closed-loop collaboration description)] The framework's effectiveness rests on the assumption that VLM inspection of short clips produces accurate, corrective diagnoses that repair VGM failures without introducing or compounding errors in subsequent planning steps. No quantitative breakdown of diagnosis accuracy, cases of error amplification, or comparison of repair success versus failure modes is provided, which directly affects the claim that the loop mitigates mid-clip simulation errors.
Simulated Author's Rebuttal
We thank the referee for the constructive feedback and for acknowledging the potential significance of step-level VLM-VGM collaboration. We address the two major comments below and will revise the manuscript to incorporate the requested analyses.
read point-by-point responses
-
Referee: The central empirical claim (improvements over Pass@k and test-time scaling at matched compute, especially on hardest tasks) is load-bearing for the paper's contribution, yet the abstract and available description supply no ablation studies isolating the closed-loop VLM diagnosis step, no statistical significance tests, and no error analysis of diagnosis accuracy or false-positive repair rates. Without these, attribution to the collaborative mechanism versus additional VLM calls remains unverified.
Authors: We agree that explicit isolation of the closed-loop diagnosis is necessary to strengthen attribution. While our Pass@k and test-time scaling baselines already control for total VLM calls and compute, we will add a dedicated ablation that disables the diagnosis/repair feedback (replacing it with neutral prompts) while preserving the same VLM call budget. We will also report statistical significance via multiple random seeds and include an error analysis of diagnosis accuracy plus false-positive repair rates, obtained through human annotation of sampled trajectories. These additions will appear in the revised main paper and appendix. revision: yes
-
Referee: The framework's effectiveness rests on the assumption that VLM inspection of short clips produces accurate, corrective diagnoses that repair VGM failures without introducing or compounding errors in subsequent planning steps. No quantitative breakdown of diagnosis accuracy, cases of error amplification, or comparison of repair success versus failure modes is provided, which directly affects the claim that the loop mitigates mid-clip simulation errors.
Authors: We concur that quantitative support for the diagnosis step is essential. In the revision we will add a new analysis subsection (and corresponding appendix tables) that reports: (i) overall diagnosis accuracy on short clips, (ii) frequency of error amplification (misdiagnosis leading to worse downstream steps), and (iii) repair success rates broken down by failure mode (long-horizon drift versus mid-clip simulation errors). The numbers will be derived from manual inspection of a stratified sample of Gen-ViRe and VBVR-Bench trajectories. revision: yes
Circularity Check
No significant circularity; empirical framework on external benchmarks
full rationale
The paper describes an empirical closed-loop collaboration framework between VLM and VGM, evaluated on Gen-ViRe and VBVR-Bench with comparisons to single-inference, Pass@k, and test-time scaling baselines at matched compute. No equations, fitted parameters, predictions derived from inputs, or self-referential definitions appear in the abstract or described method. The central mechanism (step-level VLM planning, generation, inspection, and prompt update) is presented as a procedural architecture rather than a derivation that reduces to its own inputs by construction. No self-citations are invoked as load-bearing uniqueness theorems or ansatzes. Results are framed as experimental improvements on external benchmarks, making the derivation self-contained against independent evaluation.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
VLM plans the immediate next action, inspects the clip the VGM generates, and folds the verifier's diagnosis directly into the next action prompt
-
IndisputableMonolith/Foundation/AlexanderDuality.leanalexander_duality_circle_linking unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
step-level closed-loop collaboration... largest gains on the hardest tasks
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Video generation models as world simulators
Tim Brooks, Bill Peebles, et al. Video generation models as world simulators. https:// openai.com/index/video-generation-models-as-world-simulators/ , 2024. Ope- nAI Technical Report
work page 2024
-
[2]
Large Language Monkeys: Scaling Inference Compute with Repeated Sampling
Bradley Brown, Jordan Juravsky, Ryan Ehrlich, Ronald Clark, Quoc V . Le, Christopher Ré, and Azalia Mirhoseini. Large language monkeys: Scaling inference compute with repeated sampling.arXiv preprint arXiv:2407.21787, 2024
work page internal anchor Pith review arXiv 2024
-
[3]
MMGR: Multi-modal generative reasoning.arXiv preprint arXiv:2512.14691, 2025
Zefan Cai, Haoyi Qiu, Tianyi Ma, Haozhe Zhao, Gengze Zhou, et al. MMGR: Multi-modal generative reasoning.arXiv preprint arXiv:2512.14691, 2025
-
[4]
TiViBench: Benchmarking think-in-video reasoning for video generative models
Harold Haodong Chen, Disen Lan, Wen-Jie Shu, Qingyang Liu, Zihan Wang, et al. TiViBench: Benchmarking think-in-video reasoning for video generative models. InComputer Vision and Pattern Recognition (CVPR), 2026
work page 2026
-
[5]
Wenyan Cong, Hanqing Zhu, Peihao Wang, et al. Can test-time scaling improve world founda- tion model? InConference on Language Modeling (COLM), 2025
work page 2025
-
[6]
Gemini Team, Google DeepMind. Gemini 2.5: Pushing the frontier with advanced reason- ing, multimodality, long context, and next generation agentic capabilities.arXiv preprint arXiv:2507.06261, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[7]
Google DeepMind. Veo 3.1. Technical report, Google DeepMind, January
-
[8]
URL https://blog.google/innovation-and-ai/technology/ai/ veo-3-1-ingredients-to-video/. Released January 13, 2026
work page 2026
-
[9]
Thinkmorph: Emergent properties in multimodal interleaved chain-of-thought reasoning
Jiawei Gu, Yunzhuo Hao, Huichen Will Wang, Linjie Li, Michael Qizhe Shieh, Yejin Choi, Ranjay Krishna, and Yu Cheng. ThinkMorph: Emergent properties in multimodal interleaved chain-of-thought reasoning.arXiv preprint arXiv:2510.27492, 2025
-
[10]
Ziyu Guo, Xinyan Chen, Renrui Zhang, Ruichuan An, Yu Qi, et al. Are video models ready as zero-shot reasoners? an empirical study with the MME-CoF benchmark.arXiv preprint arXiv:2510.26802, 2025
-
[11]
Haoran He, Jiajun Liang, Xintao Wang, Pengfei Wan, Di Zhang, Kun Gai, and Ling Pan. Scaling image and video generation via test-time evolutionary search.arXiv preprint arXiv:2505.17618, 2025
-
[12]
Yushi Hu, Weijia Shi, Xingyu Fu, Dan Roth, Mari Ostendorf, Luke Zettlemoyer, Noah A. Smith, and Ranjay Krishna. Visual sketchpad: Sketching as a visual chain of thought for multimodal language models. InAdvances in Neural Information Processing Systems (NeurIPS), 2024
work page 2024
-
[13]
Ziqi Huang, Ning Yu, Gordon Chen, et al. VChain: Chain-of-visual-thought for reasoning in video generation.arXiv preprint arXiv:2510.05094, 2025
-
[14]
Self-refining video sampling.arXiv preprint arXiv:2601.18577, 2026
Sangwon Jang, Taekyung Ki, Jaehyeong Jo, Saining Xie, Jaehong Yoon, and Sung Ju Hwang. Self-refining video sampling.arXiv preprint arXiv:2601.18577, 2026
-
[15]
Self-correcting LLM-controlled diffusion models
Tsung-Wei Ke, Fahim Tajwar, et al. Self-correcting LLM-controlled diffusion models. In Computer Vision and Pattern Recognition (CVPR), 2024
work page 2024
-
[16]
Imagine while reasoning in space: Multimodal visualization-of-thought
Chengzu Li, Wenshan Wu, Huanyu Zhang, et al. Imagine while reasoning in space: Multimodal visualization-of-thought. InInternational Conference on Machine Learning (ICML), 2025
work page 2025
-
[17]
Chengzu Li, Zanyi Wang, Jiaang Li, Yi Xu, Han Zhou, et al. Thinking in frames: How visual context and test-time scaling empower video reasoning.arXiv preprint arXiv:2601.21037, 2026
-
[18]
Yifan Li, Yukai Gu, Yingqian Min, Zikang Liu, Yifan Du, Kun Zhou, Min Yang, Wayne Xin Zhao, and Minghui Qiu. Beyond the last frame: Process-aware evaluation for generative video reasoning.arXiv preprint arXiv:2512.24952, 2026. 10
-
[19]
VideoDirectorGPT: Consistent multi- scene video generation via LLM-guided planning
Han Lin, Abhay Zala, Jaemin Cho, and Mohit Bansal. VideoDirectorGPT: Consistent multi- scene video generation via LLM-guided planning. InConference on Language Modeling (COLM), 2024
work page 2024
-
[20]
Video- T1: Test-time scaling for video generation
Fangfu Liu, Hanyang Wang, Yimo Cai, Kaiyan Zhang, Xiaohang Zhan, and Yueqi Duan. Video- T1: Test-time scaling for video generation. InInternational Conference on Computer Vision (ICCV), 2025
work page 2025
-
[21]
Xinxin Liu, Zhaopan Xu, Ming Li, Kai Wang, Yong Jae Lee, and Yuzhang Shang. Can world simulators reason? Gen-ViRe: A generative visual reasoning benchmark.arXiv preprint arXiv:2511.13853, 2025
-
[22]
Yang Luo, Xuanlei Zhao, Baijiong Lin, Lingting Zhu, Liyao Tang, Yuqi Liu, Ying-Cong Chen, Shengju Qian, Xin Wang, and Yang You. V-ReasonBench: Toward unified reasoning benchmark suite for video generation models.arXiv preprint arXiv:2511.16668, 2025
-
[23]
Inference-time scaling for diffusion models beyond scaling denoising steps
Nanye Ma, Shangyuan Tong, Haolin Jia, et al. Inference-time scaling for diffusion models beyond scaling denoising steps. InComputer Vision and Pattern Recognition (CVPR), 2025
work page 2025
-
[24]
Whiteboard-of-thought: Thinking step- by-step across modalities
Sachit Menon, Richard Zemel, and Carl V ondrick. Whiteboard-of-thought: Thinking step- by-step across modalities. InEmpirical Methods in Natural Language Processing (EMNLP), 2024
work page 2024
-
[25]
Movie Gen: A Cast of Media Foundation Models
Meta AI. Movie Gen: A cast of media foundation models.arXiv preprint arXiv:2410.13720, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[26]
World Simulation with Video Foundation Models for Physical AI
NVIDIA Cosmos Team. World simulation with video foundation models for physical ai, 2025. URLhttps://arxiv.org/abs/2511.00062
work page internal anchor Pith review arXiv 2025
-
[27]
Qwen3.5: Towards native multimodal agents, February 2026
Qwen Team. Qwen3.5: Towards native multimodal agents, February 2026. URL https: //qwen.ai/blog?id=qwen3.5
work page 2026
-
[28]
Scaling LLM Test-Time Compute Optimally can be More Effective than Scaling Model Parameters
Charlie Snell, Jaehoon Lee, Kelvin Xu, and Aviral Kumar. Scaling LLM test-time compute op- timally can be more effective than scaling model parameters.arXiv preprint arXiv:2408.03314, 2024
work page internal anchor Pith review Pith/arXiv arXiv 2024
-
[29]
Zhaochen Su, Linjie Li, Mingyang Song, Yunzhuo Hao, Zhengyuan Yang, et al. Open- ThinkIMG: Learning to think with images via visual tool reinforcement learning.arXiv preprint arXiv:2505.08617, 2025
-
[30]
Thinking with Images for Multimodal Reasoning: Foundations, Methods, and Future Frontiers
Zhaochen Su, Peng Xia, Hangyu Guo, et al. Thinking with images for multimodal reasoning: Foundations, methods, and future frontiers.arXiv preprint arXiv:2506.23918, 2025
work page internal anchor Pith review arXiv 2025
-
[31]
Thinking with video: Video generation as a promising multimodal reasoning paradigm
Jingqi Tong, Yurong Mou, Hangcheng Li, Mingzhe Li, Yongzhuo Yang, et al. Thinking with video: Video generation as a promising multimodal reasoning paradigm. InComputer Vision and Pattern Recognition (CVPR), 2026
work page 2026
-
[32]
Wan: Open and Advanced Large-Scale Video Generative Models
Wan Team. Wan: Open and advanced large-scale video generative models.arXiv preprint arXiv:2503.20314, 2025
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[33]
A very big video reasoning suite
Maijunxian Wang, Ruisi Wang, Juyi Lin, et al. A very big video reasoning suite.arXiv preprint arXiv:2602.20159, 2026
-
[34]
VideoAgent: Long-form video understanding with large language model as agent
Xiaohan Wang, Yuhui Zhang, Orr Zohar, and Serena Yeung-Levy. VideoAgent: Long-form video understanding with large language model as agent. InEuropean Conference on Computer Vision (ECCV), 2024
work page 2024
-
[35]
Video models are zero-shot learners and reasoners
Thaddäus Wiedemer, Yuxuan Li, Paul Vicol, Shixiang Shane Gu, Nick Matarese, Kevin Swersky, Been Kim, Priyank Jaini, and Robert Geirhos. Video models are zero-shot learners and reasoners. arXiv preprint arXiv:2509.20328, 2025
work page internal anchor Pith review arXiv 2025
-
[36]
PhyT2V: LLM-guided iterative self-refinement for physics-grounded text-to-video generation
Qiyao Xue, Xiangyu Yin, Boyuan Yang, et al. PhyT2V: LLM-guided iterative self-refinement for physics-grounded text-to-video generation. InComputer Vision and Pattern Recognition (CVPR), 2025. 11
work page 2025
-
[37]
Cheng Yang, Haiyuan Wan, Yiran Peng, Xin Cheng, Zhaoyang Yu, et al. Reasoning via video: The first evaluation of video models’ reasoning abilities through maze-solving tasks.arXiv preprint arXiv:2511.15065, 2025
-
[38]
Mastering text-to-image diffusion: Recaptioning, planning, and generating with multimodal LLMs
Ling Yang, Zhaochen Yu, Chenlin Meng, Minkai Xu, Stefano Ermon, and Bin Cui. Mastering text-to-image diffusion: Recaptioning, planning, and generating with multimodal LLMs. In International Conference on Machine Learning (ICML), 2024
work page 2024
-
[39]
UniSim: Learning interactive real-world simulators
Mengjiao Yang, Yilun Du, Kamyar Ghasemipour, et al. UniSim: Learning interactive real-world simulators. InInternational Conference on Learning Representations (ICLR), 2024
work page 2024
-
[40]
Xindi Yang, Baolu Li, Yiming Zhang, et al. VLIPP: Towards physically plausible video generation with vision and language informed physical prior. InInternational Conference on Computer Vision (ICCV), 2025
work page 2025
-
[41]
CogVideoX: Text-to-video diffusion models with an expert transformer
Zhuoyi Yang, Jiayan Teng, Wendi Zheng, et al. CogVideoX: Text-to-video diffusion models with an expert transformer. InInternational Conference on Learning Representations (ICLR), 2025. 12 Appendix A Implementation Details A.1 Hyperparameters Pipeline budget.We set Nmax=3 planning steps and M=3 per-step generation attempts as the defaultCollabVRconfigurati...
work page 2025
-
[42]
Each step must describe ONE clear visual action that a video generation model can simulate in 6 seconds.,→
-
[43]
Only plan the NEXT IMMEDIATE step
DO NOT plan the entire task at once. Only plan the NEXT IMMEDIATE step
-
[44]
Describe the action in terms of VISIBLE MOTION and CHANGE -- what should move, where, and how.,→
-
[45]
Include the EXACT target state: what the frame should look like when this step is done.,→
-
[46]
If the task appears to be already complete based on the current image, set "task_complete" to true.,→ Output (strict JSON): { "observation": "Brief description of what you see in the current image", "remaining_goal": "What still needs to happen to complete the task", "task_complete": false, "instruction": "Detailed video generation prompt for the next ste...
-
[47]
Did the intended motion/transformation START to happen in the correct direction?,→
-
[48]
Is the result CONSISTENT with the planned action (even if incomplete)?
-
[49]
Were there FUNDAMENTAL errors (wrong direction, wrong object, completely wrong action, scene collapse)?,→ What is NOT a rejection reason: - Action happened but didn't fully complete (partial progress is fine) - Minor rendering artifacts or small imprecisions - The final task goal is not yet reached (planner's job) On Rejection -- estimate "good_fraction" ...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.