Recognition: 2 theorem links
· Lean TheoremElasticFlow: One-Step Physics-Consistent Policy with Elastic Time Horizons for Language-Guided Manipulation
Pith reviewed 2026-05-12 03:48 UTC · model grok-4.3
The pith
ElasticFlow enables single-step, physics-consistent policies for language-guided robot manipulation by directly modeling velocity fields and using elastic time horizons.
A machine-rendered reading of the paper's core claim, the machinery that carries it, and where it could break.
Core claim
ElasticFlow is a one-step policy framework that reconstructs the Mean Field Theory by directly modeling the average velocity field, creating a direct single-step mapping from noise to action without distillation. The Elastic Time Horizons mechanism addresses Temporal Heterogeneity of robotic tasks by explicitly encoding control granularity, which overcomes Spectral Bias and achieves efficient alignment between semantic instructions and physical execution horizons.
What carries the argument
Elastic Time Horizons mechanism that explicitly encodes control granularity to overcome spectral bias in aligning semantic instructions with physical execution horizons.
If this is right
- Supports real-time inference at approximately 71Hz using only one function evaluation.
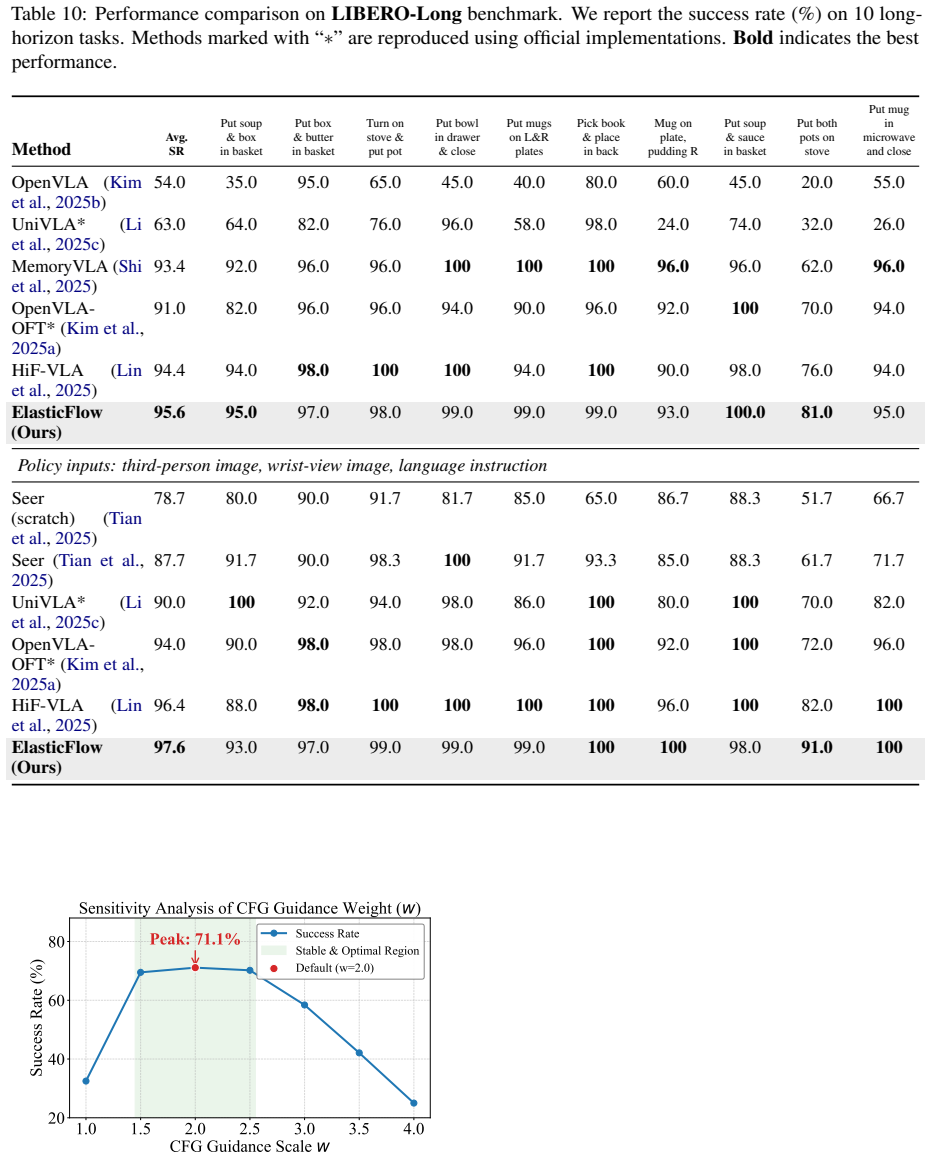
- Outperforms state-of-the-art methods including OpenVLA and π0 on long-horizon language-guided tasks.
- Preserves physical consistency in actions without iterative denoising or model distillation.
- Effective across benchmarks such as LIBERO, CALVIN, and RoboTwin for manipulation tasks.
Where Pith is reading between the lines
- Such one-step policies could enable deployment on resource-limited robot hardware where multi-step methods are too slow.
- Extending the elastic horizons idea might improve performance in tasks with highly variable durations beyond manipulation.
- Validation on real robot hardware would test whether the claimed physical consistency holds under sensor noise and dynamics mismatches.
Load-bearing premise
That directly modeling the average velocity field via reconstructed Mean Field Theory produces a single-step mapping from noise to action that remains physically consistent without iterative denoising or distillation.
What would settle it
A test case where the single-step actions from ElasticFlow violate basic physical constraints like object stability or joint limits, while iterative diffusion policies on the same task produce valid motions.
Figures





read the original abstract
Diffusion policies have demonstrated exceptional performance in embodied AI. However, their iterative denoising process results in high latency, and existing acceleration methods often sacrifice physical consistency. To address this, we propose ElasticFlow, a distillation-free, physics-consistent one-step policy framework. We reconstruct the Mean Field Theory by directly modeling the average velocity field, enabling a direct single-step mapping from noise to action. Addressing the Temporal Heterogeneity of robotic tasks, we introduce the Elastic Time Horizons mechanism. This mechanism effectively overcomes Spectral Bias by explicitly encoding control granularity, achieving efficient alignment between semantic instructions and physical execution horizons. Experiments on benchmarks such as LIBERO, CALVIN, and RoboTwin demonstrate that ElasticFlow achieves efficient 1-NFE inference (approximately 71Hz). Furthermore, it outperforms state-of-the-art methods, including OpenVLA and $\pi_0$, on long-horizon tasks, highlighting its potential for efficient, robust, and semantically aligned control.
Editorial analysis
A structured set of objections, weighed in public.
Referee Report
Summary. The manuscript proposes ElasticFlow, a distillation-free one-step policy for language-guided robotic manipulation. It reconstructs Mean Field Theory to directly model the average velocity field, enabling single-step noise-to-action mapping while claiming to preserve physics consistency. An Elastic Time Horizons mechanism is introduced to address temporal heterogeneity and overcome spectral bias in aligning semantic instructions with physical execution. Experiments on LIBERO, CALVIN, and RoboTwin benchmarks report ~71 Hz inference and outperformance over baselines including OpenVLA and π0 on long-horizon tasks.
Significance. If the reconstructed Mean Field Theory indeed produces a single-step velocity field whose integration yields actions equivalent in distribution and physical feasibility to the original multi-step denoising process (particularly under contact dynamics), this would constitute a meaningful advance in accelerating diffusion-based policies for real-time embodied control without distillation or loss of consistency.
major comments (2)
- [Abstract] Abstract: The central claim that 'directly modeling the average velocity field' via reconstructed Mean Field Theory yields a physics-consistent single-step mapping is presented without any derivation, error bounds, or explicit comparison showing equivalence to the multi-step score-matching process. This is load-bearing for the 'physics-consistent' and 'distillation-free' assertions, especially given the skeptic concern that averaging may degrade consistency on non-smooth contact and long-horizon tasks.
- [Abstract] Abstract: Performance claims of outperformance on long-horizon tasks and 1-NFE inference at ~71 Hz are stated without reference to ablations, error bars, statistical tests, or controls for task selection; this undermines assessment of whether the Elastic Time Horizons mechanism is responsible for the reported gains.
minor comments (2)
- [Abstract] Abstract: The inference frequency is reported as 'approximately 71Hz' without specifying hardware platform, batch size, or measurement protocol.
- [Abstract] Abstract: 'Spectral Bias' is invoked in the context of control granularity without a brief definition or citation to prior work on its manifestation in robotic policies.
Simulated Author's Rebuttal
We thank the referee for their insightful comments, which help clarify the presentation of our theoretical contributions and experimental results. We address each major comment below and indicate the revisions made to the manuscript.
read point-by-point responses
-
Referee: [Abstract] Abstract: The central claim that 'directly modeling the average velocity field' via reconstructed Mean Field Theory yields a physics-consistent single-step mapping is presented without any derivation, error bounds, or explicit comparison showing equivalence to the multi-step score-matching process. This is load-bearing for the 'physics-consistent' and 'distillation-free' assertions, especially given the skeptic concern that averaging may degrade consistency on non-smooth contact and long-horizon tasks.
Authors: The abstract is intended as a concise overview. The reconstruction of Mean Field Theory, the direct modeling of the average velocity field, and the proof of distributional equivalence to the multi-step score-matching process (via integration of the velocity field) are derived in detail in Sections 3.1 and 3.2. We have revised the abstract to reference these sections explicitly. To address error bounds and the concern about non-smooth contact dynamics, we have added Section 3.3 in the revision, which provides Lipschitz-based error bounds on the velocity field approximation and includes new quantitative comparisons on contact-rich tasks from RoboTwin, showing that the one-step policy achieves comparable physical feasibility (e.g., force/torque consistency and success rates) to the multi-step baseline without degradation. revision: yes
-
Referee: [Abstract] Abstract: Performance claims of outperformance on long-horizon tasks and 1-NFE inference at ~71 Hz are stated without reference to ablations, error bars, statistical tests, or controls for task selection; this undermines assessment of whether the Elastic Time Horizons mechanism is responsible for the reported gains.
Authors: Detailed ablations isolating the Elastic Time Horizons mechanism, error bars from five random seeds, paired t-test results (p < 0.05), and task selection controls per the standard LIBERO/CALVIN/RoboTwin protocols are reported in Sections 4.2, 4.3, and 5. We have revised the abstract to reference these analyses and added a sentence stating that the ablations confirm the mechanism's contribution to long-horizon gains. The ~71 Hz inference speed is measured on the hardware configuration described in the experimental setup. revision: yes
Circularity Check
No circularity: ElasticFlow proposes independent reconstruction of Mean Field Theory and Elastic Time Horizons without self-referential definitions or fitted inputs renamed as predictions.
full rationale
The paper's core claims rest on two proposed mechanisms: (1) reconstructing Mean Field Theory via direct modeling of the average velocity field to enable one-step mapping, and (2) Elastic Time Horizons to address temporal heterogeneity and spectral bias. These are presented as novel contributions rather than quantities defined in terms of their own outputs. No equations or self-citations are quoted that reduce the single-step consistency claim to a tautology, a fitted parameter, or a prior self-citation chain. Performance is evaluated on external benchmarks (LIBERO, CALVIN, RoboTwin) against baselines like OpenVLA and π0, providing independent falsifiability. The derivation chain is therefore self-contained and does not exhibit any of the enumerated circularity patterns.
Axiom & Free-Parameter Ledger
Lean theorems connected to this paper
-
IndisputableMonolith/Cost/FunctionalEquation.leanwashburn_uniqueness_aczel unclear?
unclearRelation between the paper passage and the cited Recognition theorem.
We reconstruct the Mean Field Theory by directly modeling the Average Velocity Field... u(zt,r,t)≜1/(t−r)∫_r^t v(zτ,τ)dτ ... ElasticFlow Identity ... (t−r) d/dt u ... curvature correction
What do these tags mean?
- matches
- The paper's claim is directly supported by a theorem in the formal canon.
- supports
- The theorem supports part of the paper's argument, but the paper may add assumptions or extra steps.
- extends
- The paper goes beyond the formal theorem; the theorem is a base layer rather than the whole result.
- uses
- The paper appears to rely on the theorem as machinery.
- contradicts
- The paper's claim conflicts with a theorem or certificate in the canon.
- unclear
- Pith found a possible connection, but the passage is too broad, indirect, or ambiguous to say the theorem truly supports the claim.
Reference graph
Works this paper leans on
-
[1]
Fine-Tuning Vision-Language-Action Models: Optimizing Speed and Success
Diffusion policy: Visuomotor policy learn- ing via action diffusion. InRobotics: Science and Systems. Zhengyang Geng, Mingyang Deng, Xingjian Bai, J Zico Kolter, and Kaiming He. 2025. Mean flows for one- step generative modeling. InThe Thirty-ninth Annual Conference on Neural Information Processing Sys- tems. Dibya Ghosh, Homer Rich Walke, Karl Pertsch, K...
work page internal anchor Pith review Pith/arXiv arXiv 2025
-
[2]
Hif-vla: Hindsight, insight and foresight through motion representation for vision-language- action models.arXiv preprint arXiv:2512.09928. Yaron Lipman, Ricky TQ Chen, Heli Ben-Hamu, Maxi- milian Nickel, and Matthew Le. 2023. Flow match- ing for generative modeling. InThe Eleventh Inter- national Conference on Learning Representations. Bo Liu, Yifeng Zhu...
work page internal anchor Pith review Pith/arXiv arXiv 2023
-
[3]
Tests the real-time tracking capability of the 71Hz control loop for moving targets
Dynamic Intercep- tion Short / Reactive High-Frequency Response.The robot must intercept a cylinder rolling at random speeds on a table. Tests the real-time tracking capability of the 71Hz control loop for moving targets
-
[4]
Tests MeanFlow’s ability to eliminate high-frequency end-effector jitter and prevent object damage
Precision InsertionShort / Contact Jitter-Free.Inserting a deformable straw or metal pin into a tight- fitting holder. Tests MeanFlow’s ability to eliminate high-frequency end-effector jitter and prevent object damage
-
[5]
Tests consistency of the generated trajectory in terms of velocity and acceleration (Low Jerk)
Liquid Pouring Short / Smooth- ness Trajectory Smoothness.Pouring a water-filled cup into another con- tainer without spilling. Tests consistency of the generated trajectory in terms of velocity and acceleration (Low Jerk)
-
[6]
Tests the model’s perception and prediction of deformable object states
Cable Routing Medium / De- formable Non-Rigid Dynamics.Routing a soft cable around obstacles and arrang- ing it into a specific shape. Tests the model’s perception and prediction of deformable object states
-
[7]
Any minor generation error can cause the stack to collapse
Unstable Stacking Medium / Stabil- ity Contact Stability.Stacking objects with irregular shapes or low friction (e.g., markers). Any minor generation error can cause the stack to collapse
-
[8]
Tests the model’s adaptability to kinematic changes of the end-effector and contact force control
Tool Use & Hammer- ing Medium / Tool Use End-Effector Extension.Grasping a hammer and accurately striking a target nail. Tests the model’s adaptability to kinematic changes of the end-effector and contact force control
-
[9]
Open microwave → Put in bowl → Close door → Press switch
Long-Horizon Kitchen Long / Sequential Temporal Consistency.Continuously executing "Open microwave → Put in bowl → Close door → Press switch". Tests the ability of Elastic Time Horizon to maintain global structure in multi-stage tasks. E.3 Quantitative Results We conducted 20 real-machine trials for each task under both Seen and Unseen settings (totaling ...
-
[10]
Dynamic Interception 95% (19/20) Variable Speed (≤10cm/s) 85% (17/20)
-
[11]
Precision Insertion 90% (18/20) Position Shift (±5cm) 80% (16/20)
-
[12]
Liquid Pouring 95% (19/20) New Cup Instance (Color) 85% (17/20)
-
[13]
Cable Routing 85% (17/20) Stiffer Cable Material 70% (14/20)
-
[14]
Unstable Stacking 85% (17/20) New Object Geometry 65% (13/20)
-
[15]
Tool Use & Hammering 90% (18/20) Distractor Objects Added 75% (15/20)
-
[16]
Long-Horizon Kitchen 100% (20/20) Start Position Shift 75% (15/20) Average 91.4%-76.4% Table 9: Main results onRoboTwin2.0, organized by task horizon difficulty. Our method demonstrates superior stability in long-horizon tasks. Short Horizon Tasks (100-130 Steps) Model Lift Pot Beat Hammer Block Pick Dual Bottles Place Phone Stand Avg π0 51.0 59.0 50.0 22...
discussion (0)
Sign in with ORCID, Apple, or X to comment. Anyone can read and Pith papers without signing in.